一、前言
在uCOS全家桶宣布開源之后被微軟收購的ThreadX也開源了,真是喜大普奔,對于我們這些嵌入式行業從業者來說,能夠學習這些高含金量的代碼對于眼界的開拓和能力的提升都是很有幫助的,ThreadX還包含了NETX、GUIX、FILEX、USBX等豐富的組件,幾乎包含了嵌入式開發中的所有場景,這些組件和ThreadX-RTOS能夠完美的配合完成一條龍的開發,ThreadX的github地址:[Azure RTOS (github.com)]:
二、準備
ThreadX在更新了幾個版本之后已經提供了多個平臺的移植埠,包括AC5、AC6、GCC、IAR,現在可以更方便地移植到各編譯器平臺了,本次移植是在STM32H743 + MDK-AC6 + ThreadX6.1.2下完成,首先使用STM32CubeMX新建一個工程,配置了LED、KEY、UART,然后將下載的ThreadX放在同一工程下(移植用到common和ports/cortex_m7/ac6下的檔案),
三、配置
1、添加檔案及引數
-
工程新增
ThreadX/Port、ThreadX/Src分組,ThreadX/Portf組中添加ports/cortex_m7/ac6/src目錄下所有檔案以及ports\cortex_m7\ac6\example_build\sample_threadx目錄下的tx_initialize_low_level.S檔案;ThreadX/Src組中添加threadx\common\src下所有檔案,添加完成如下圖所示: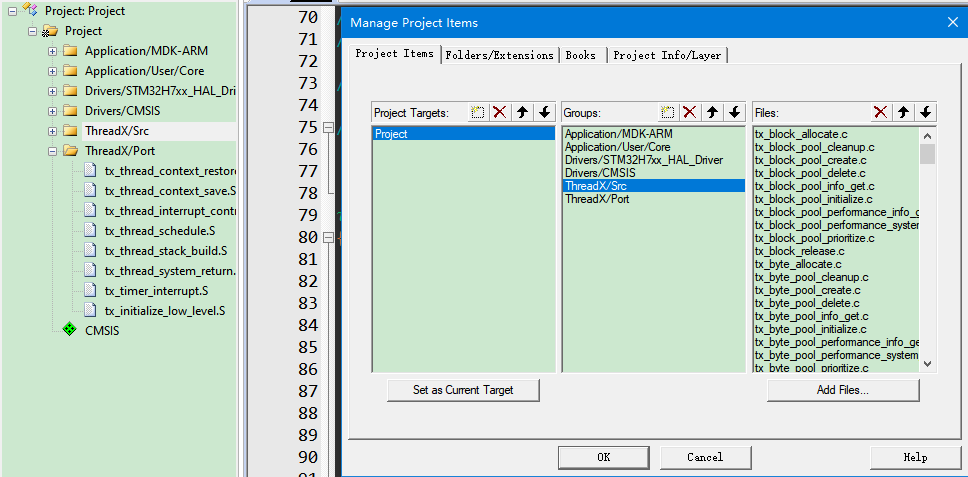
-
配置工程宏定義引數和檔案包含路徑如下所示,
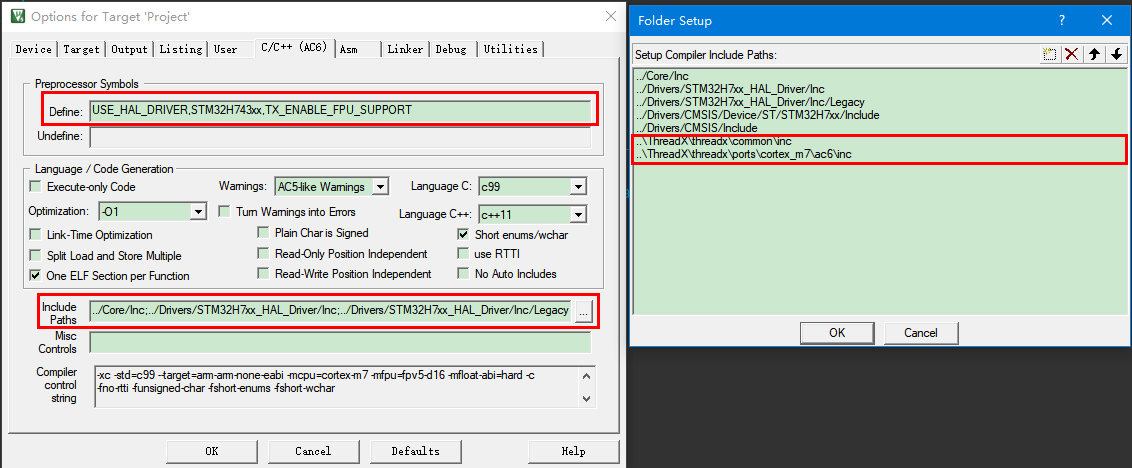
其中USE_HAL_DRIVER和STM32H743xx是使用HAL庫創建工程需要包含的定義,TX_ENABLE_FPU_SUPPORT是使能ThreadX的浮點運算支持需要定義的,在readme_threadx.txt檔案中有如下描述:
If saving the context of the FPU registers
is needed, the ThreadX library should be re-built with TX_ENABLE_FPU_SUPPORT defined.
