目錄
- STC8H開發(一): 在Keil5中配置和使用FwLib_STC8封裝庫(圖文詳解)
- STC8H開發(二): 在Linux VSCode中配置和使用FwLib_STC8封裝庫(圖文詳解)
- STC8H開發(三): 基于FwLib_STC8的模數轉換ADC介紹和演示用例說明
- STC8H開發(四): FwLib_STC8 封裝庫的介紹和使用注意事項
- STC8H開發(五): SPI驅動nRF24L01無線模塊
- STC8H開發(六): SPI驅動ADXL345三軸加速度檢測模塊
- STC8H開發(七): I2C驅動MPU6050三軸加速度+三軸角速度檢測模塊
- STC8H開發(八): NRF24L01無線傳輸音頻(對講機原型)
- STC8H開發(九): STC8H8K64U模擬USB HID外設
- STC8H開發(十): SPI驅動Nokia5110 LCD(PCD8544)
- STC8H開發(十一): GPIO單線驅動多個DS18B20數字溫度計
DS18B20
引數
- 單線總線結構, 允許一根總線上掛接多個 DS18B20 并分別通信
- 在普通溫度下, 可以直接從資料口取電, 這時候只需要兩根連線.
- 供電電壓 [3.0V, 5.5V]
- 溫度檢測范圍 [-55°C, +125°C]攝氏度, [-67°F, +257°F]華氏度
- 精確率: 在 [-10°C, +85°C] 為 ±0.5°C
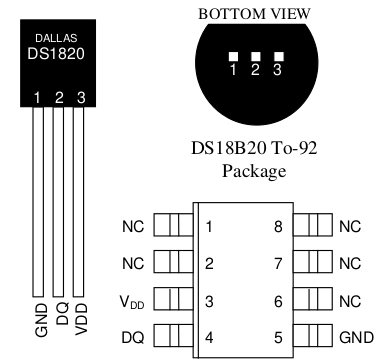
Pin腳
一般見到的都是3pin的To-92封裝, 和普通三極管一樣, 使平面朝向自己, Pin腳朝下, 從左往右依次為: GND, DQ, VDD
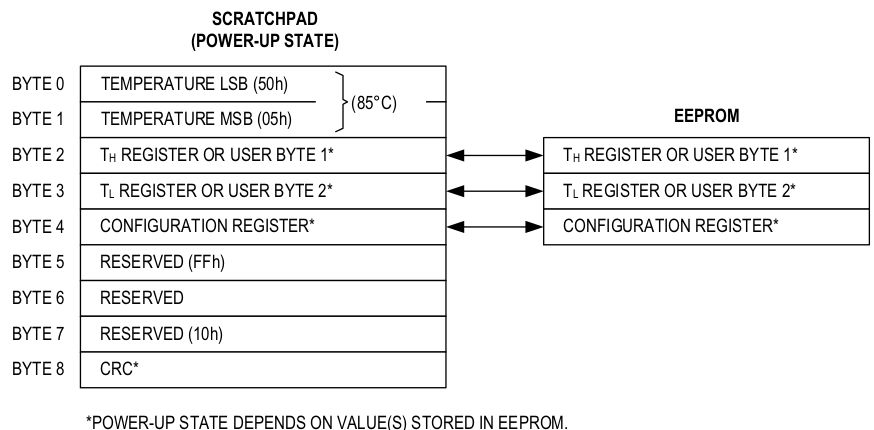
內部存盤結構
DS18B20內部有9位元組的暫存器和3個位元組的EEPROM存盤, EEPROM可以擦寫5萬次以上. 結構如下
測溫
DS18B20的核心功能就是數字化的溫度讀數, 可以設定為9, 10, 11, 12位解析度, 預設解析度是12位. 各解析度對應的讀數, 溫度解析度分別是0.5, 0.25, 0.125, 0.0625攝氏度.
在執行溫度轉換命令Convert T0x44后, 溫度會被轉換并存盤在一個2位元組的記憶體單元, 然后通過讀取命令Read Scratchpad0xBE讀出.
轉換時間
在溫度轉換命令Convert T0x44發起到采集完成需要的時間可能會長達750 ms. 實際使用中, 不同批次 DS18B20 的轉換時間差異也很大, 有的在200-300 ms, 有的接近 800 ms. 貌似越是最近制造的時間越短(可能是工藝改進了?).
如果沒有從VDD供電, DS18B20 的 DQ 必須在轉換程序中保持高電平以提供能量, 因此在這種場景下, 采集的程序中不允許進行其他活動.
