
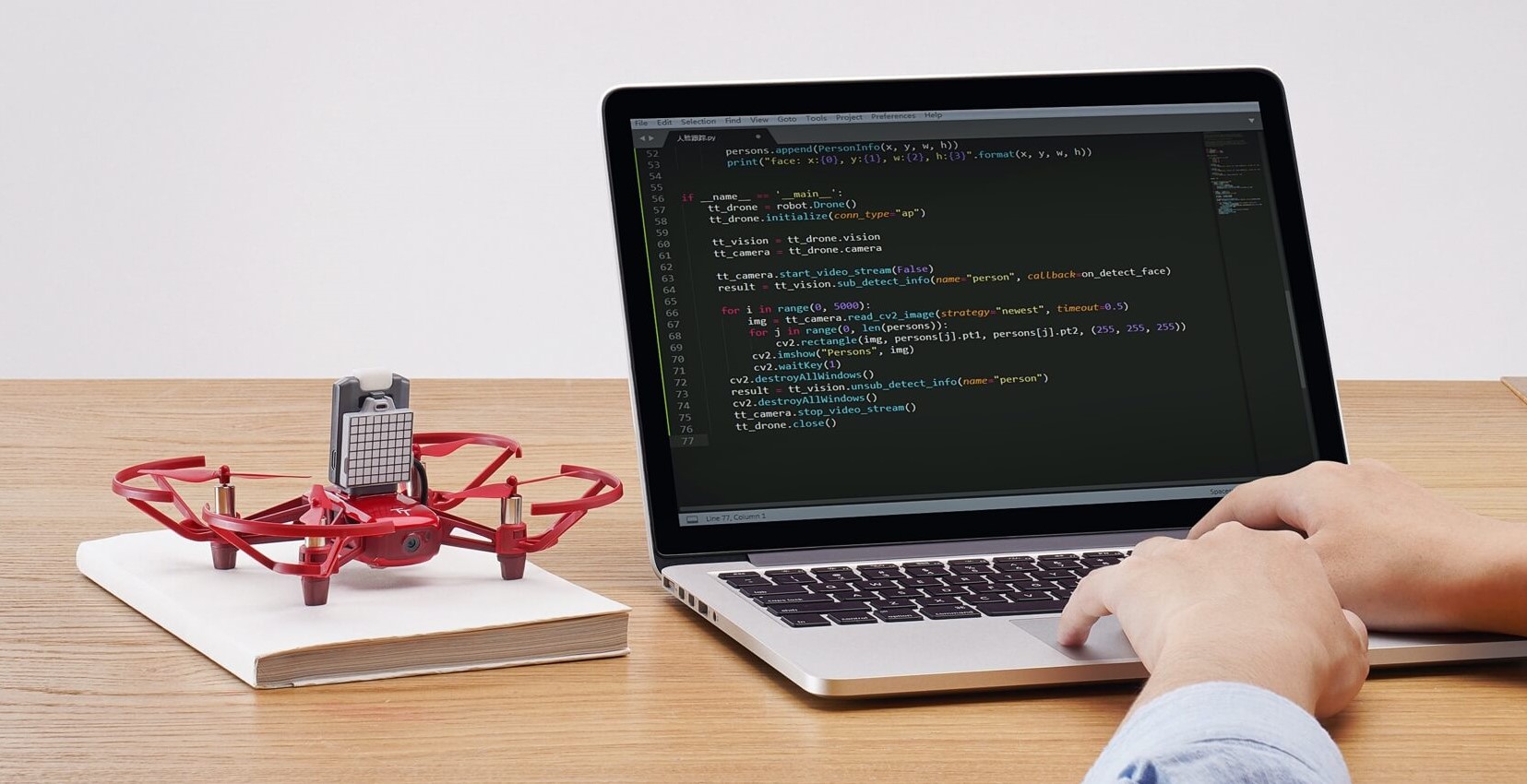
先放個專案演示視頻鎮帖:
可能是大疆TT無人機的第一款DIY遙控器!大疆TT無人機編程試飛初體驗!
認識我的朋友,大概都知道,我是一個“運氣爆棚”的人,經常能“撿”到一些好玩的東西,這不,前兩天在家門口“撿”到一架大疆 RoboMaster Tello Talent TT 教育無人機(下文簡稱:TT 無人機或 TT),是基于大疆 Tello EDU 無人機升級而來的新產品,可以用第三方軟體進行編程控制,那還不趕緊來試玩一下!

