以太網驅動流程淺析(三)-ifconfig的-19錯誤最底層分析
**Author:張昺華
Email:[email protected]
Time:2019年3月23日星期六
**
此文也在我的個人公眾號以及《Linux內核之旅》上有發表:以太網驅動流程淺析(三)-ifconfig的-19錯誤最底層分析
很喜歡一群人在研究技術,一起做有意思的東西,一起分享技術帶給我們的快樂,也希望中國有更多的人熱愛技術,喜歡一起研究、分享技術,然后可以一起用我們的技術來做一些好玩的東西,可以為這個社會創造一些東西來改善人們的生活,
如下是本人除錯程序中的一點經驗分享,以太網驅動架構畢竟涉及的東西太多,如下僅僅是針對加載流程和圍繞這個問題產生的分析程序和驅動加載流程部分,并不涉及以太網協議層的資料流程分析,
【硬體環境】 Imx6ul
【Linux kernel版本】 Linux4.1.15
【以太網phy】 Realtek8201f
1. 以太網流程分析跟蹤
1.1 ifconfig的-19錯誤最底層分析
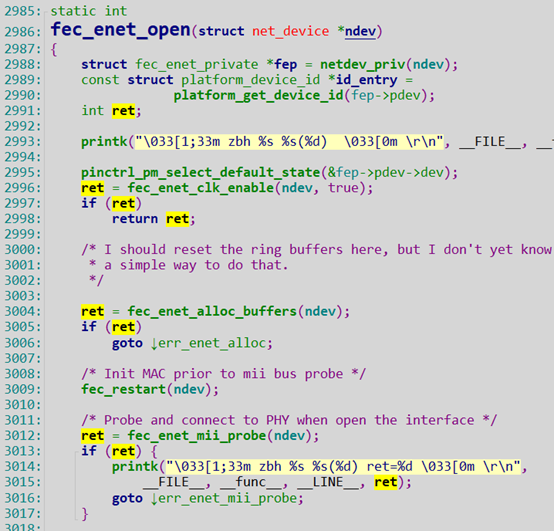
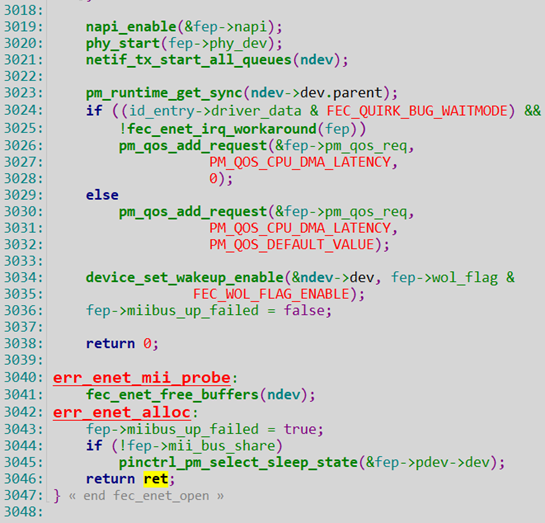
看了后我們知道是fec_enet_mii_probe函式回傳的-19,繼續跟蹤進去:
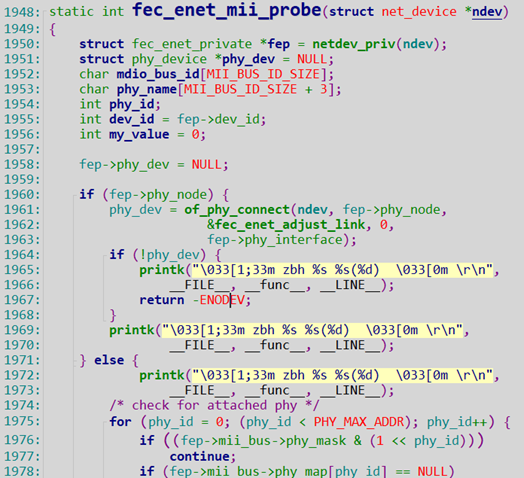

哈哈,看到這里答案出來了,-19就是這里回傳的,也就是說phy_dev是NULL
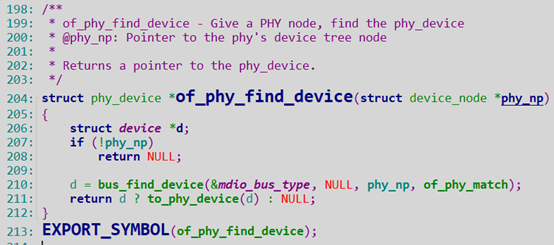
那為什么呢?我們跟進去看下,of_phy_connect,功能注釋已經寫的很清楚了
Connect to the phy described in the device tree,從設備樹上獲取phy的相關描述資訊,路徑:drivers/of/of_mdio.c
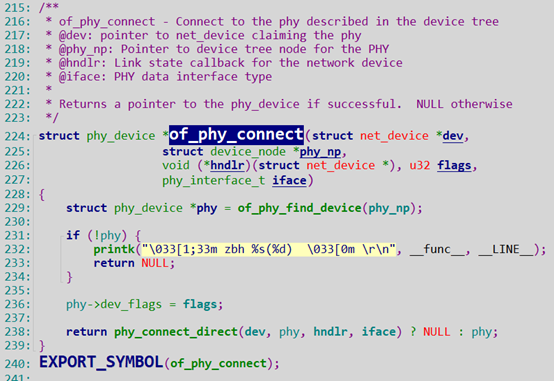
既然phy_device是空的,也就是說struct phy_device *phy = of_phy_find_device(phy_np);
沒有從這里面拿到phy_device