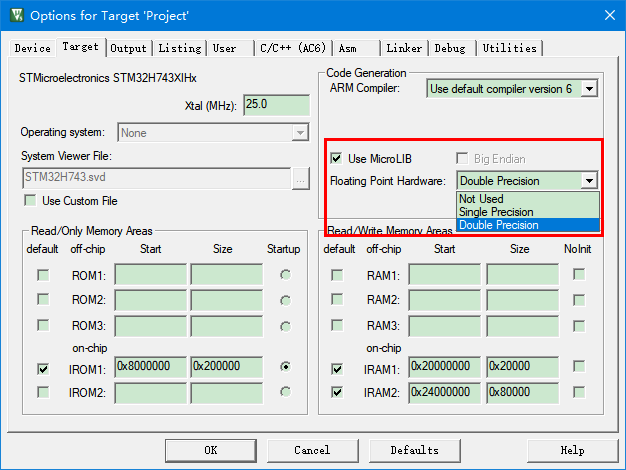
當然要正確的使用硬體浮點運算功能還應該開啟MDK中的如下配置:
2、修改適配檔案
主要是對tx_initialize_low_level.S檔案進行修改,該檔案作用是初始化堆疊地址和向量表、配置系統心跳節拍、配置部分中斷優先級、定義部分中斷處理函式,但是其中有些作業在STM32H743的啟動檔案startup_stm32h743xx.s中已經做了,而STM32啟動檔案所實作的一些功能這個檔案又沒有實作,因為該檔案是針對cortex_m7內核芯片做的,沒有針對具體某一款芯片,所以沒有STM32的啟動檔案實作的功能完善,因此不能替代啟動檔案,這里的修改方法是不動STM32啟動檔案,修改tx_initialize_low_level.S檔案,在此提供兩種修改方案:1、根據沖突修改tx_initialize_low_level.S檔案內容;2、將tx_initialize_low_level.S檔案改為C語言實作(STM32啟動檔案已經實作的不管,只需將ThreadX需要配置的功能用C實作),
-
方案1修改后內容如下(修改處已標注):
@/**************************************************************************/ @/* */ @/* Copyright (c) Microsoft Corporation. All rights reserved. */ @/* */ @/* This software is licensed under the Microsoft Software License */ @/* Terms for Microsoft Azure RTOS. Full text of the license can be */ @/* found in the LICENSE file at https://aka.ms/AzureRTOS_EULA */ @/* and in the root directory of this software. */ @/* */ @/**************************************************************************/ @ @ @/**************************************************************************/ @/**************************************************************************/ @/** */ @/** ThreadX Component */ @/** */ @/** Initialize */ @/** */ @/**************************************************************************/ @/**************************************************************************/ @ @ .global _tx_thread_system_stack_ptr .global _tx_initialize_unused_memory .global _tx_timer_interrupt .global __main .global __tx_SVCallHandler .global __tx_PendSVHandler .global __tx_NMIHandler @ NMI .global __tx_BadHandler @ HardFault .global __tx_SVCallHandler @ SVCall .global __tx_DBGHandler @ Monitor .global __tx_PendSVHandler @ PendSV .global __tx_SysTickHandler @ SysTick .global __tx_IntHandler @ Int 0 @ @ SYSTEM_CLOCK = 480000000 @---modify by user(系統頻率) SYSTICK_CYCLES = ((SYSTEM_CLOCK / 1000) -1) @---modify by user(時鐘節拍) .text 32 .align 4 .syntax unified @/**************************************************************************/ @/* */ @/* FUNCTION RELEASE */ @/* */ @/* _tx_initialize_low_level Cortex-M7/AC6 */ @/* 6.1 */ @/* AUTHOR */ @/* */ @/* William E. Lamie, Microsoft Corporation */ @/* */ @/* DESCRIPTION */ @/* */ @/* This function is responsible for any low-level processor */ @/* initialization, including setting up interrupt vectors, setting */ @/* up a periodic timer interrupt source, saving the system stack */ @/* pointer for use in ISR processing later, and finding the first */ @/* available RAM memory address for tx_application_define. */ @/* */ @/* INPUT */ @/* */ @/* None */ @/* */ @/* OUTPUT */ @/* */ @/* None */ @/* */ @/* CALLS */ @/* */ @/* None */ @/* */ @/* CALLED BY */ @/* */ @/* _tx_initialize_kernel_enter ThreadX entry function */ @/* */ @/* RELEASE HISTORY */ @/* */ @/* DATE NAME