TT 無人機介紹
為了對這款 TT 無人機進行編程控制,我專門查(抄)閱(襲)了大疆官網對它的介紹和相關資料,
TT 無人機是大疆首款擁抱開源的教育無人機 ,為了使該款無人機能夠更加符合開源精神和青少年科技創新教育核心,讓國內中小學師生有更極致的教學體驗,大疆與 DFRobot 合作,將 Mind+ 圖形化編程軟體與 TT 無人機深度結合,使得 TT 無人機更加如虎添翼,通過豐富的軟硬體拓展性,可以實作例如環境感知、人臉識別、自動跟隨、手勢識別、手掌控制、多機協同、人工智能等各種應用,

那么 TT 無人機是如何做到擁抱開源的呢?
- 基于 ESP32 控制器的 TT 擴展模塊:TT 無人機在大疆原有的產品 Tello EDU 無人機的基礎之上,新增了一個開源控制器,它是一款基于 ESP32 芯片的主控板,基于 ESP32 強大的開源生態,可以讓 TT 無人機同時支持 Arduino、microPython、圖形化等編程環境,同時借助 ESP32 強大的 WiFi、藍牙連接功能,具備強大的通信能力,
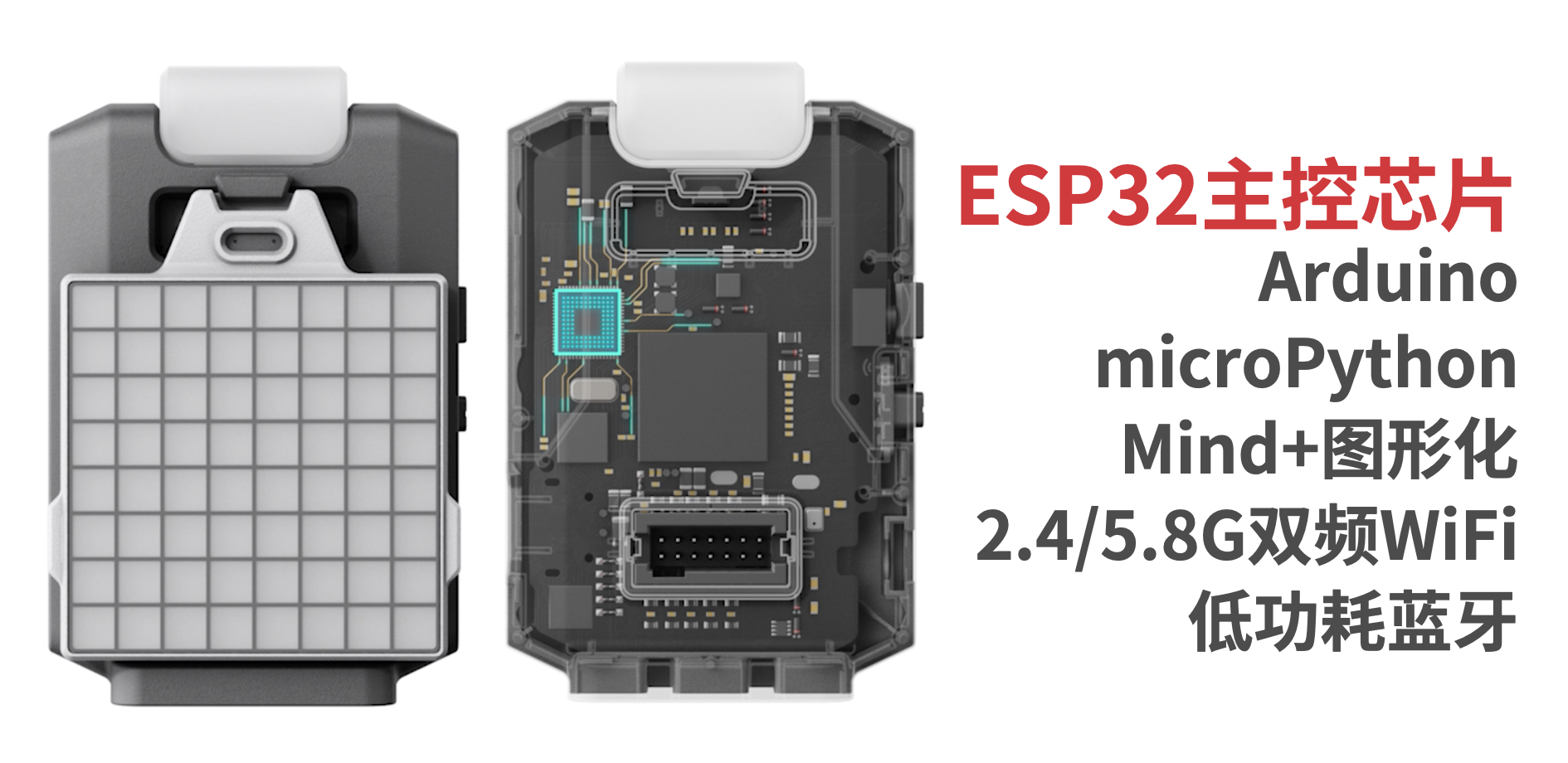
- 集成多種可編程傳感器/模塊:搭載 RGB 全彩 LED 燈、8×8 紅/藍雙色 LED 點陣屏、ToF 紅外測距傳感器等,可以實作如燈光控制、圖案影片顯示、智能避障等多種編程效果,



