大家好,我是痞子衡,是正經搞技術的痞子,今天痞子衡給大家介紹的是i.MXRT上使能NOR Flash的Continuous read模式在軟復位后無法正常啟動問題的解決經驗,
前一篇文章 《在i.MXRT啟動頭FDCB里使能串行NOR Flash的Continuous read模式》 里,痞子衡簡單介紹了Flash的Continuous read模式作用與意義,并且在MIMXRT1170-EVK上嘗試使能了芯成IS25WP128的Continuous read模式做了一次實踐(主要是文中第三節FDCB啟動頭的改動),
但其實在i.MXRT上使能Flash的Continuous read模式是有點小陷阱的,如果你在App代碼里直接插一句 NVIC_SystemReset() 函式的呼叫,即對主控芯片做一次軟復位,你會發現芯片沒有從Flash正常啟動,這是因為Flash此時仍處于Continuous read模式,這種情況下BootROM有時不能正常配置讀取Flash內容去啟動App,今天痞子衡就來跟大家探討解決這個問題,
- 本系列會有多篇文章,每篇文章均從一個核心切入點出發,給出一系列具體實作方案,
- 本系列均以MIMXRT1170-EVK板為示例目標物件,板載Flash型號為芯成IS25WP128(其他i.MXRT芯片和Flash型號下實作流程也差不多,需查看對應資料手冊),
一、解決思路
我們知道無法啟動問題是由于主芯片發生軟復位但Flash仍處于Continuous read模式造成的,要解決這個問題無非如下三個角度,痞子衡會在后面具體實作方案里按這些角度全部搞一次(如果適用的話),
- 一、ROM方面不做任何相關處理,但App在呼叫NVIC_SystemReset()做復位前將Flash先切回到Normal模式;
- 二、App方面不做任何相關處理,對BootROM相關配置做一些調整,讓BootROM也能正常處理處于Continuous read模式的Flash;
- 三、ROM和App聯合對Flash模式切換做一些特殊處理,
二、核心切入點(借助Flash的硬復位引腳功能)
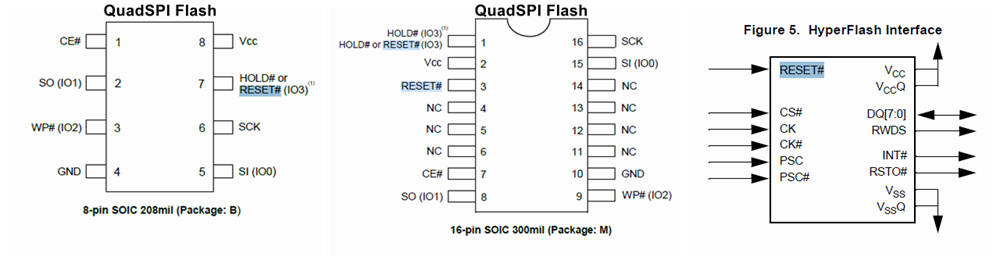
本文找的核心切入點是利用Flash的硬體復位引腳,Flash的硬體復位引腳有兩種:一種是獨立的,常見于SOIC-16封裝上(這種情況下對板級設計有要求,需要在板級設計時將Flash復位引腳連到主芯片i.MXRT的GPIO上);另一種是復用在IO3上的,常用于SOIC-8封裝上,