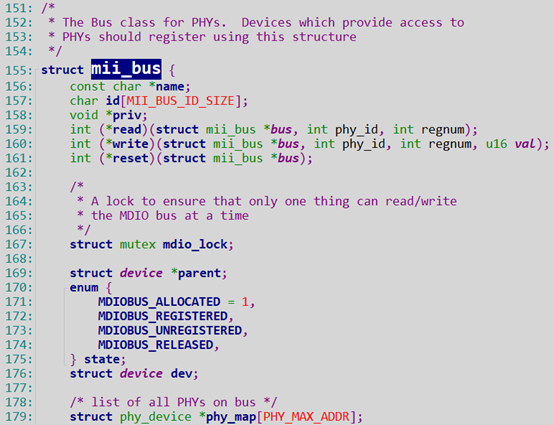
看下如下兩個函式
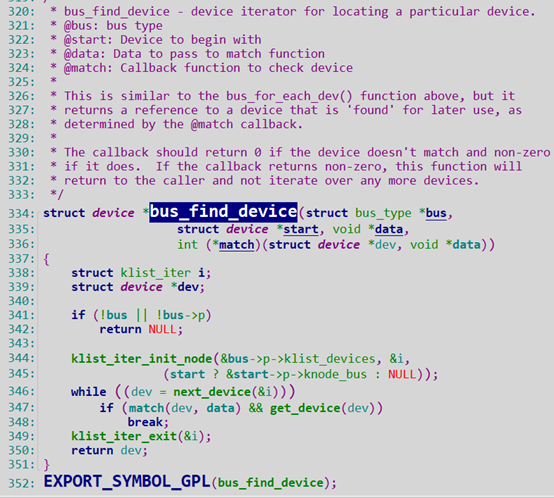

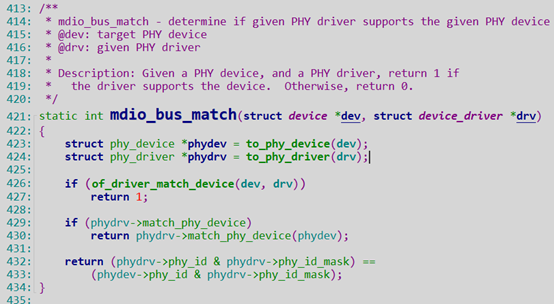
這里我需要解釋下了,bus_find_device(&mdio_bus_type, NULL, phy_np, of_phy_match);
從bus總線上找到device,也就是我們的phy_device,


如果找到就回傳phy_device,否則就回傳NULL
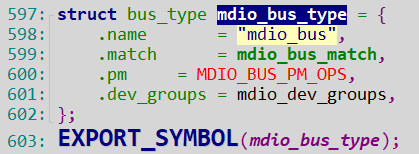
這個bus是指mdio_bus_type,如下:
1.2 以太網硬體知識
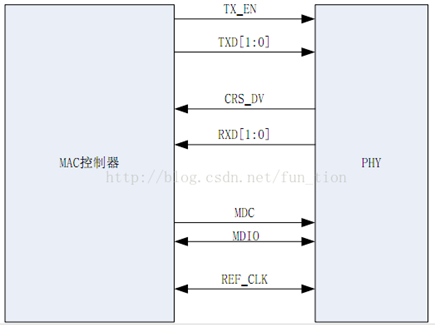
那mdio又是什么呢?這就是以太網的知識了,我們看下以太網的硬體接法:
如下內容轉自:https://blog.csdn.net/fun_tion/article/details/70270632
1.概述
MII即“媒體獨立介面”,也叫“獨立于介質的介面”,它是IEEE-802.3定義的以太網行業標準,它包括一個資料介面,以及一個MAC和PHY之間的管理介面,RMII全稱為“簡化的媒體獨立介面”,是IEEE-802.3u標準中除MII介面之外的另一種實作,(此處內容來源于網路)
2.獨立于介質的介面(MII)
獨立于介質的介面(MII)用于MAC與外接的PHY互聯,支持10Mbit/s和100Mbit/s資料傳輸模式,MII的信號線如下圖所示:
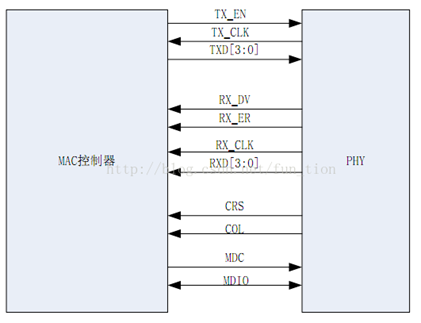
MII_TX_CLK:發送資料使用的時鐘信號,對于10M位/s的資料傳輸,此時鐘為2.5MHz,對于100M位/s的資料傳輸,此時鐘為25MHz,
MII_RX_CLK:接收資料使用的時鐘信號,對于10M位/s的資料傳輸,此時鐘為2.5MHz,對于100M位/s的資料傳輸,此時鐘為25MHz,
MII_TX_EN:傳輸使能信號,此信號必需與資料前導符的起始位同步出現,并在傳輸完畢前一直保持,
