目錄
- STC8H開發(一): 在Keil5中配置和使用FwLib_STC8封裝庫(圖文詳解)
- STC8H開發(二): 在Linux VSCode中配置和使用FwLib_STC8封裝庫(圖文詳解)
- STC8H開發(三): 基于FwLib_STC8的模數轉換ADC介紹和演示用例說明
- STC8H開發(四): FwLib_STC8 封裝庫的介紹和使用注意事項
- STC8H開發(五): SPI驅動nRF24L01無線模塊
- STC8H開發(六): SPI驅動ADXL345三軸加速度檢測模塊
ADXL345
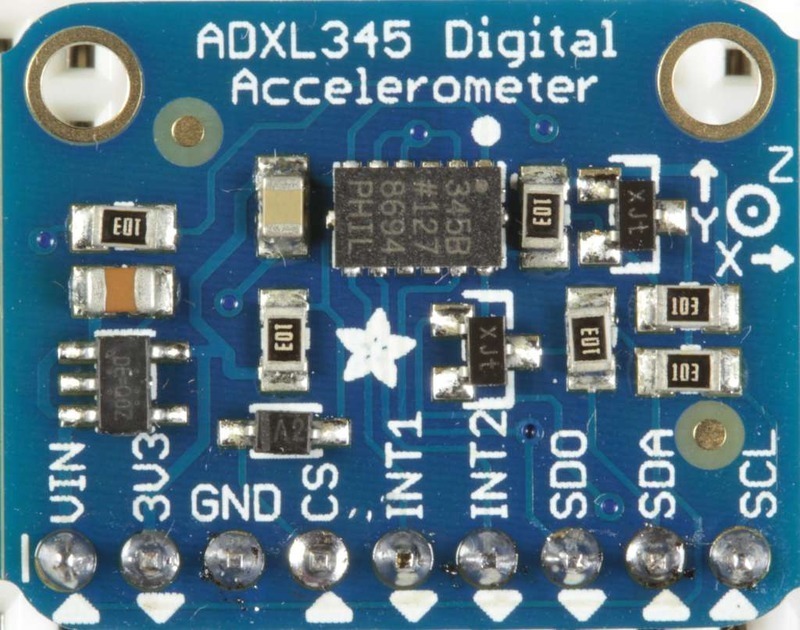
ADXL345是一款常見的的3軸加速度計, Analog Device生產. 13位解析度, ±16 g測量范圍, 解析度3.9 mg/LSB. 可通過SPI(3線或4線)或I2C介面訪問.
主要用于傾斜檢測, 靜態重力加速度測量, 以及運動或沖擊導致的動態加速度測量. 能夠測量不到1.0°的傾斜角度變化. 可以對單擊, 雙擊, 自由落體等情況設定中斷.
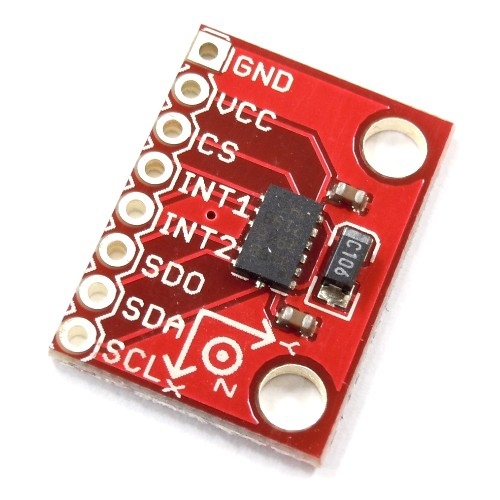
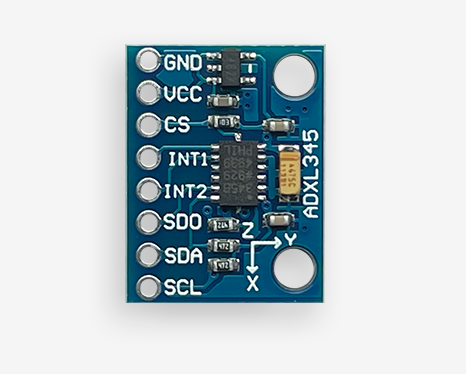
模塊與STC8H的接線
市面上的模塊, 一般是8個pin腳, 在使用SPI接線方式的情況下, 與STC8H的接線方式如下. 除了SPI用到的CS, MISO, MOSI, SCLK以外, STC8H還需要提供兩個中斷輸入, 因為INT0, INT1已經被SPI介面占用, 所以只能用INT2和INT3, 這兩個外部中斷只支持低電平觸發, 所以在ADXL345中需要設定中斷輸出為active low.