如果是獨立的復位引腳(RESET#),則主芯片GPIO直接做拉低操作即可(注意低電平持續時間的要求,詳見Flash資料手冊);如果是復用的復位引腳(RESET#/IO3),則需要先激活IO3的復位功能,然后做拉低操作,
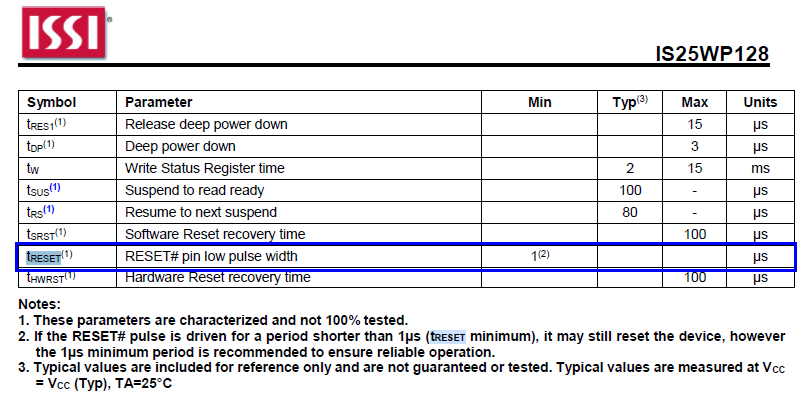
在IS25WP128資料手冊里可以找到RESET#信號低電平至少需要持續1us(下表tRESET,如果RESET#低電平持續時間小于1us,也許不會影響Flash器件的復位,但不推薦),Flash進入復位后需要最大100us的恢復時間(下表tHWRST),在恢復期間內對Flash進行讀寫擦操作并不會生效,因此復位函式里(下文3.2節里的reset_flash_via_pin)最好保證足夠的等待時間(這樣后續代碼里的Flash操作可靠性就得到了保證),
三、具體實作
本章節描述的方法,如果是在App里(這里均指XIP App)完成,那么App里增加的相關處理代碼(注意是執行到的全部代碼)需要是 ramfunc 屬性(即運行在內部RAM里),這樣操作Flash時可以不受限制,此外代碼運行前需要把全域中斷關掉,防止執行程序中有中斷觸發,導致Flash里的相關IRQHandler函式被執行,
#if (defined(__ICCARM__))
__ramfunc
#endif
void reset_flash_to_normal(void)
{
__disable_irq();
// 處理代碼,使Flash回傳到Normal模式
NVIC_SystemReset();
}
3.1 僅ROM方面做相關處理
我們先僅從ROM單方面角度來解決問題,可以先看下痞子衡之前的舊文 《深入i.MXRT1050系列ROM中串行NOR Flash啟動初始化流程》 里的2.1節,i.MXRT全系列ROM里關于串行NOR Flash啟動流程大同小異,
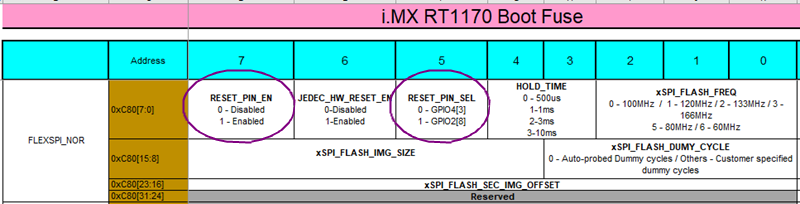
如果要利用ROM里集成的Flash硬體復位功能,則Flash本身必須包含獨立的硬體RESET#引腳,本系列示例主芯片i.MXRT1170的fusemap表里關于RESET_PIN的相關定義如下,那么板級設計時Flash RESET#引腳應該連接到GPIO4[3]或者GPIO2[8](根據fuse 0xC80[5]位而定),并且我們還要將fuse 0xC80[7]位燒寫為1,