DESCRIPTION */ @/* */ @/* 09-30-2020 William E. Lamie Initial Version 6.1 */ @/* */ @/**************************************************************************/ @VOID _tx_initialize_low_level(VOID) @{ .global _tx_initialize_low_level .thumb_func _tx_initialize_low_level: @ @ /* Disable interrupts during ThreadX initialization. */ @ CPSID i @ @ /* Set base of available memory to end of non-initialised RAM area. */ @ LDR r0, =_tx_initialize_unused_memory @ Build address of unused memory pointer LDR r1, =__initial_sp @ Image$$ARM_LIB_STACKHEAP$$ZI$$Limit @ Build first free address ---modify by user ADD r1, r1, #4 @ STR r1, [r0] @ Setup first unused memory pointer @ @ /* Setup Vector Table Offset Register. */ @ MOV r0, #0xE000E000 @ Build address of NVIC registers LDR r1, =__Vectors @ vector_table @ Pickup address of vector table ---modify by user STR r1, [r0, #0xD08] @ Set vector table address @ @ /* Set system stack pointer from vector value. */ @ LDR r0, =_tx_thread_system_stack_ptr @ Build address of system stack pointer LDR r1, =__Vectors @ vector_table @ Pickup address of vector table ---modify by user LDR r1, [r1] @ Pickup reset stack pointer STR r1, [r0] @ Save system stack pointer @ @ /* Enable the cycle count register. */ @ LDR r0, =0xE0001000 @ Build address of DWT register LDR r1, [r0] @ Pickup the current value ORR r1, r1, #1 @ Set the CYCCNTENA bit STR r1, [r0] @ Enable the cycle count register @ @ /* Configure SysTick for 100Hz clock, or 16384 cycles if no reference. */ @ MOV r0, #0xE000E000 @ Build address of NVIC registers LDR r1, =SYSTICK_CYCLES STR r1, [r0, #0x14] @ Setup SysTick Reload Value MOV r1, #0x7 @ Build SysTick Control Enable Value STR r1, [r0, #0x10] @ Setup SysTick Control @ @ /* Configure handler priorities. */ @ LDR r1, =0x00000000 @ Rsrv, UsgF, BusF, MemM STR r1, [r0, #0xD18] @ Setup System Handlers 4-7 Priority Registers LDR r1, =0xFF000000 @ SVCl, Rsrv, Rsrv, Rsrv STR r1, [r0, #0xD1C] @ Setup System Handlers 8-11 Priority Registers @ Note: SVC must be lowest priority, which is 0xFF LDR r1, =0x40FF0000 @ SysT, PnSV, Rsrv, DbgM STR r1, [r0, #0xD20] @ Setup System Handlers 12-15 Priority Registers @ Note: PnSV must be lowest priority, which is 0xFF @ @ /* Return to caller. */ @ BX lr @} @ @/* Define shells for each of the unused vectors. */ @ .global __tx_BadHandler .thumb_func __tx_BadHandler: B __tx_BadHandler @ /* added to catch the hardfault */ .global __tx_HardfaultHandler .thumb_func __tx_HardfaultHandler: B __tx_HardfaultHandler @ /* added to catch the SVC */ .global __tx_SVCallHandler .thumb_func __tx_SVCallHandler: B __tx_SVCallHandler @ /* Generic interrupt handler template */ .global __tx_IntHandler .thumb_func __tx_IntHandler: @ VOID InterruptHandler (VOID) @ { PUSH {r0, lr} #ifdef TX_ENABLE_EXECUTION_CHANGE_NOTIFY BL _tx_execution_isr_enter @ Call the ISR enter function #endif @ /* Do interrupt handler work here */ @ /* BL <your C Function>.... */ #ifdef TX_ENABLE_EXECUTION_CHANGE_NOTIFY BL _tx_execution_isr_exit @ Call the ISR exit function #endif POP {r0, lr} BX LR @ } @ /* System Tick timer interrupt handler */ .global __tx_SysTickHandler .global SysTick_Handler .thumb_func __tx_SysTickHandler: .thumb_func SysTick_Handler: @ VOID TimerInterruptHandler (VOID) @ { @ PUSH {r0, lr} #ifdef TX_ENABLE_EXECUTION_CHANGE_NOTIFY BL _tx_execution_isr_enter @ Call the ISR enter function #endif BL _tx_timer_interrupt #ifdef TX_ENABLE_EXECUTION_CHANGE_NOTIFY BL _tx_execution_isr_exit @ Call the ISR exit function #endif POP {r0, lr} BX LR @ } @ /* NMI, DBG handlers */ .global __tx_NMIHandler .thumb_func __tx_NMIHandler: B __tx_NMIHandler .global __tx_DBGHandler .thumb_func __tx_DBGHandler: B __tx_DBGHandler -
方案2修改內容如下(工程中用該檔案
tx_initialize_low_level.C替換tx_initialize_low_level.S檔案)#include "stm32h7xx_hal.h" #include "tx_api.h" static const uint32_t SYSTEM_CLOCK = 480000000; static const uint32_t SYSTICK_CYCLES = ((SYSTEM_CLOCK / 1000) -1); extern void _tx_timer_interrupt(void); /*in "tx_timer_interrupt.S" file*/ void _tx_initialize_low_level(void) { /* Disable interrupts during ThreadX initialization. */ __set_PRIMASK(1); /* Configure SysTick for 1000Hz clock, or 16384 cycles if no reference. */ SysTick_Config(SYSTICK_CYCLES); /* Configure handler priorities. */ HAL_NVIC_SetPriority(SVCall_IRQn, 15, 0); /*Note: SVC must be lowest priority*/ HAL_NVIC_EnableIRQ(SVCall_IRQn); HAL_NVIC_SetPriority(PendSV_IRQn, 15, 0); HAL_NVIC_EnableIRQ(PendSV_IRQn); /*Note: PnSV must be lowest priority*/ HAL_NVIC_SetPriority(SysTick_IRQn, 4, 0); HAL_NVIC_EnableIRQ(SysTick_IRQn); } /* System Tick timer interrupt handler */ void SysTick_Handler (void) { /*BL _tx_timer_interrupt*/ _tx_timer_interrupt(); }
通過上述修改檔案可見ThreadX修改底層移植檔案的內容并不多,移植還是比較方便,
最后將stm32h7xx_it.c檔案中的PendSV_Handler和SysTick_Handler中斷處理函式屏蔽(前者用于實作RTOS的任務調度,后者用于實作RTOS的心跳節拍),
#ifndef ENABLE_RTOS
void PendSV_Handler(void)
{
}
void SysTick_Handler(void)
{
}
#endif
四、測驗
經過上述步驟,工程編譯已經沒有錯誤,接下來就是創建任務測驗ThreadX能否正常運行起來,
在threadx\ports\cortex_m7\ac6\example_build\sample_threadx下的sample_threadx.c檔案中演示了任務的創建,依葫蘆畫瓢創建自己的任務即可,main.c檔案內容如下:
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include "tx_api.h"
#define DEMO_STACK_SIZE (2 * 1024)
#define DEMO_BYTE_POOL_SIZE (32 * 1024)
TX_BYTE_POOL byte_pool_0;
UCHAR memory_area[DEMO_BYTE_POOL_SIZE];
TX_THREAD thread_0;
TX_THREAD thread_1;
TX_THREAD thread_2;
void thread_0_entry(ULONG thread_input);
void thread_1_entry(ULONG thread_input);
void thread_2_entry(ULONG thread_input);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
while (1)
{
tx_kernel_enter();
}
}
void tx_application_define(void *first_unused_memory)
{
CHAR *pointer = TX_NULL;