MII_TXD[3:0]:發送資料線,每次傳輸4位資料,資料在MII_TX_EN信號有效時有效,MII_TXD[0]是資料的最低位,MII_TXD[3]是最高位,當MII_TX_EN信號無效時,PHY忽略傳輸的資料,
MII_CRS:載波偵聽信號,僅作業在半雙工模式下,由PHY控制,當發送或接收的介質非空閑時,使能此信號, PHY必需保證MII_CRS信號在發生沖突的整個時間段內都保持有效,不需要此信號與發送/接收的時鐘同步,
MII_COL:沖突檢測信號,僅作業在半雙工模式下,由PHY控制,當檢測到介質發生沖突時,使能此信號,并且在整個沖突的持續時間內,保持此信號有效,此信號不需要和發送/接收的時鐘同步,
MII_RXD[3:0]:接收資料線,每次接收4位資料,資料在MII_RX_DV信號有效時有效,MII_RXD[0]是資料的最低位,MII_RXD[3]是最高位,當MII_RX_EN無效,而MII_RX_ER有效時,MII_RXD[3:0]資料值代表特定的資訊(請參考表194),
MII_RX_DV:接收資料使能信號,由PHY控制,當PHY準備好資料供MAC接收時,使能該信號,此信號必需和幀資料的首位同步出現,并保持有效直到資料傳輸完成,在傳送最后4位資料后的第一個時鐘之前,此信號必需變為無效狀態,為了正確的接收一個幀,有效電平不能滯后于資料線上的SFD位出現,
MII_RX_ER:接收出錯信號,保持一個或多個時鐘周期(MII_RX_CLK)的有效狀態,表明MAC在接收程序中檢測到錯誤,具體錯誤原因需配合MII_RX_DV的狀態及MII_RXD[3:0]的資料值,
3.精簡的獨立于介質的介面(RMII)
精簡的獨立于介質介面(RMII)規范減少了以太網通信所需要的引腳數,根據IEEE802.3標準,MII介面需要16個資料和控制信號引腳,而RMII標準則將引腳數減少到了7個,RMII具有以下特性:
時鐘信號需要提高到50MHz,
MAC和外部的以太網PHY需要使用同樣的時鐘源
使用2位寬度的資料收發
RMII的信號線如下圖所示:
**
如上內容轉自:https://blog.csdn.net/fun_tion/article/details/70270632
**
1.3 Mdio總線沒有找到phy_device
接下來回歸到軟體層面,那以太網的通信收發資料包就是使用MDC/MDIO這樣的硬體介面