- 轉接拓展板,支持第三方傳感器:為了讓用戶可以連接更多的開源硬體,實作更加豐富的創意,TT 無人機提供了一個 2×7 PIN 2.54mm 間距的直插封裝介面,支持 I2C 、SPI 、UART 、GPIO 多種編程協議,并提供 5V/3.3V 電源介面,


- 開放的 RoboMaster SDK:借助全新的 RoboMaster SDK 以及視頻流資料,可以輕松支持多種可編程傳感器介面,機器視覺、深度學習等人工智能前沿科技也得以走進中小學課堂,
編程控制框架
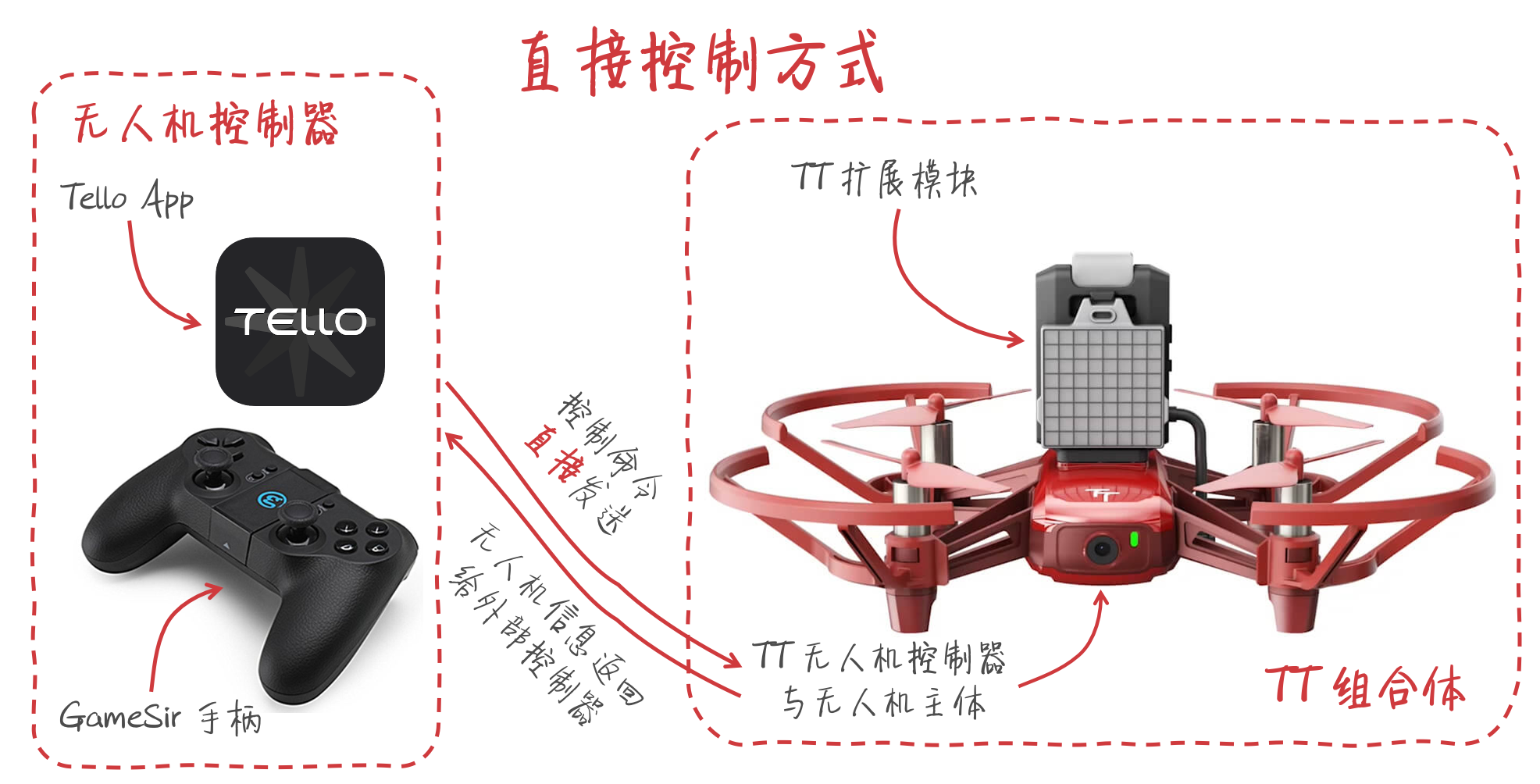
如果需要實作對 TT 無人機進行控制,有兩種思路:
1、直接控制:TT 無人機其實就類似大疆 Tello 無人機,它有自己的飛行控制器,它通過獲取飛機自身的陀螺儀等傳感器資訊,來控制飛機的四個空心杯電機,從而實作控制飛機的物理運動,來自手機 App 或手柄的控制指令,可以直接發送到 TT 無人機的控制器,并且通過控制器進一步變成飛行指令;而無人機的一些資訊,比如電量、當前高度等,也可以通過控制器直接發送出來,
2、間接控制:間接控制其實就是通過 TT 擴展模塊實作的,TT 擴展模塊對無人機的控制,其實也像手機 App、手柄一樣,是通過向 TT 無人機的控制器發送控制指令來實作的,而這個具體的通信程序,則是由 TT 無人機的機載 Micro USB 介面通過串口通訊的方式來實作,那么就可以通過對 TT 擴展模塊進行編程,獲取第三方軟體或者各種開源硬體與傳感器的相關資訊,然后間接去控制 TT 無人機,
