01、示波器
測量一段代碼運行時間第一時間想到的當然是示波器了,在測量開始的代碼前面拉高某個GPIO,在結束測量的位置拉低這個GPIO,直接使用示波器查看這個GPIO的高電平時間長度即可,就是我們要測量的這段代碼的運行時間,
那么直接上示例,為了模擬代碼運行一段時間,這里我直接采用之前文章《STM32的四種延時方法》直接延時,
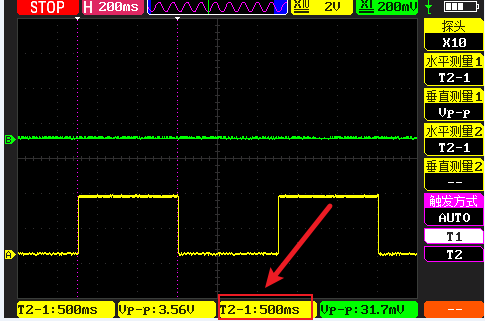
while (1) { GPIO_SetBits(GPIOE,GPIO_Pin_4); //熄滅LED燈 delay_ms(500);//延時500ms GPIO_ResetBits(GPIOE,GPIO_Pin_4);//點亮LED燈 delay_ms(500);//延時500ms }
?延時500ms時波形如下
 ?
?
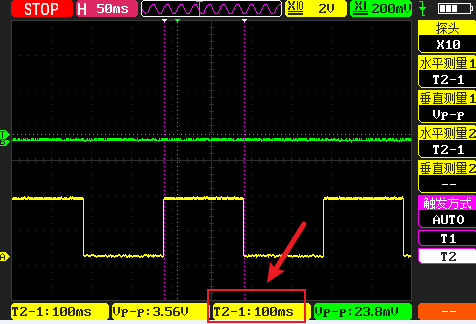
當修改代碼,延時100ms時?
while (1) { GPIO_SetBits(GPIOE,GPIO_Pin_4); //熄滅LED燈 delay_ms(100);//延時100ms GPIO_ResetBits(GPIOE,GPIO_Pin_4);//點亮LED燈 delay_ms(100);//延時100ms }
?波形如下
 ?
?
02、定時器測量
定時器不僅僅我們可以實作我們之前講解的《基礎定時功能》《PWM輸出功能》《輸入捕獲功能》《觸摸按鍵功能》,還可以用于測量一段代碼的運行時間,在學習使用定時器測量代碼運行時間之前,如果對定時器不了解的同學先看剛剛提到的定時器的文中,重點文章《STM32基礎定時器簡介》,本篇文章不再講解定時器的基礎功能,
定時器本質上就是向上累加的計數器(如果配置成向上計數時),所以我們在測量開始的代碼前面讀取定時器的計數器,在結束測量的位置再讀取定時器的計數器,獲得兩次的差值,這樣就可以計算出這段代碼的運行的時間,這就是簡單的原理,下面直接擼代碼,
首先配置定時器,這里我使用定時器3,配置定時器的計數器每增加1,表示100us,并且將溢位值設定為最大,
?