讀數結構
這兩個位元組各個bit分別代表的數字含義如下, 高位元組的高5位僅用于表示溫度的正負, 正溫度是0, 負溫度是1, 后面11個bit表示的數字, 負值使用的是補碼, 讀數用 (0xFF - 讀數)
- 正溫度時, 將16位整數乘以對應的溫度解析度
- 負溫度時, 將16位整數取反加1后, 乘以對應的溫度解析度
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S | S | S | S | S | \(2^6\) | \(2^5\) | \(2^4\) | \(2^3\) | \(2^2\) | \(2^1\) | \(2^0\) | \(2^-1\) | \(2^-2\) | \(2^-3\) | \(2^-4\) | |
| MSB | LSB | MSB | LSB |
讀數快查表
上電后的預設值為0x0550, 對應85°C, 如果一直讀出都是這個值, 需要檢查接線
| TEMPERATURE | DIGITAL OUTPUT (Binary) | DIGITAL OUTPUT (Hex) |
|---|---|---|
| +125°C | 0000 0111 1101 0000 | 07D0h |
| +85°C | 0000 0101 0101 0000 | 0550h* |
| +25.0625°C | 0000 0001 1001 0001 | 0191h |
| +10.125°C | 0000 0000 1010 0010 | 00A2h |
| +0.5°C | 0000 0000 0000 1000 | 0008h |
| 0°C | 0000 0000 0000 0000 | 0000h |
| -0.5°C | 1111 1111 1111 1000 | FFF8h |
| -10.125°C | 1111 1111 0101 1110 | FF5Eh |
| -25.0625°C | 1111 1110 0110 1111 | FF6Fh |
| -55°C | 1111 1100 1001 0000 | FC90h |
ROM讀數
每個 DS18B20 包含一個唯一的只讀的64bit編碼, 其結構為
- 最初 8 bits 為固定的 0x28, 1-Wire family code
- 接下來的 48 bits 是唯一序列號
- 最后的 8 bits 是前面 56 bits 的 CRC 校驗碼.
這個 64-bit ROM 和 ROM 方法允許在單線(1-Wire)總線上運行多個 DS18B20, 使用單線總線需要使用下面的方法之一發起:
- Read ROM,
- Match ROM,
- Search ROM,
- Skip ROM, or
- Alarm Search.
After a ROM function sequence has been successfully executed, the functions specific to the DS18B20 are accessible and the
bus master may then provide one of the six memory and control function commands.
CRC 計算
DS18B20 在讀取8位元組ROM和9位元組暫存器時, 最后一個位元組都是前面所有位元組的CRC校驗值. CRC值的比較與是否繼續操作完全由總線控制端決定, DS18B20 內部僅計算CRC, 并不會對CRC不匹配的情況進行處理, 需要總線控制端主動判斷.
計算CRC的等效多項式函式為(這是datasheet中的式子, 并非冪運算, 要結合后面的流程圖理解)
\(CRC = X^8 + X^5 + X^4 + 1\)
1-Wire總線的CRC計算由移位暫存器和異或門組成的多項式發生器來執行: 移位暫存器位初始化為0, 然后從第一個位元組的最低位開始, 一次移入一位, 根據計算結果決定是否與第4, 第5位作異或, 然后CRC也往右移, 最后移位暫存器的值就是CRC.

使用C語言表示的8位CRC計算函式為
uint8_t DS18B20_Crc(uint8_t *addr, uint8_t len)
{
uint8_t crc = 0, inbyte, i, mix;
while (len--)
{
// inbyte 存盤當前參與計算的新位元組
inbyte = *addr++;
for (i = 8; i; i--)
{
// 將新位元組與CRC從低位到高位, 依次做異或運算, 每次運算完CRC右移一位
// 如果運算結果值為1, 則將CRC與 1000 1100 作異或
// 第3,4位代表流程圖中的異或運算, 第7位其實就是運算結果移入的1
mix = (crc ^ inbyte) & 0x01;
crc >>= 1;
if (mix)
{
crc ^= 0x8C;
}
inbyte >>= 1;
}
}
return crc;
}
ROM Search 搜索演算法
當單線總線上掛接了多個DS18B20時, 總線控制端需要通過 ROM Search 命令來判斷總線上存在的設備以及獲取他們的8位元組唯一ROM.