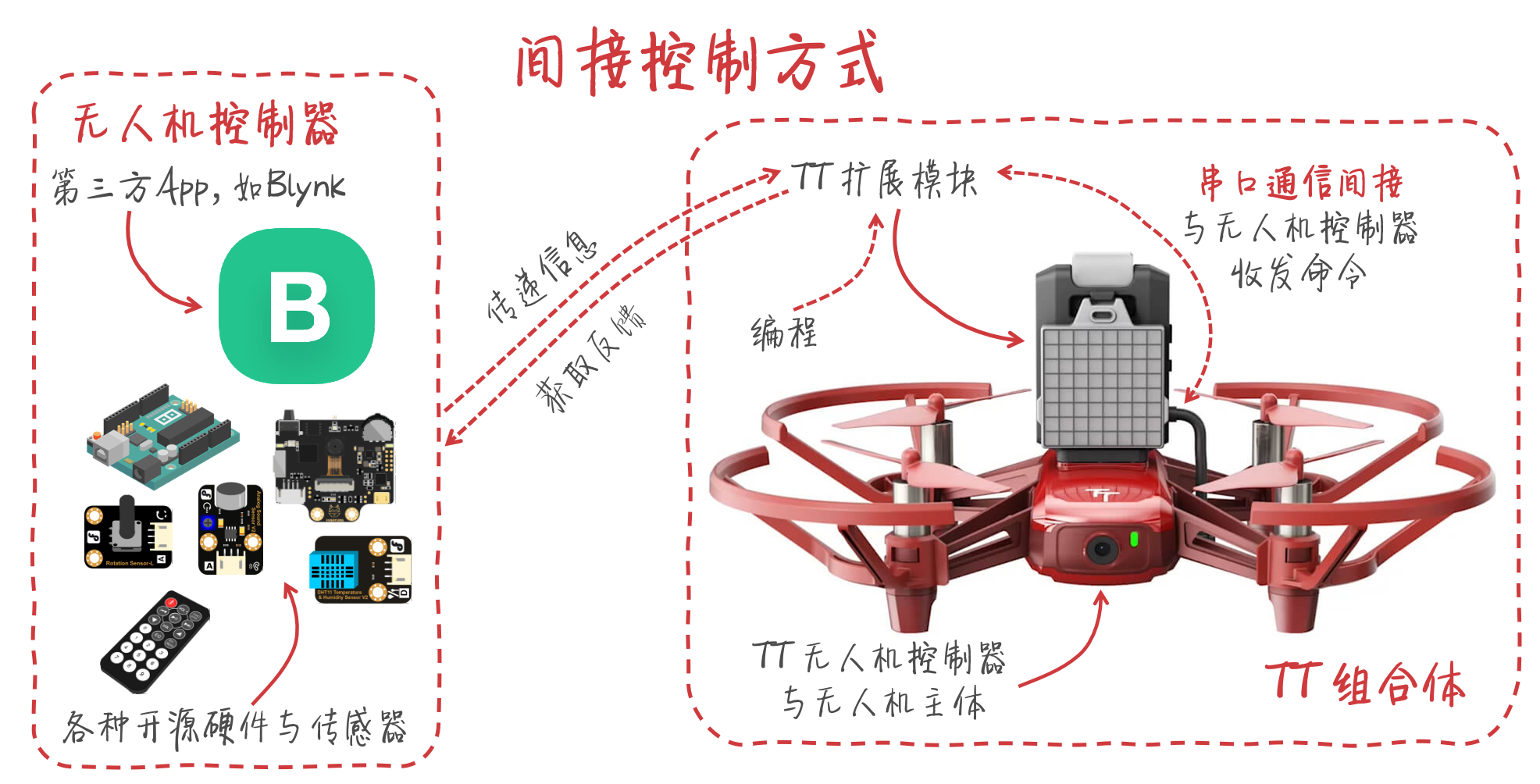
所以,TT 擴展相當于附著在 TT 無人機之上的外部大腦,它不僅拓展 了 TT 無人機本身的感知能力,還豐富了 TT 無人機的功能性,我們可以通過向 TT 擴展模塊燒寫自己的程式,來使 TT 無人機組合體完成僅僅依靠 TT 無人機本身難以完成的復雜飛行任務,同時相比手動遙控控制,借助程式的控制,我們可以完成更加精確的控制指令,
試飛小任務
介紹了那么多,接下來我們就開始對 TT 無人機進行編程,來完成一個試飛小任務吧,
大疆官方的資料中,介紹了 TT 無人機可以通過 Tello App 和定制版 GameSir 小雞手柄 T1D 進行遙控,既然是一款擁抱開源的教育無人機,我當然要對 TT 無人機為所欲為了,為何不自己設計一個 DIY 版的手機遙控器呢:想加什么功能就加什么功能,比如后續可以增加顯示各種外接傳感器的資料的功能;想怎么玩就怎么玩,比如可以通過編程,實作更加復雜的特技動作,
既然有了官方支持的遙控器,為什么還要自己再設計一個遙控器呢?原因如下:
- 如果使用 Tello App 進行遙控,就不能使用編程功能,更不用說集成第三方傳感器了,那 TT 無人機跟普通的 Tello 無人機就沒有區別了,
- 如果使用 GameSir 手柄進行遙控,雖然可以進行編程以及添加第三方傳感器,但是目前大疆官方只提供了 Arduino 代碼版的編程示例,并沒有圖形化版本的示例程式,不適合大部分中小學生進行學習,