void TIM_Config(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; /* TIM3 clock enable */ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); TIM_TimeBaseStructure.TIM_Period = 0xFFFF-1; TIM_TimeBaseStructure.TIM_Prescaler = (uint16_t) ((SystemCoreClock / 2) / 10000) - 1; TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV2; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_Cmd(TIM3, ENABLE); }
測量代碼運行時間的代碼如下,這里進行了防溢位的處理
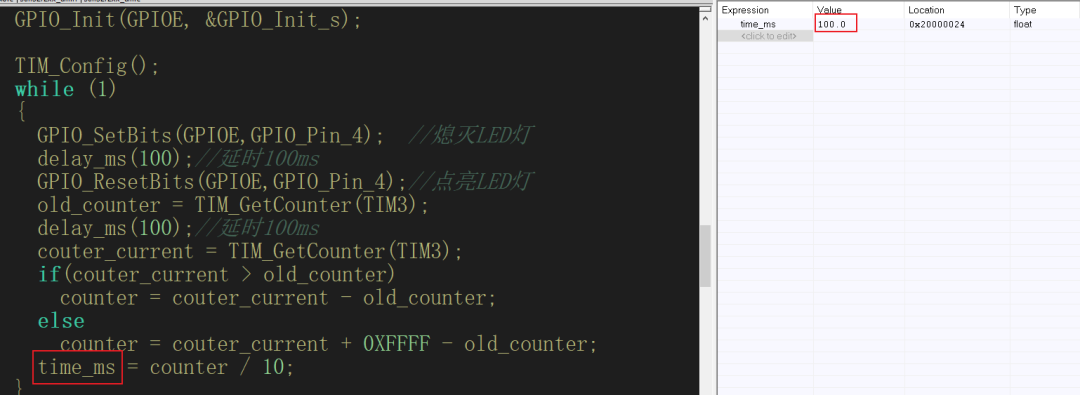
while (1) { GPIO_SetBits(GPIOE,GPIO_Pin_4); //熄滅LED燈 delay_ms(100);//延時100ms GPIO_ResetBits(GPIOE,GPIO_Pin_4);//點亮LED燈 old_counter = TIM_GetCounter(TIM3); delay_ms(100);//延時100ms couter_current = TIM_GetCounter(TIM3); if(couter_current > old_counter) counter = couter_current - old_counter; else counter = couter_current + 0XFFFF - old_counter; time_ms = counter / 10; }
?上述代碼延時100ms,通過定時器測量結果同樣為100ms,準確無誤,如下所示:
 ?
?
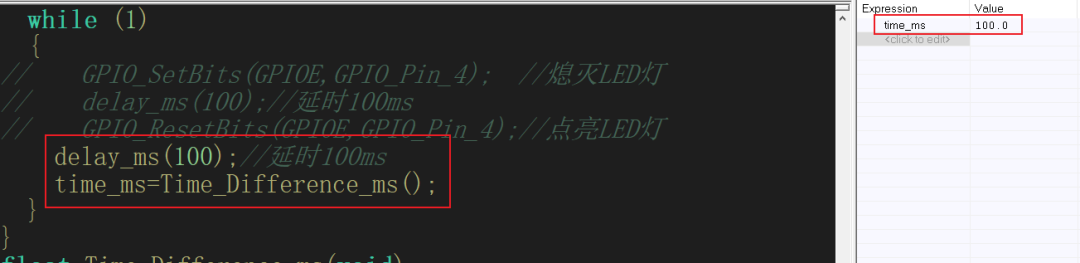
float Time_Difference_ms(void) { static uint32_t old_counter; uint32_t counter,couter_current; couter_current = TIM_GetCounter(TIM3); if(couter_current > old_counter) counter = couter_current - old_counter; else counter = couter_current + 0XFFFF - old_counter; old_counter = couter_current; return (counter / 10); }
?這樣就可以實作,測量兩次呼叫這個介面的是時間差,如下,可以準確測得兩次呼叫Time_Difference_ms這個函式的時間差是100ms,
 ?
?
float Time_Difference_ms(uint8_t flg) { static uint32_t old_counter[5]; uint32_t counter,couter_current; couter_current = TIM_GetCounter(TIM3); if(couter_current > old_counter[flg]) counter = couter_current - old_counter[flg]; else counter = couter_current + 0XFFFF - old_counter[flg]; old_counter[flg] = couter_current; return (counter / 10); }
這樣就可以得到多個位置兩次運行到相同位置的時間差,
當然,這樣也存在缺點:
1、需要占用一個定時器
2、按上述配置,最長測量時間為0XFFFF*0.1=6553.5ms=6.553.5s,
Keil和IAR的工程檔案下載地址:
PCB和工程代碼開源地址:
https://github.com/strongercjd/STM32F207VCT6
點擊查看本文所在的專輯,STM32F207教程
轉載請註明出處,本文鏈接:https://www.uj5u.com/caozuo/295875.html
標籤:嵌入式
下一篇:Arduino 指紋鎖踩坑記