* GND -> GND G
* VDD(Vcc) -> VCC V
* CS -> GPIO OUT P35 34
* INT1 -> GPIO IN P36 INT2 35
* INT2 -> GPIO IN P37 INT3 36
* SDO -> MISO P33 30
* SDI/SDA -> MOSI P34 31
* SCL -> SCLK P32 29
模塊與STC8H的SPI通信
SPI的初始化和大多數SPI設備不同, 使用的初始化引數是
- 時鐘空閑時高電平
- 資料順序 MSB 先發送
- 時鐘相位上資料使用時鐘后沿讀取
void SPI_Init(void)
{
// ADXL345, SPI CLK max frequency is 5MHz
SPI_SetClockPrescaler(SPI_ClockPreScaler_16);
// Clock is high when idle
SPI_SetClockPolarity(HAL_State_ON);
// Data transfer is driven by lower SS pin
SPI_SetClockPhase(SPI_ClockPhase_TrailingEdge);
// MSB first
SPI_SetDataOrder(SPI_DataOrder_MSB);
// Define the output pins
SPI_SetPort(SPI_AlterPort_P35_P34_P33_P32);
// Ignore SS pin, use MSTR to swith between master/slave mode
SPI_IgnoreSlaveSelect(HAL_State_ON);
// Master mode
SPI_SetMasterMode(HAL_State_ON);
// Start SPI
SPI_SetEnabled(HAL_State_ON);
}
可以沿用之前多位元組發送的介面, 這里需要注意的是
- ADXL345對同一個暫存器地址的寫和讀, 通過地址的D7(最高位)來區分, 讀操作需要將D7置1
- ADXL345支持一次讀取多位元組, 即burst read, 通過地址的D6(次高位)來區分, 讀取多位元組時需要將D6置1
uint8_t ADXL345_ReadByte(uint8_t addr)
{
ADXL345_CS = 0;
xbuf[0] = addr | 0x80;
xbuf[1] = 0xFF;
SPI_TxRxBytes(xbuf, 2);
ADXL345_CS = 1;
return xbuf[1];
}
uint16_t ADXL345_ReadInt(uint8_t addr)
{
ADXL345_CS = 0;
xbuf[0] = addr | 0xC0;
xbuf[1] = 0xFF;
xbuf[2] = 0xFF;
SPI_TxRxBytes(xbuf, 3);
ADXL345_CS = 1;
return *((uint16_t *)&xbuf[1]);
}
void ADXL345_WriteByte(uint8_t addr, uint8_t dat)
{
ADXL345_CS = 0;
xbuf[0] = addr;
xbuf[1] = dat;
SPI_TxRxBytes(xbuf, 2);
ADXL345_CS = 1;
}
模塊的中斷及設定
中斷型別
模塊提供多種中斷, 包含
DATA READY 資料待讀取
當三軸資料采集完成時, 會產生這個中斷, 采集的速度是由暫存器0x2C—BW_RATE決定的, 默認為100Hz, 即每秒100次采集.
當中斷產生后, 必須通過讀取X, Y, Z軸的采樣資料才能清除中斷, 如果沒有讀取動作, 就不會再產生中斷
SINGLE TAP 單次敲擊
當采樣資料滿足預設的敲擊加速度和持續時長時, 會產生這個中斷, 產生中斷后, 必須通過讀取中斷源暫存器暫存器0x30—INT_SOURCE將中斷清除, 否則不會再產生中斷.
DOUBLE TAP 雙擊
同上, 當單次敲擊滿足預設的時間間隔和時間視窗時, 會產生這個中斷, 需要通過讀取中斷源暫存器將中斷清除
ACTIVITY 活動和 INACTIVITY 非活動
加速度值大于THRESH_ACT暫存器(地址0x24)存盤值時, Activity(活動)中斷置位. 加速度值小于THRESH_INACT暫存器(地址0x25)的存盤值時, Inactivity(靜止)位置位, TIME_INACT最大值為255秒.
需要通過讀取中斷源暫存器清除中斷
FREE FALL 自由落體
加速度值小于THRESH_FF暫存器(地址0x28)的存盤值時, FREE_FALL置位. 大于TIME_FF暫存器(地址0x29)所有軸(邏輯與)所規定的時間.
FREE_FALL中斷不同于靜止中斷, 因為所有軸始終參與, 并為邏輯“和”的形式,定時器周期小得多(最大值 1.28秒), 始終為直流耦合操作模式.
WATERMARK 水位
在FIFO模式和流模式下, FIFO中的采樣數與FIFO_CTL暫存器(地址0x38)采樣數位規定的數量相等時, 水位中斷置位. 此后FIFO繼續收集樣本直到填滿, 然后停止收集資料.
FIFO停止收集資料后, 該器件繼續作業, 因此, FIFO填滿
時, 敲擊檢測等功能可以使用
OVERRUN 溢位
當有新采樣點更新了未被讀取的前次采樣點時, Overrun中斷置位. Overrun功能與FIFO的作業模式有關:
- 當FIFO作業在Bypass模式下, 如果有新采樣點更新了DATAX、
DATAY和DATAZ暫存器(地址0x32至0x37)里的數值,則Overrun中斷置位 - 在其他模式下, 只有FIFO被存滿時, Overrun中斷才會置位.