ROM搜索演算法是重復進行一個簡單的三步操作: 讀取一位, 讀取這位的補碼, 寫入這一位的目標值.
總線控制端在8位元組ROM的每一位上執行這個三步操作后, 就能知道一個 DS18B20 的 8位元組 ROM 值, 如果總線上有多個 DS18B20, 則需要重復多次.
搜索示例
下面的例子假設總線上有4個設備, 對應的ROM值分別為
- ROM1 00110101...
- ROM2 10101010...
- ROM3 11110101...
- ROM4 00010001...
搜索程序如下
- 單線總線控制端(以下簡稱總控)執行 RESET, 所有的 DS18B20設備(以下簡稱設備)回應這個RESET
- 總控執行 Search ROM 命令
- 總控讀取1個bit. 這時每個設備都會將自己的ROM的第一個bit放到總線上, ROM1 和 ROM4 會對總線寫0(拉低總線), 而 ROM2 和 ROM3 則會對總線寫1, 允許總線保持高電平. 這時候總控讀取的是0(低電平). 然后總控繼續讀下一個bit, 每個設備會將第一個bit的補碼放到總線上, 這時候 ROM1 和 ROM4 寫1, 而 ROM2 和 ROM3 寫0, 因此總控依然讀到一個0, 這時候總控會知道存在多個設備, 并且它們的ROM在這一位上的值不同. 從每次的兩步讀取中觀察到的值分別有以下的含義
- 00 一定有多個設備, 且在這一位上值不同
- 01 所有設備(不一定有多個), ROM在這一位上的值是0
- 10 所有設備(不一定有多個), ROM在這一位上的值是1
- 11 總線上沒有設備
- 總控寫入一個bit, 比如寫入0, 表示在后面的搜索中屏蔽 ROM2 和 ROM3, 僅留下 ROM1 和 ROM4
- 總控再執行兩次讀操作, 讀到的值為0,1, 這表示總線上所有設備在這一位上的值都是0
- 總控寫入一個bit, 因為值是確定的, 這次寫入的是0
- 總控再執行兩次讀操作, 讀到的值為0,0, 這表示總線上還有多個設備, 在這一位上的值不同
- 總控寫入一個bit, 這次寫入0, 這將屏蔽 ROM1, 僅留下 ROM4
- 總控重復進行三步操作, 讀出 ROM4 剩余的位, 完成第一次搜索
- 總控再次重復之前的搜索直到第7位
- 總控寫入一個bit, 這次寫入1, 將屏蔽 ROM4, 僅保留 ROM1
- 總控通過重復三步操作, 讀出 ROM1 剩余的位
- 總控再次重復之前的搜索直到第3位
- 總控寫入一個bit, 這次寫入1, 將屏蔽 ROM1 和 ROM4 僅保留 ROM2 和 ROM3
- 重復之前的邏輯, 當所有00讀數都被處理, 說明設備的ROM已經全部被讀取.
總控通過單線總線讀取所有設備, 每個設備需要的時間為960 μs + (8 + 3 x 64) 61 μs = 13.16 ms, 識別速度為每秒鐘75個設備.
代碼邏輯
整體的邏輯是按一個固定的方向(先0后1)深度優先遍歷一個二叉樹.
資料結構
- 預設一個8位元組陣列 Buff 用于記錄路徑(即ROM的讀數)
- 預設一個8位元組陣列 Stack, 用于記錄每一位的值是否確定, 如果確定就是1, 未確定就是0.
- 預設一個整數變數 Fork_Point 用于記錄每一輪搜索中得到的最深分叉點的位置, 下一次到這一位就用1進行分叉.
每一輪的遍歷邏輯
- 從低位開始, 每一位進行兩次讀, 得到這一位的值和補碼
- 對前面的結果進行判斷
- 如果為11, 說明沒有設備, 直接退出
- 如果為01, 說明這一位都是0, 寫入 Buff, 同時將 Stack 這一位設成 1 (已確認)
- 如果為10, 說明這一位都是1, 寫入 Buff, 同時將 Stack 這一位設成 1 (已確認)
- 如果為00, 說明這一位產生了分叉, 需要繼續判斷
- 對分叉的判斷
- 如果當前位置比已知的分叉點更淺, 說明還沒到該分叉的位置, 繼續設定成 Buff 中上一次使用的值, Stack不變
- 如果當前位置等于分叉點, 說明已經到了上次定好的分叉位置, 上次用0, 這次就用1進行分叉, 這次分叉完, 這一位就確認了, 將 Stack 這一位設成 1 (已確認)
- 如果當前位置比已知的分叉點位置還要深, 說明發現了新的分叉點(例如用1分叉后, 進入了新的子樹), 更新分叉點位置, 將 Stack 這一位設成 0 (未確認), 用默認的0繼續往下走
- 在這輪遍歷結束后, Buff 就得到了一個新的地址
- 在 Stack 上找到分叉點的位置, 將分叉點設定到最淺的一個0(未確定)的位置. 例如這次正好在分叉點使用1分叉, 當前點確認了, 而之后又全是確認的情況, 需要將分叉點往上移.
