CANopen是基于CAN協議的高級通信協議和設備組態檔規范,該協議是為嵌入式網路應用(如車載網路)開發的,CANopen涵蓋了網路編程框架,設備描述,介面定義和應用程式組態檔,CANopen使來自不同制造商的設備和應用程式之間實作通信標準化,它已被廣泛用于各個行業,并在自動化和運動應用中具有突出的表現,
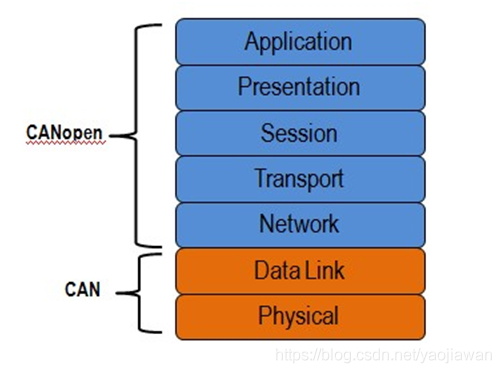
就OSI通信系統模型而言,CAN覆寫前兩個級別:物理層和資料鏈路層,物理層定義了所使用的線路,電壓,高速特性等,標準的CAN協議實作資料鏈路層,它是基于幀的(訊息)協議,CANopen涵蓋了上面五層:網路(尋址,路由),傳輸(端到端可靠性),會話(同步),表示(以標準方式編碼的資料,資料表示)和應用,應用層描述了如何配置,傳輸和同步CANopen設備,
許多處理器都實作了CAN 總線介面和驅動程式,我們假設讀者已經了解CANBUS 總線的基本知識,重點介紹應用程CANopen 協議,
CANopen 的基本概念
每個新技術的出現,都會伴隨著一大堆的技術術語和英文縮寫,使初學者難以理解,一位日本人稱為是“術語的洪流“,使用簡單的語言將一個復雜的事情的基本框架講明白,要比開頭就劈頭蓋腦地拋術語,講細節好的多,我寫這篇博文也就是這種嘗試,
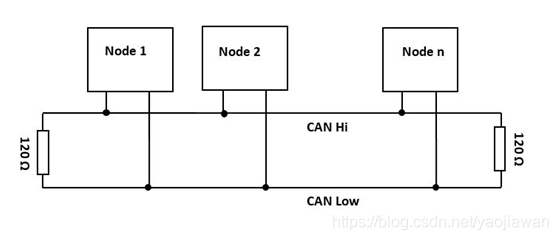
- CANBUS 是一種總線型通信網路,所有的節點都并聯在兩根通信線上,
- CANBUS 和以太網類似,是基于幀傳輸方式,只是以太網一個幀可以是1500個位元組,而CANBUS 的幀最多只能傳輸8個位元組

以太網的幀結構
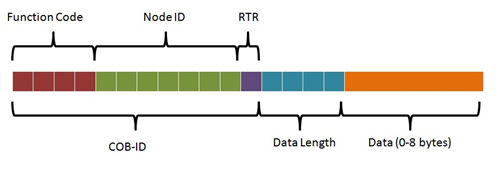
CANopen 的幀結構
不要以為資料幀短不好,短有短的優點,它將更可靠,實時性好,
- 11 位 進一步分成位 4個功能碼和7位 ID,7位大小限制CANopen網路上的設備數量限制為127個節點,
- 在一個控制系統中,設備的ID 和 資料的格式都是由系統廠商規定的,例如筆者曾經開發過一個汽車上的方向盤角度傳感器,就是由汽車廠提供的幀資料格式和ID 資料表,來設計的,與博世的同類產品不相同,
我們一直在講,底層通信協議只是解決語法的問題,沒有解決語法的問題-資料代表上面含義?
