Article Title: 3D printed, modularized rigid-flexible integrated soft finger actuators for anthropomorphic hands
This paper mainly present a pneumatical, multi-material 3D-printed, modularized rigid-flexible integrated soft finger actuators (RFiSFAs) ,它能夠組裝成為一個仿人手,
簡介:
谷國迎老師課題組設計這個軟抓手不同于傳統的機械手,軟抓手不同之處主要體現在以下幾點:
1)材料:不是由鋼鐵材料制作,而是由多材料(軟硬結合) 3D 列印制成,兼具軟、硬的特性;
2)驅動方式:氣體驅動,
" soft gripper "是目前軟體機器人中研究的熱點之一,由于它是由軟材料制作,因此在一定程度上很難實作多自由度,但此款仿人手可以實作11個自由度,相比于其他軟抓手能夠實作更多的自由度,
本篇文獻主要包括以下三個方面的內容:
(1)Design of the RFiSFA
(2)Modular design of the anthropomorphic hand
(3)Evaluation of the motion and force performance
接下來,我將主要概括第一個方面(Design of the RFiSFA )的主要內容 :結構設計、材料選取、氣囊個數的選取,
1.仿人手整體外觀
該仿人手的整體形狀與人手形狀無異,它能夠實作 11 個自由度(拇指有 3 個自由度,其他四指各有 2 個自由度),這在軟抓手的自由度設計方面已經達到了一個相當大的高度,它能夠穩定地抓取不同的物體,如下圖所示,
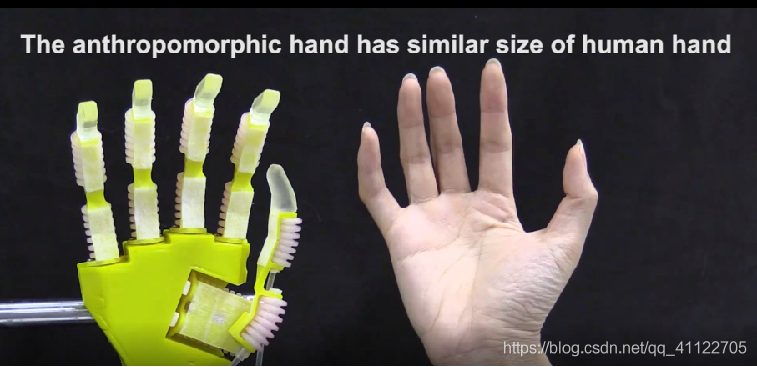

圖 1 仿人手
**2.**結構設計
由于目前已有的大多數的軟抓手都是氣體的驅動方式,因此它們的內部結構設計都有氣室/氣囊,該仿人手的一段指節的設計如下圖所示,an RFiSFA consists of a hollow, flexible bellow-type chamber and two rigid joint levers connected by a flexible but inextensible sheet.
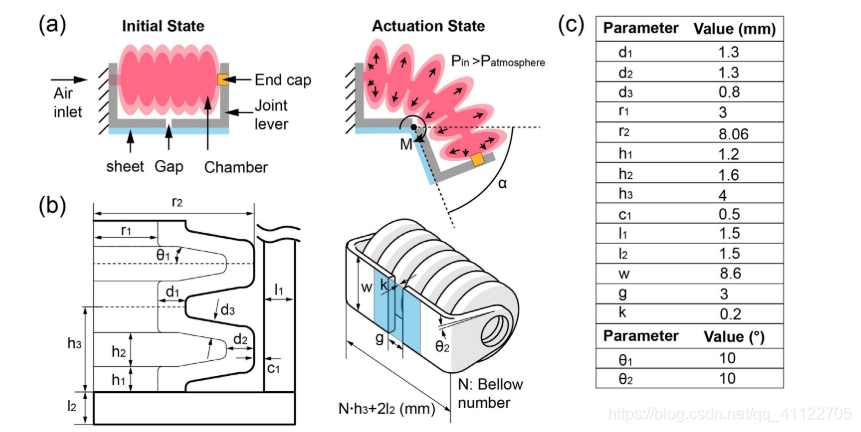
圖 2 仿人手結構設計及各個引數
(圖(a)為手指指節分別在原始狀態和驅動狀態時的狀態,圖(b)為指節的內部結構引數設計,圖(c)為各個引數的值)
3.氣囊材料的選取(The selection of the chamber material)
該仿人手采用多材料 3D 列印方式制作,所用3D 列印設備為Stratasys公司下型號為 J750 的設備,根據該設備能夠列印的材料,實驗中選取了軟材料 Agilus30 和硬度大的 Vero 系列材料相結合而制成,在確定選取最合適的硬度的材料時,實驗中測驗了五種硬度不同的材料:純 Agilus30 (hardness = 30A) 和
an Agilus30-Vero digital materials (hardness = 40A, 50A, 60A, 70A),圖 3 為不同硬度材料所測驗得出來的壓力與應變曲線圖(實驗中測驗次數為 n=3,最后取平均值),由圖可以看出硬度越大的材料在相同的壓力條件下產生的應變越小,但其所承受的壓力也就越大,因此在應變能力與所能夠承受的壓力之間必須折中,為此實驗中采用不同硬度的材料制作了一系列無連接結構的 one-bellow actuators 分別測驗它們的爆裂壓力,如圖 4 所示,由圖 4 可以看出硬度越大的材料其破裂時所需的壓力越大,硬度為60A 和 70A 的氣囊所承受的破裂壓力相差無幾(22.9kPa vs 23.1kPa),然而硬度為 60A 氣囊的 standard deviation (SD) 比 70 A 的更小(1.1kPa vs 2.9kPa),因此選取了硬度為 60A 的材料制作手指的氣囊部分,并設定最大的施加壓力為 16kPa,