結束條件: 和深度遍歷一樣, 每一輪遍歷后分叉點可能會上下變化, 當分叉點的位置為0時, 說明遍歷結束
C語言代碼實作
uint8_t DS18B20_Buff[9];
uint8_t Search_Stack[8], Fork_Point;
uint8_t DS18B20_Detect(void)
{
uint8_t len = 64, pos = 0;
/* Reset line */
DS18B20_Reset();
/* Start searching */
DS18B20_WriteByte(ONEWIRE_CMD_SEARCHROM);
while (len--)
{
// Two reads
__BIT pb = DS18B20_ReadBit();
__BIT cb = DS18B20_ReadBit();
if (pb && cb)
{
// no device
return 0;
}
else if (pb)
{
// bit = 1
DS18B20_Buff[pos / 8] |= 0x01 << (pos % 8);
DS18B20_WriteBit(SET);
// confirm: set this bit to 1
Search_Stack[pos / 8] |= 0x01 << (pos % 8);
}
else if (cb)
{
// bit = 0
DS18B20_Buff[pos / 8] &= ~(0x01 << (pos % 8));
DS18B20_WriteBit(RESET);
// confirm: set this bit to 1
Search_Stack[pos / 8] |= 0x01 << (pos % 8);
}
else
{
// bit can be 0 or 1
if (Fork_Point == 0xFF || pos > Fork_Point)
{
// new fork point, try 0
DS18B20_Buff[pos / 8] &= ~(0x01 << (pos % 8));
DS18B20_WriteBit(RESET);
// unconfirm: set this bit to 0
Search_Stack[pos / 8] &= ~(0x01 << (pos % 8));
// record new fork point
Fork_Point = pos;
}
else if (pos == Fork_Point)
{
// reach fork point, try 1
DS18B20_Buff[pos / 8] |= 0x01 << (pos % 8);
DS18B20_WriteBit(SET);
// confirm: set this bit to 1
Search_Stack[pos / 8] |= 0x01 << (pos % 8);
}
else // middle point, remain old value
{
DS18B20_WriteBit(DS18B20_Buff[pos / 8] >> (pos % 8) & 0x01);
}
}
pos++;
}
// Reset fork point
while (Fork_Point > 0 && Search_Stack[Fork_Point / 8] >> (Fork_Point % 8) & 0x01 == 0x01) Fork_Point--;
return pos;
}
呼叫方法
Fork_Point = 0xFF;
while (Fork_Point && DS18B20_Detect())
{
UART1_TxHex(Fork_Point);
UART1_TxChar(' ');
PrintBuff(0, 8);
UART1_TxString("\r\n");
}
使用STC8H驅動DS18B20
接線
GND -> GND
P35 -> DQ
3.3V -> VDD
代碼
代碼可以從GitHub或者Gitee下載
- GitHub: FwLib_STC8/tree/master/demo/gpio/ds18b20
- Gitee: FwLib_STC8/tree/master/demo/gpio/ds18b20
定義 IO
只需要一個Pin, 在STC8H中, 注意要將其設定為上拉, 否則讀出來的全是0
#define DS18B20_DQ P35
#define DS18B20_DQ_PULLUP() GPIO_SetPullUp(GPIO_Port_3, GPIO_Pin_5, HAL_State_ON)
#define DS18B20_DQ_INPUT() GPIO_P3_SetMode(GPIO_Pin_5, GPIO_Mode_Input_HIP)
#define DS18B20_DQ_OUTPUT() GPIO_P3_SetMode(GPIO_Pin_5, GPIO_Mode_InOut_OD)
#define DS18B20_DQ_LOW() DS18B20_DQ=RESET
#define DS18B20_DQ_HIGH() DS18B20_DQ=SET
IO 讀寫
讀一個bit和一個byte
__BIT DS18B20_ReadBit(void)
{
__BIT b = RESET;
/* Line low */
DS18B20_DQ = RESET;
DS18B20_DQ_OUTPUT();
SYS_DelayUs(2);
/* Release line */