CANOpen 是建立在CANBUS鏈路層基礎上的應用協議,解決語意的問題(8個位元組什么代表意思?),讓不同廠商的產品能夠真正的互聯互通,
基于物件的通信
每個設備都有各種資料要和外界交換,例如方向傳感器的角度,速度和加速度,這些引數具有名稱,型別,長度等特征,訪問這些引數的方式最簡單的方式就是定義地址和長度,然后讀取,PLC 中modbus 協議就是這么簡單粗暴的方法,這種低級的方式顯然比較容易出錯,設定復雜,
控制協議越來越多地采納了面向物件程式設計的思想,將每個引數定義成為一個資料物件,并且可以采樣人類可讀方式撰寫,例如采樣XML 語言來描述,
CANopen 采用了類似的思想,它將引數定義為物件,每個設備中都有一個物件字典,物件字典可以一個檔案描述,它叫做EDS(Electronic data sheet),它采用了INI 檔案格式,
為了簡化協議中的資料交換,CANopen 協議中只是自定物件的索引(index)和子索引(sub index)并不傳遞物件的所有資訊,這就好比只交換字典中的的頁碼和行,列,通信雙方各自去查字典,了解具體的含義,
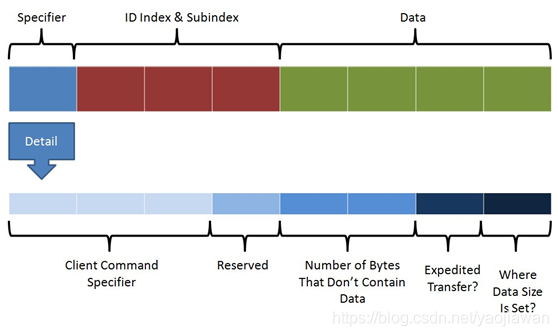
于是,CANBUS 可憐的8個位元組又分成了三個部分,一個位元組用于說明符,三個位元組用于節點索引和子索引,四個位元組用于傳輸中的實際資料,真正的資料只有4個位元組了,
當所有需要傳輸的資料都不能放入一條訊息中時,將選擇分段傳輸,因此必須使用多個訊息或“段”來傳輸資料,說明符的第7 為1 表示有后續資料,
物件字典
CANopen的中心主題之一是物件字典(OD),它實質上是一個存盤配置和程序資料的表格,所有CANopen設備都必須實作物件字典,
CANopen標準定義了16位的位索引和8位的子索引,也就是說,允許每個索引最多包含65536個索引和256個子條目,
該標準定義某些索引和索引范圍必須包含特定引數,例如,標準定義索引1008h(子索引00h)必須包含設備名稱,這樣,任何CANopen主站都可以從CANopen從站網路讀取此索引,
有些物件字典索引(例如設備型別(1000h))是強制性的,而另一些則是可選的,例如制造商軟體版本(100Ah),強制性索引的集合表示最小物件字典,這是標記符合CANopen的設備所必需的,
訪問物件字典的兩種通信機制是服務資料物件(SDO)和程序資料物件(PDO),
物件字典中包含的基本資料型別為:布林值,void(占位符),無符號整數,有符號整數,浮點數和字符,可以從基本資料型別構造更復雜的資料型別,例如字串,日期和時間,
EDS 檔案
前面提過,每個CANopen 兼容的設備,都需要提供一個EDS 檔案,以便讓其它訪問該節點的設備形成物件字典,主站程式需要匯入EDS檔案,EDS 是采用了INI 檔案格式,它最早是windows 組態檔的格式,也有廠家開發了EDS 的編輯工具,
服務資料物件(SDO)
在CANopen協議的網路上,每個節點必須實作一個服務器,該服務器處理對其物件字典的讀/寫請求,CANopen主站充當該服務器的客戶端,直接訪問(讀/寫)服務器物件字典的機制是服務資料物件(SDO),訪問了物件字典的節點稱為SDO服務器,獲取資料的節點稱為SDO客戶端,傳輸始終由SDO客戶端啟動,
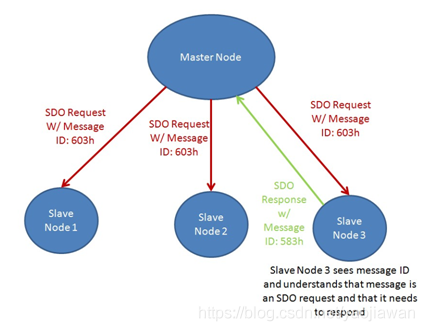
通常,主CANopen節點將向網路發送請求,感興趣的節點將以請求的資料進行回應,當SDO客戶端要從服務器請求資訊時,它將使用600h +節點ID的CAN-ID發送SDO請求, 然后,服務器將使用580h的CAN-ID +節點ID進行回應,節點ID指定訊息來自哪個從節點,下面所示的示例,主節點(SDO客戶端)將訊息發送到網路的CAN-ID為603h,盡管所有節點都可以看到此訊息,但目標節點以外的所有節點都將忽略該訊息,目標節點知道ID為603h的訊息意味著該訊息是針對該節點的,這是SDO請求,訊息的資料欄位將指定主節點要訪問資料的物件的索引和子索引,然后,目標節點以訊息ID 583h進行回應,