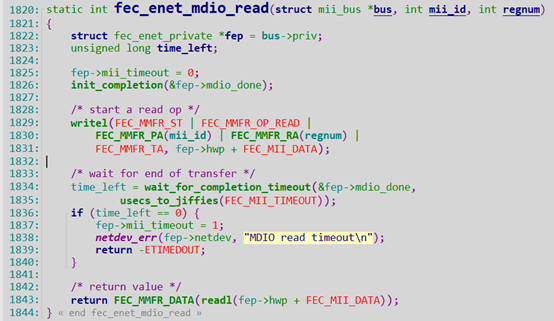
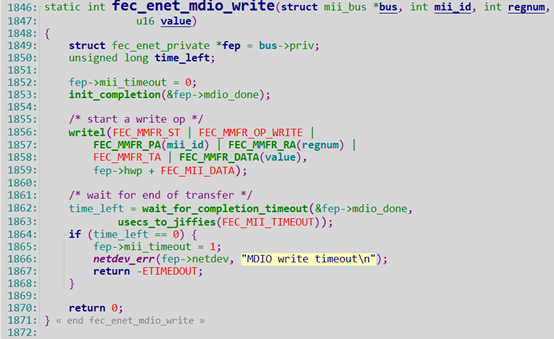
軟體的介面是:mdiobus_read與mdiobus_write
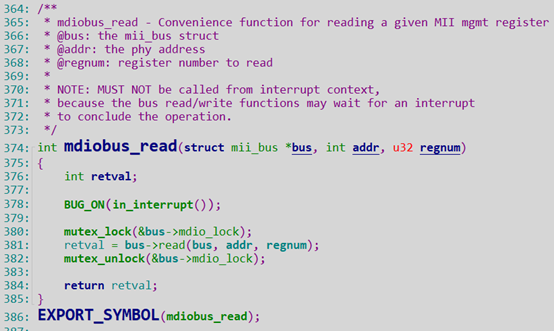
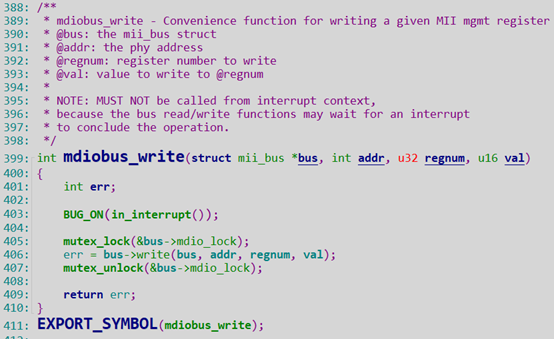
那這塊最終的read / write的實作函式在哪里呢?去以太網控制器drvier里看就好了fec_main.c中:
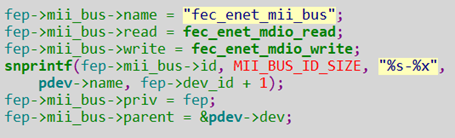
回歸到剛剛的-19錯誤最終發現是phy_device為NULL了,也就是在mdio bus上沒有找到對應的phy_device,那么從這里我們可以猜想注冊的時候是否根本就沒注冊進去呢?或者是注冊成功了后,在某個階段phy_device消失了?帶著這個疑問我們就要看下以太網控制器加載的流程了,
4. 網址分享
http://stackoverflow.com/questions/5308090/set-ip-address-using-siocsifaddr-ioctl
http://www.ibm.com/support/knowledgecenter/ssw_aix_72/com.ibm.aix.commtrf2/ioctl_socket_control_operations.htm
https://lkml.org/lkml/2017/2/3/396
linux PHY驅動
http://www.latelee.org/programming-under-linux/linux-phy-driver.html
Linux PHY幾個狀態的跟蹤
http://www.latelee.org/programming-under-linux/linux-phy-state.html
第十六章PHY -基于Linux3.10
https://blog.csdn.net/shichaog/article/details/44682931
### End轉載請註明出處,本文鏈接:https://www.uj5u.com/caozuo/24221.html
標籤:嵌入式