那么,我將如何實作 DIY 遙控器呢?
- 為了更加方便大家上手,我將使用 Mind+ 圖形化編程環境,通過簡單的積木式拖拽,就可以完成豐富的功能;
- 試玩程序中,為了降低硬體成本,我將僅使用手機,通過 Blynk 物聯網平臺來實作 DIY 遙控器的設計與制作,Blynk 物聯網平臺是一個非常簡單好用的物聯網開發平臺,幾分鐘之內就可以為你的物聯網專案創建一個手機 App,
為了實作這個專案,我升級了之前設計的 Mind+ 版的 Blynk 用戶庫,以使它支持 TT 無人機的編程,學會了本專案的編程原理之后,除了可以自己設計手機 App 來控制大疆無人機之外,你也可以設計物體版的硬體遙控手柄,
關于 Mind+ 軟體的使用教程,由于篇幅限制,請參考 Mind+ 官方教程,
關于 Blynk 的入門教程,請參考我的另一本書:《物聯網,So Easy!——基于 Blynk 平臺的 IoT 專案實踐》,
Blynk 專案設定
作為可能是第一款 TT 無人機的 DIY 版手機遙控器,我要把這個遙控器設計成什么樣子呢?為了方便操控,以及使用體驗的統一,這里我參考了 Tello App 的外觀,設計了一個簡化版的操控界面,
先來看一下官方的 Tello App 版遙控器:除了起飛 / 降落功能之外,Tello App 最重要的組件就是無人機飛行控制了,它采用了 2 個搖桿,來實作無人機的各種運動狀態,如下圖所示:

另外,我們也可以在這個 App 頂部狀態欄中看到無人機的一些狀態資訊,比如電量、藍牙、速度、高度等,如下圖所示:

我根據 Tello App 的主界面,設計了簡化版的 Blynk 遙控器界面,如下圖所示:
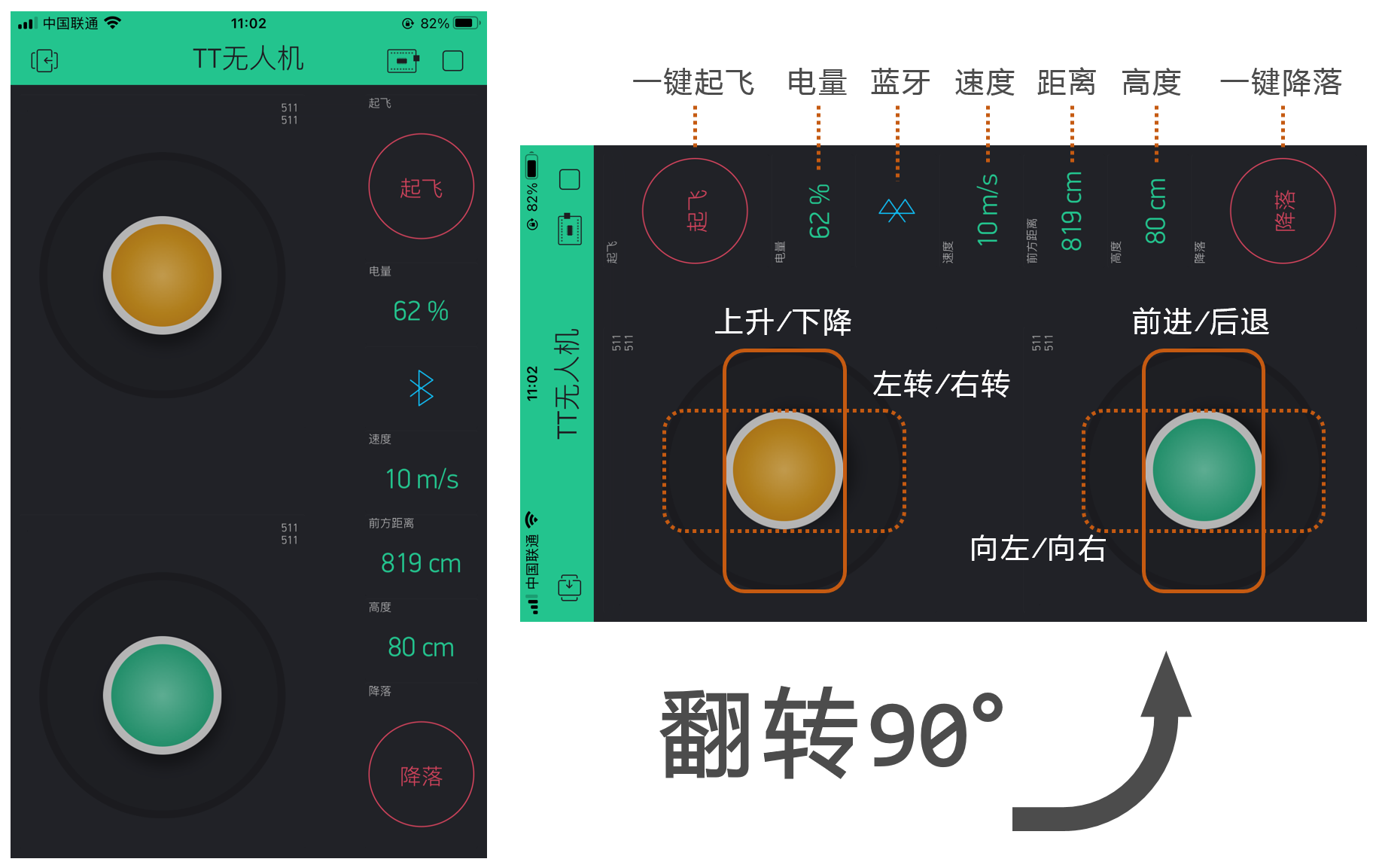
由于 Blynk App 的限制,不支持自動橫屏顯示,所以當我們橫屏操控時,顯示的文字就變成豎直狀態了,但是這絲毫不影響使用,
Mind+程式設計
設計完遙控器界面之后,就開始編程了,打開 Mind+ 軟體,切換到上傳模式,同時在擴展中選擇主控板為 RoboMaster TT(ESP32),如下圖所示:

注意,本專案中使用的 Mind+ 軟體版本為
v1.6.5 RC2.0,隨著軟體升級,未來部分界面與功能可能進行改版,請根據實際情況調整修改,
然后在用戶庫中匯入 Blynk 擴展庫,如下圖所示:

接下來就正式開始編程,首先是 TT 無人機相關的初始化設定與 Blynk 基礎設定:開啟無人機飛行控制,設定 Blynk 為藍牙 BLE 連接模式(方便室外無 WiFi 場景也能使用),將藍牙名稱命名為 RMTT (TT 無人機英文縮寫),初始化完成后在點陣屏顯示 TT 標志,然后在回圈執行中運行 Blynk 相關的行程,

接著定時將 TT 無人機的一些傳感器資訊發送到 Blynk App 中進行顯示,主要包括電量、速度、TOF 測距(前方距離)、高度等,

然后是飛行控制相關的程式,TT 無人機在 Mind+ 中的底層 SDK 提供了兩種控制模式:阻塞式與非阻塞式,本專案中使用的最新的 Mind+ v1.6.5 RC2.0 版本中,圖形化指令呼叫的是阻塞式模式的 SDK,由于 Blynk 需要與服務器“時刻”保持通信,所以阻塞式模式與 Blynk 一起使用時,會導致 Blynk 與服務器的通信中斷,所以本專案中的飛行控制,我們通過直接發送 SDK 控制命令的方式來實作非阻塞式的控制方式,通過查閱 TT 無人機的官方 SDK 手冊,我們可以很容易得到不同飛行狀態對應的指令,如下圖所示:

另外 TT 擴展模塊與 TT 無人機主體之間的通信是通過串口1 進行的,所以編程時只要讓 TT 擴展模塊通過串口1 向 TT 無人機主體發送指令即可,舉個例子,如果要控制 TT 無人機自動起飛,只要發送 [TELLO] takeoff 指令即可;如果要控制 TT 無人機向右飛 30 cm,只要發送 [TELLO] right 30 即可,對應的圖形化指令如下:

了解了 TT 無人機 SDK 指令的發送方式之后,我們就可以正式對 TT 無人機進行飛行控制了,
首先是一鍵起飛與降落,Blynk App 中 V0 編號按鈕,代表起飛控制;V1 編號按鈕代表降落,起飛和降落的時候,顯示相應的向上和鄉下箭頭,起到提示作用,程式如下圖所示:

接著是左搖桿的編程,左搖桿主要用來控制 TT 無人機的向上(U:up)、向下(D:down)、順時針旋轉(大 C:ccw)、逆時針旋轉(小 c:cw),進行相應的飛行任務時,在點陣屏中顯示相應的提示資訊,程式如下圖所示:

右搖桿的編程也是類似道理,右搖桿主要用來控制 TT 無人機的向前(F:forward)、向后(B:back)、向左(L:left)、向右(R:right),同樣也要在點陣屏中顯示相應的提示資訊,程式如下圖所示:

最后我們再增加一個安全防護措施:當 TT 無人機與手機遙控失去連接時(TT 拓展失去連接或者 Blynk 失去連接),讓它自動降落,同時點陣屏顯示 E(Error)提醒用戶,保證安全,程式如下圖所示:

以上就是本專案的完整設計程序,由于篇幅限制,只設計了一個簡單的程式,完整的程式如下圖所示,你也可以對該程式進行修改,添加更加酷炫的功能或者飛行特技,

效果演示
上傳程式到 TT 擴展模塊,一起到戶外去試飛一下吧,演示視頻可回到文章開頭查看,
總結
本次試飛體驗教程到這里就結束了,總體來說,結合大疆完善的飛控技術,和 Mind+ 簡單的編程體驗,只需要通過簡單的圖形化指令拖拽,發送相關的飛行指令,就可以完成復雜的飛行運動控制,上手這款 TT 無人機還是非常容易的,當然本文只是探索了 TT 無人機很簡單的一部分功能,后面有時間,我將為大家解鎖 TT 無人機更多好玩的創意,
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/168359.html
標籤:python
上一篇:樹-1-二叉樹的三種遍歷