程序資料物件(PDO)
程序資料表示可以隨時間變化的資料,例如節點控制器的輸入(即傳感器)和輸出(即電動機驅動器),程序資料也存盤在物件字典中,但是,由于SDO通信一次僅允許訪問一個物件字典索引,因此訪問不斷變化的資料可能會有很多開銷,此外,CANopen協議要求節點必須能夠發送自己的資料,而無需由CANopen主站輪詢,因此,使用一種稱為“程序資料物件”(PDO)的通信方法來傳輸程序資料的方法也有所不同,
PDO有兩種型別:傳輸PDO(TPDO)和接收PDO(RPDO),TPDO是來自節點(產生的)的資料,而RPDO是到達節點(消耗的)的資料,另外,PDO有兩種型別的引數:配置引數和映射引數,物件詞典中保留給PDO配置和映射資訊的部分是索引1400h-1BFFh,
配置引數指定COB-ID,傳輸型別,禁止時間(僅TPDO)和事件計時器,這將在本節中進行說明,有多種方法可以啟動PDO傳輸,這些方法包括事件驅動,時間驅動,單獨輪詢和同步輪詢,傳輸型別在PDO的配置引數中指定,在事件驅動的傳輸中,當其中的程序資料發生更改時,將啟動PDO傳輸,在時間驅動的傳輸中,PDO傳輸以固定的時間間隔發生,在單獨的輪詢中,PDO傳輸是使用不常用的稱為遠程請求的機制啟動的,在同步輪詢中,使用SYNC信號啟動PDO傳輸,同步信號經常用作全域計時器,例如,如果CANopen主站發出SYNC訊息,則可以配置多個節點以查看并回應該SYNC,通過這種方式,主站可以同時獲取多個程序物件的“快照”,
網路管理(NMT)概述
網路管理服務包括在初始化,運行前,運行和停止之間更改從站狀態的能力,NMT協議允許CANopen網路控制各個節點的通信狀態,操作前狀態主要用于配置CANopen設備,因此,在預操作狀態下不允許進行PDO通信,在操作狀態下可以進行PDO通信,在停止狀態下,節點只能執行節點保護或心跳,而不能接識訓傳輸訊息,某些型別的CANopen通信允許處于不同狀態,例如,在操作前狀態下允許SDO,但不允許PDO,這是因為SDO通常用于初始化物件字典引數,
守護與心跳
CANopen規范要求節點必須使用某種方法來檢查節點是否“活動”,可用的兩種方法是:節點保護和心跳,后者是首選方法,
在心跳協議中,CANopen節點定期發送心跳訊息,該訊息使CANopen主設備或心跳使用者知道該節點仍處于活動狀態,如果心跳訊息在一定時間內未到達,則主機可以采取特定措施,此類操作可能是重置節點或向操作員報告錯誤,心跳訊息由CAN-ID 0x700 +節點ID標識,其中第一個資料位元組等于1110,
在節點保護協議中,CANopen主站輪詢從站節點的當前狀態資訊,如果節點在特定時間段內未回應,則主服務器將認為該節點已死,并將采取措施,
心跳協議是首選方法,因為它的開銷比節點保護少,
緊急訊息
CANopen網路中的??每個節點都分配有一條緊急訊息(EMCY),用于傳達節點狀態,請注意,心跳和節點保護協議旨在用于傳達通信故障,而緊急訊息則用于傳達節點內的錯誤(即傳感器故障),EMCY訊息由80h的COB-ID +節點ID標識,EMCY訊息的資料部分包含有關發生的錯誤的資訊,
下面我會來談談 CANopen 與IEC61499 相結合,
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/149160.html
標籤:python
上一篇:串口通信協議概述