1 FPN噪聲介紹
FPN噪聲(Fixed Pattern Noise)簡稱固定模式噪聲,根據FPN噪聲形成機制,分為行FPN和列FPN,
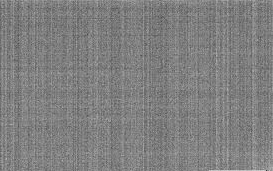
行FPN: 在基于模擬域累加實作的TDI-CMOS影像傳感器中,由于模擬累加器電路中存在寄 生電阻和電容,電路失配會導致輸出影像在TDI(時間延遲積分)掃描方向(即“沿軌”方向) 亮度不均勻,且呈周期性衰減,突出表現為周期性橫條紋,
列FPN:傳感器列并行讀出電路(模擬累加器和ADC(模數轉換器)等)的系統結構由于 工藝偏差很容易出現列與列之間的失配,從而導致輸出影像在與TDI掃描方向垂直的方向 (即“跨軌”方向)亮度不均勻,表現為明暗變化的豎條紋,在TDI-CMOS影像傳感器的輸出影像中,由行FPN導致的橫條紋和由列FPN導致的 豎條紋同時存在且交織在一起.
如下圖所示:
2 FPN噪聲計算
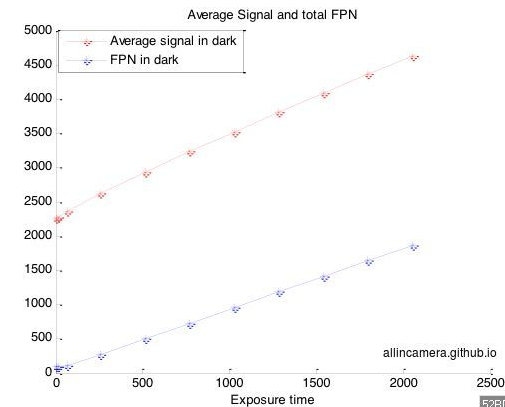
FPN噪聲衡量通常在極低斬訓境下進行,即將相機放置極低斬訓境(或關閉鏡頭光圈,讓sensor采集黑幀),設定多個曝光時間,每個曝光時間采集30張黑幀圖片,FPN噪聲強度用標準差和均值進行衡量,具體實作如下:
exp_time = [0.063, 1.003,16, 64,257,513,770,1027,1283,1540,1797,2054];
raw_avg = 0;
for kk = 0:30:(30*12-1)
for i = 1:30
fname = fileNames{kk+i};
fprintf('processing %s %d\n', fname, kk+i);
raw = double(imread([fold fname]));
raw = raw(:,:,1);
raw_avg = raw + raw_avg;
end
raw_avg = raw_avg./30;
avg_signal((kk/30)+1) = round(mean2(raw_avg)); %FPN均值
fpn_total((kk/30)+1) = std2(raw_avg); %FPN標準差
fpn_col_exp((kk/30)+1) = std(mean(raw_avg,1)); %列FPN均值
fpn_row_exp((kk/30)+1) = std(mean(raw_avg,2)'); %行FPN均值
end
如上計算,可以得到影像的平均信號,每個曝光的FPN noise,以及行,列FPN noise,行列均值,變化如下:
3 FPN校正步驟
略轉載請註明出處,本文鏈接:https://www.uj5u.com/caozuo/208552.html
標籤:嵌入式
上一篇:ISP-黑電平校正(BLC)