DS18B20_DQ_INPUT();
SYS_DelayUs(10);
/* Read line value */
if (DS18B20_DQ) {
/* Bit is HIGH */
b = SET;
}
/* Wait 50us to complete 60us period */
SYS_DelayUs(50);
/* Return bit value */
return b;
}
uint8_t DS18B20_ReadByte(void)
{
uint8_t i = 8, byte = 0;
while (i--)
{
byte >>= 1;
byte |= (DS18B20_ReadBit() << 7);
}
return byte;
}
寫一個bit和一個byte
void DS18B20_WriteBit(__BIT b)
{
if (b)
{
/* Set line low */
DS18B20_DQ = RESET;
DS18B20_DQ_OUTPUT();
SYS_DelayUs(10);
/* Bit high */
DS18B20_DQ_INPUT();
/* Wait for 55 us and release the line */
SYS_DelayUs(55);
DS18B20_DQ_INPUT();
}
else
{
/* Set line low */
DS18B20_DQ = RESET;
DS18B20_DQ_OUTPUT();
SYS_DelayUs(65);
/* Bit high */
DS18B20_DQ_INPUT();
/* Wait for 5 us and release the line */
SYS_DelayUs(5);
DS18B20_DQ_INPUT();
}
}
void DS18B20_WriteByte(uint8_t byte)
{
uint8_t i = 8;
/* Write 8 bits */
while (i--)
{
/* LSB bit is first */
DS18B20_WriteBit(byte & 0x01);
byte >>= 1;
}
}
單個 DS18B20 的場景
初始化, 注意設定上拉, 以及輸入和輸出模式的切換
void DS18B20_Init(void)
{
DS18B20_DQ_PULLUP();
DS18B20_DQ_OUTPUT();
DS18B20_DQ = SET;
SYS_DelayUs(1000);
DS18B20_DQ = RESET;
SYS_DelayUs(1000);
DS18B20_DQ = SET;
SYS_DelayUs(2000);
}
讀取溫度, 這樣讀出的值并非溫度值, 需要根據上面的溫度轉換, 乘以對應的溫度單元值(默認為0.0625攝氏度)
// 發起轉換
DS18B20_StartAll();
// 讀取總線, 當轉換完成時會變為高電平
while (!DS18B20_AllDone())
{
UART1_TxChar('.');
SYS_Delay(1);
}
// 重置總線
DS18B20_Reset();
// 跳過ROM選擇
DS18B20_WriteByte(ONEWIRE_CMD_SKIPROM);
// 寫入讀取暫存器指令
DS18B20_WriteByte(ONEWIRE_CMD_RSCRATCHPAD);
// 讀出9個位元組的資料
for (i = 0; i < 9; i++)
{
/* Read byte by byte */
data[i] = DS18B20_ReadByte();
}
// 溫度值位于第1和第2個位元組
temperature = data[1];
temperature = temperature << 8 | data[0];
讀取ROM
// 重置總線
DS18B20_Reset();
// 寫入讀取ROM指令, 注意這個命令不能用于連接多個設備的總線, 否則結果讀數是無意義的
DS18B20_WriteByte(ONEWIRE_CMD_READROM);
// 讀出資料
for (i = 0; i < 8; i++)
{
*buf++ = DS18B20_ReadByte();
}
多個 DS18B20 的場景
指定設備地址, 讀取溫度
// 重置總線
DS18B20_Reset();
// 根據地址選擇設備
DS18B20_Select(addr);
// 對選中的設備, 發起轉換
DS18B20_WriteByte(DS18B20_CMD_CONVERTTEMP);
// 等待轉換結束
// 重置總線
DS18B20_Reset();
// 根據地址選擇設備
DS18B20_Select(addr);
// 寫入讀取暫存器指令
DS18B20_WriteByte(ONEWIRE_CMD_RSCRATCHPAD);
// 讀取資料
for (i = 0; i < 9; i++)
{
*buf++ = DS18B20_ReadByte();
}
參考
- 單線總線搜索演算法 1-WIRE SEARCH ALGORITHM https://www.maximintegrated.com/en/design/technical-documents/app-notes/1/187.html
轉載請註明出處,本文鏈接:https://www.uj5u.com/caozuo/485581.html
標籤:其他
上一篇:linux命令__top