3.2 僅App方面做相關處理
上一小節里的方法先決條件是Flash要包含獨立RESET#引腳,但實際客戶專案中SOIC-8封裝的Flash選擇更多,所以我們更多應該在復用的RESET#/IO3引腳上做文章,這就要從App方面的角度來解決問題了,
我們先從IS25WP128資料手冊看看RESET#/IO3引腳詳細功能解釋,主要如下兩點:
1. IO3引腳僅當QE模式不使能(Flash內部Status Register[6] = 0)的時候,其功能才是HOLD#/RESET#
2. IO3引腳復用功能HOLD#/RESET#由Flash內部Read Register[7]位決定,默認值為0,是HOLD#功能
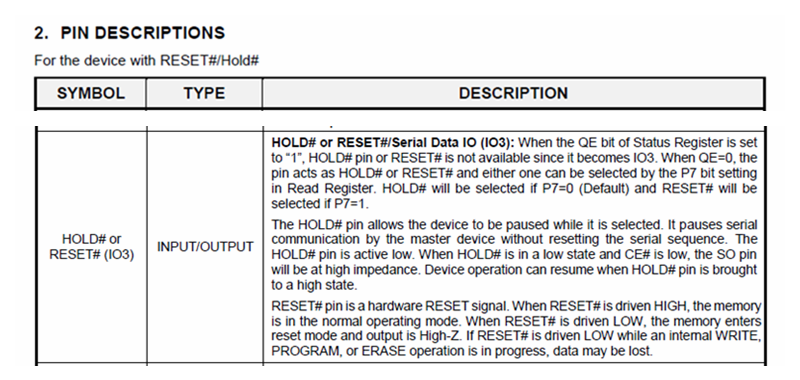
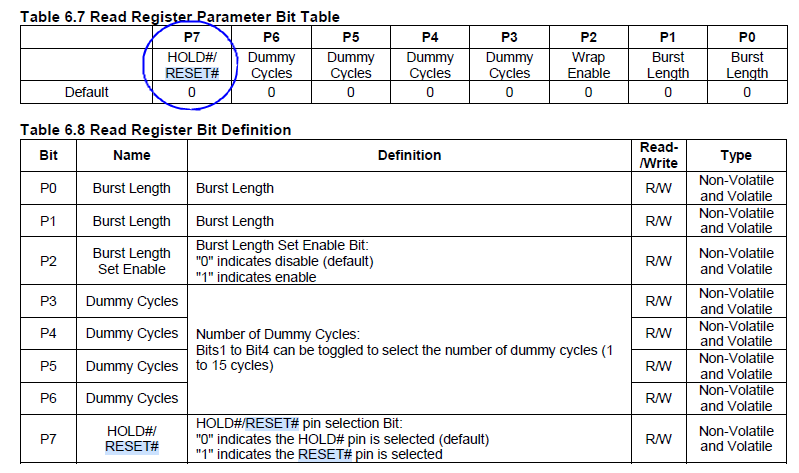
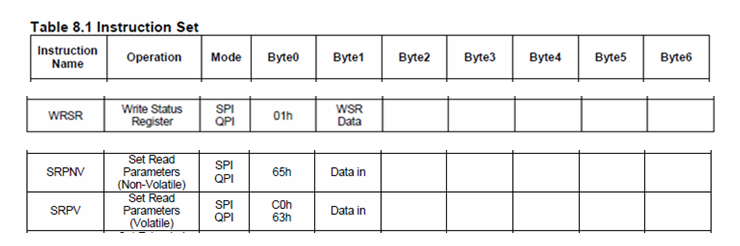
所以 reset_flash_to_normal() 函式里我們需要先設Status Register將Flash切到QE不使能的狀態(i.MXRT啟動運行App時,Flash應處于QE使能的狀態),然后再設Read Register將IO3復位功能指定為RESET#,然后拉低IO3對應的GPIO直到滿足復位最小時間要求,最后再將之前改寫的Status Register/Read Register全部恢復,程序中主要涉及如下命令:
代碼可以基于 \SDK_2.9.1_MIMXRT1170-EVK\boards\evkmimxrt1170\driver_examples\flexspi\nor\polling_transfer\cm7下面的 flexspi_nor_polling_transfer.c 和 flexspi_nor_flash_ops.c,并新增如下代碼:
#define NOR_CMD_LUT_SEQ_IDX_WRITESTATUSREG 9
#define NOR_CMD_LUT_SEQ_IDX_SETREADPARAM 14
const uint32_t customLUT[CUSTOM_LUT_LENGTH] = {
// ...