/* Create a byte memory pool from which to allocate the thread stacks. */
tx_byte_pool_create(&byte_pool_0, "byte pool 0", memory_area, DEMO_BYTE_POOL_SIZE);
/* Allocate the stack for thread 0. */
tx_byte_allocate(&byte_pool_0, (VOID **) &pointer, DEMO_STACK_SIZE, TX_NO_WAIT);
/* Create the main thread. */
tx_thread_create(&thread_0, "thread 0", thread_0_entry, 0,
pointer, DEMO_STACK_SIZE,
1, 1, TX_NO_TIME_SLICE, TX_AUTO_START);
/* Allocate the stack for thread 1. */
tx_byte_allocate(&byte_pool_0, (VOID **) &pointer, DEMO_STACK_SIZE, TX_NO_WAIT);
/* Create threads 1 */
tx_thread_create(&thread_1, "thread 1", thread_1_entry, 0,
pointer, DEMO_STACK_SIZE,
2, 2, TX_NO_TIME_SLICE, TX_AUTO_START);
/* Allocate the stack for thread 2. */
tx_byte_allocate(&byte_pool_0, (VOID **) &pointer, DEMO_STACK_SIZE, TX_NO_WAIT);
/* Create threads 1 */
tx_thread_create(&thread_2, "thread 2", thread_2_entry, 0,
pointer, DEMO_STACK_SIZE,
3, 3, TX_NO_TIME_SLICE, TX_AUTO_START);
}
void thread_0_entry(ULONG thread_input)
{
while(1)
{
HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin);
tx_thread_sleep(200);
}
}
void thread_1_entry(ULONG thread_input)
{
while(1)
{
HAL_GPIO_TogglePin(LED2_GPIO_Port,LED2_Pin);
tx_thread_sleep(200);
}
}
void thread_2_entry(ULONG thread_input)
{
double a = 0.1, b = 1.0;
while(1)
{
a += 0.00000000001;
b -= 0.00000000001;
printf("floating test:\ta = %.11f, b = %.11f\r\n", a, b);
tx_thread_sleep(2000);
}
}
到這里,任務就正常運行起來了,
補充
任務創建函式說明
- 引數:
- thread_ptr:指向執行緒控制塊的指標
- name_ptr :指向執行緒名稱的指標
- entry_function:指定用于執行緒執行的初始C函式, 當執行緒從此入口函式回傳時,它將處于完成狀態并無限期掛起,
- entry_input:首次執行時傳遞給執行緒的入口函式的32位值, 此輸入的使用完全由應用程式確定
- stack_start:堆疊記憶體區域的起始地址
- stack_size:堆疊記憶體區中的位元組數
- priority:執行緒的優先級, 有效值的范圍是0 ~(TX_MAX_PRIORITES-1),其中0表示最高優先級
- preempt_threshold:禁用的搶占的最高優先級, 只有高于此級別的優先級才可以搶占該執行緒,該值必須小于或等于指定的優先級,等于執行緒優先級的值將禁用搶占閾值
- time_slice:在其他具有相同優先級的就緒執行緒有機會運行之前,允許此執行緒運行的時鐘節拍數,請注意,使用搶占閾值將禁用時間片,合法的時間片值范圍從1到0xffffff (包括),TX_NO_TIME_SLICE (值為0)禁用此執行緒的時間片,(使用時間片會導致少量的系統開銷,由于時間片僅在多個執行緒共享相同優先級的情況下有用,因此不應為具有唯一優先級的執行緒分配時間片)
- auto_start:指定執行緒是立即啟動還是處于暫停狀態,指定選項是TX_AUTO_START (0x01)和 TX_DONT_START (0x00),如果指定了TX_DONT_START,則應用程式必須呼叫 tx_thread_resume 才能使執行緒運行,
- 回傳值
- TX_SUCCESS (0x00):執行緒創建成功
- TX_THREAD_ERROR (0x0E):無效的執行緒控制指標,指標為 NULL 或執行緒已創建
- TX_PTR_ERROR (0x03):入口點的起始地址無效或堆疊區域無效,通常為 NULL,
- TX_SIZE_ERROR (0x05):堆疊區域的大小無效, 執行緒必須至少具有TX_MINIMUM_STACK位元組才能執行,
- TX_PRIORITY_ERROR (0x0F):無效的執行緒優先級,該值超出(0 ~(TX_MAX_PRIORITIES-1))的范圍,
- TX_THRESH_ERROR (0x18):指定的搶占閾值無效, 該值的有效優先級必須小于或等于執行緒的初始優先級,
- TX_START_ERROR (0x10):自動啟動選擇無效
- TX_CALLER_ERROR (0x13):該服務的呼叫者無效
UINT tx_thread_create(
TX_THREAD *thread_ptr,
CHAR *name_ptr,
VOID (*entry_function)(ULONG),
ULONG entry_input,
VOID *stack_start,
ULONG stack_size,
UINT priority,
UINT preempt_threshold,
ULONG time_slice,
UINT auto_start);
轉載請註明出處,本文鏈接:https://www.uj5u.com/caozuo/233749.html
標籤:嵌入式