- 讀取FIFO內容時,Overrun位自動清零
中斷設定
對應的暫存器有
- 暫存器0x2E—INT_ENABLE 這里設定各個中斷的開啟和關閉
- 暫存器0x2F—INT_MAP (R/W) 這里設定中斷輸出到INT1還是INT2, 對應的位為0輸出到INT1, 為1輸出到INT2
- 暫存器0x30—INT_SOURCE(只讀) 產生中斷時, 中斷對應的位會被置1, 讀取這里的值可以判斷中斷來源并清除中斷
敲擊檢測引數說明
ADXL345的敲擊檢測和雙擊檢測有5個引數可以設定, 如果設定得不正確, 可能會完全不產生中斷
暫存器0x2A—TAP_AXES
用于設定參與檢測的軸, 測驗階段可以將三個軸都打開
暫存器0x1D THRESH_TAP
用于設定敲擊判斷的加速度閾值, 運動時檢測到的加速度會與THRESH_TAP的值進行比較, 超過即滿足. 需要設定合適的值以便實作正常敲擊檢測.
從0到255, 間隔為 62.5 mg/LSB(即0xFF = 16 g), 開啟敲擊檢測后這個值不能為0, 否則芯片會不能正常作業.
實際測驗中, 值不能太小, 否則一直在觸發, 值也不能太大, 否則無論怎么敲擊也檢測不到中斷, 經驗值為0x1F到0x35之間, Arduino庫使用的是0x28, 對應2.5g加速度.
暫存器0x21 DUR
時間長度值, 運動中, 滿足THRESH_TAP加速度強度的采集, 其持續時間與 DUR 的值進行比較, 超過即滿足. 需要設定合適的值才能正確檢測敲擊.
從0到255, 間隔為 625 μs/LSB, 值為0時,禁用單擊/雙擊檢測功能.
實際測驗中, 值不能太大否則完全檢測不到, Arduino庫使用的是0x20, 0.02秒, 可以在這個附近調整.
暫存器0x22—Latent
時間長度, 表示在檢測到敲擊后, 與第二次敲擊之間需要滿足的間隔長度, 在此間隔時間后開啟檢測視窗, 能檢測出可能的第二次敲擊事件.
英文手冊的原文 The latent register is eight bits and contains an unsigned time value representing the wait time from the detection of a tap
event to the start of the time window (defined by the window register) during which a possible second tap event can be detected.
從0到255, 間隔為 1.25 ms/LSB, 值為0時,禁用雙擊檢測功能
可以根據自己的場景調整, Arduino庫使用的是0x50, 對應0.1秒.
暫存器0x23—Window
時間長度, 表示在延遲時間(由Latent暫存器確定)期滿后的時間視窗長度,在視窗中開始進行第二次有效敲擊,
從0到255, 間隔為 1.25 ms/LSB, 值為0時,禁用雙擊檢測功能
英文手冊原文 The window register is eight bits and contains an unsigned time value representing the amount of time after the expiration of the
latency time (determined by the latent register) during which a second valid tap can begin.
可以根據自己的場景調整, Arduino庫使用的是0xF0, 對應0.3秒.
中斷使用的注意事項
- 在中斷處理中, 要清除中斷位
- 在初始化后, 一定要清中斷, 否則不會產生第一次中斷處理, 就一直卡在哪里
下面這段代碼就是在進入main回圈前的中斷清理
// read to clear interrupts, or the counter will never receive interrupts
x = ADXL345_ReadInt(ADXL345_REG_DATAX0);
y = ADXL345_ReadInt(ADXL345_REG_DATAY0);
z = ADXL345_ReadInt(ADXL345_REG_DATAZ0);
x = ADXL345_ReadByte(ADXL345_REG_INT_SOURCE);
檢測資料
ADXL345在檢測程序中, 根據采樣速率不斷輸出三軸上采樣的加速度值, 因為重力加速度的存在, 在調整模塊傾斜度時能觀察到讀數的變化, 對應PCB上標識的三軸方向, 當軸朝向地面時, 讀數會達到最大負值, 在背向地面時, 能讀到最大正值. 根據三軸采樣到的資料, 可以判斷(如果當前是靜止狀態)器件姿態(傾斜度).
這個采樣只能得到俯仰角和橫滾角資料, 不能得到航向角資料, 如果需要航向角, 還需要有電子羅盤傳感器配合.
完整代碼
- GitHub FwLib_STC8/tree/master/demo/spi/adxl345
- Gitee FwLib_STC8/tree/master/demo/spi/adxl345
轉載請註明出處,本文鏈接:https://www.uj5u.com/caozuo/415196.html
標籤:其他
上一篇:常用命令記錄