各位slam大神們,我想問下orb_salm2里關于一個ROS版本的viewerAR.cc里的一個代碼段。想半天沒想出來這個變數是什么。
Plane::Plane(const std::vector<MapPoint *> &vMPs, const cv::Mat &Tcw):mvMPs(vMPs),mTcw(Tcw.clone())
{
rang = -3.14f/2+((float)rand()/RAND_MAX)*3.14f;
Recompute();
}
里面的rang在viewAR.h注釋為arbitrary orientation along normal。也就是說沿法向量任意的方向。但我meow搞懂這注釋啥意思,望看過orb_slam2中的AR代碼的大佬能解答下,我在此謝謝啦
uj5u.com熱心網友回復:
垂直于法向量的任意方向: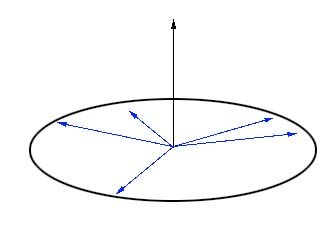
我猜。
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/12622.html
標籤:C++ 語言
上一篇:VS怎樣用檔案夾管理工程