/* 原來 Write Status Register */
[4 * NOR_CMD_LUT_SEQ_IDX_WRITESTATUSREG] =
FLEXSPI_LUT_SEQ(kFLEXSPI_Command_SDR, kFLEXSPI_1PAD, 0x01, kFLEXSPI_Command_WRITE_SDR, kFLEXSPI_1PAD, 0x04),
// 新增 Set read parameter
[4 * NOR_CMD_LUT_SEQ_IDX_SETREADPARAM] =
FLEXSPI_LUT_SEQ(kFLEXSPI_Command_SDR, kFLEXSPI_1PAD, 0x63, kFLEXSPI_Command_WRITE_SDR, kFLEXSPI_1PAD, 0x04),
};
status_t flexspi_nor_set_flash_register(FLEXSPI_Type *base, uint32_t seqIdx, uint32_t regValue)
{
flexspi_transfer_t flashXfer;
status_t status;
uint32_t writeValue = https://www.cnblogs.com/henjay724/p/regValue;
/* Write enable */
status = flexspi_nor_write_enable(base, 0);
if (status != kStatus_Success)
{
return status;
}
flashXfer.deviceAddress = 0;
flashXfer.port = kFLEXSPI_PortA1;
flashXfer.cmdType = kFLEXSPI_Write;
flashXfer.SeqNumber = 1;
flashXfer.seqIndex = seqIdx;
flashXfer.data = &writeValue;
flashXfer.dataSize = 1;
status = FLEXSPI_TransferBlocking(base, &flashXfer);
if (status != kStatus_Success)
{
return status;
}
status = flexspi_nor_wait_bus_busy(base);
/* Do software reset. */
FLEXSPI_SoftwareReset(base);
return status;
}
// MIMXRT1170-EVK上GPIO10[20]引腳連到了Flash的IO3上
void reset_flash_via_pin(void)
{
gpio_pin_config_t gpio_config = {
.direction = kGPIO_DigitalOutput,
.outputLogic = 0U,
.interruptMode = kGPIO_NoIntmode
};
GPIO_PinInit(GPIO10, 20U, &gpio_config);
IOMUXC_SetPinMux(IOMUXC_GPIO_SD_B2_11_GPIO10_IO20, 0U);
// Pin拉高
GPIO_PinWrite(GPIO10, 20U, 1U);
SDK_DelayAtLeastUs(10, SystemCoreClock);
// Pin拉低10us(需持續至少tRESET = 1us時間)
GPIO_PinWrite(GPIO10, 20U, 0U);
SDK_DelayAtLeastUs(10, SystemCoreClock);
// Pin拉高(需持續最大tHWRST = 100us時間)
GPIO_PinWrite(GPIO10, 20U, 1U);
SDK_DelayAtLeastUs(100, SystemCoreClock);
}
void reset_flash_to_normal(void)
{
__disable_irq();
flexspi_nor_flash_init(EXAMPLE_FLEXSPI);
// Disable quad mode.
flexspi_nor_set_flash_register(EXAMPLE_FLEXSPI, NOR_CMD_LUT_SEQ_IDX_WRITESTATUSREG, 0x00);
// Set IO3 pin to Reset func
flexspi_nor_set_flash_register(EXAMPLE_FLEXSPI, NOR_CMD_LUT_SEQ_IDX_SETREADPARAM, 0x80);
// Drive IO3 to low for at least 1us
reset_flash_via_pin();
// Set back IO3 pin func
flexspi_nor_set_flash_register(EXAMPLE_FLEXSPI, NOR_CMD_LUT_SEQ_IDX_SETREADPARAM, 0x00);
// Enter quad mode.
flexspi_nor_set_flash_register(EXAMPLE_FLEXSPI, NOR_CMD_LUT_SEQ_IDX_WRITESTATUSREG, 0x40);
NVIC_SystemReset();
}
為了保證上述代碼均執行在RAM里,工程鏈接檔案里(以IAR示例)需做如下改動:
initialize by copy { readwrite,
section .textrw,
object fsl_common.o,
object I64DivZer.o,
object I64DivMod.o,
object fsl_gpio.o,
object fsl_flexspi.o,
object flexspi_nor_flash_ops.o,
object flexspi_nor_polling_transfer.o,
section CodeQuickAccess };
3.3 ROM和App聯合處理
關于ROM和App聯合處理角度,在復位引腳這個切入點上并沒有什么優勢,此處略去,
至此,i.MXRT上使能NOR Flash的Continuous read模式在軟復位后無法正常啟動問題的解決經驗痞子衡便介紹完畢了,掌聲在哪里~~~
歡迎訂閱
文章會同時發布到我的 博客園主頁、CSDN主頁、知乎主頁、微信公眾號 平臺上,
微信搜索"痞子衡嵌入式"或者掃描下面二維碼,就可以在手機上第一時間看了哦,

轉載請註明出處,本文鏈接:https://www.uj5u.com/caozuo/285461.html
標籤:嵌入式
上一篇:痞子衡嵌入式:MCUBootUtility v3.3發布,可配合SBL專案使用
下一篇:痞子衡嵌入式:串行NOR Flash的Continuous read模式下軟復位后i.MXRT無法啟動問題解決方案之SW Reset