圖3 不同硬度材料的壓力與應變曲線圖

圖4 不同硬度的一系列 one-bellow actuators 的破裂壓力
4.氣囊數量的選取(The selection of the bellow number)
因為 bellow number 對 RFiSFAs 的**彎曲角度(flexion angle)、阻力(blocking force)以及氣室的長度(chamber length)**都有影響,因此實驗中綜合這三個方面來選取氣囊的個數,如圖 5 、圖 6 所示分別為不同個數的氣囊與彎曲角度和阻力之間的關系曲線圖,由圖可以看出隨著氣囊數量的增加,RFiSFAs 的彎曲角度和阻力也會隨之增加,

Fig.5. Characterization of the flexion angle of the RFiSFAs with different bellow number. (a) Still images of RFiSFAs with different bellow numbers at 16 kPa. (b) Flexion angle plotted
as a function of the supplied pressure. Error bars represent standard deviation over n = 3 trials.

Fig.6. Characterization of the blocking force of the RFiSFAs with different bellow number. (a) Experimental setup. (b) Blocking force plotted as a function of the supplied pressure. Error bars represent standard deviation over n = 3 trials.
由于氣囊空間的限制,必須在最大彎曲角度/阻力和氣室長度之間折中選取,在實驗中該團隊做了兩種 RFiSFAs仿人手,The first RFiSFA is used to drive the metacarpophalangeal (MCP) joint, the proximal interphalangeal (PIP) joint or the joint for thumb adduction whose maximum flexion angles should be within 60? to 90?.The second RFiSFA is used to drive the joint for thumb circumduction whose maximum flexion angle should be larger than 90? . 為了給這兩種 RFiSFAs 選擇合適的氣室長度,分別測驗了不同個數的氣囊下的最大彎曲角度曲線與和氣室長度曲線(分別用灰色和紅色表示),如圖 7 (a)和(b)所示,由此這兩種 RFiSFAs 分別選擇了 7 bellows和 10 bellows,

Fig.7. Design spaces of the maximum flexion angle and the chamber length. (a) Selection of the first RFiSFA. (b) Selection of the second RFiSFA.
**總結:**該仿人手的 RFiSFA 的設計主要從結構和驅動機制、材料和氣囊的數量這三個方面考慮,結論:RFiSFA 采用氣動的驅動方式,an RFiSFA consists of a hollow, flexible bellow-type chamber and two rigid joint levers connected by a flexible but inextensible sheet;使用由 Agilus 30 和 Vero 系列材料混合而形成的硬度為 60A 的復合材料;制作了兩種 RFiSFAs 分別使用了 7 bellows 和 10 bellows(由這兩種 RFiSFAs 組合而成的 an anthropomorphic hand 我將在接下來的一篇文章中較為詳細地介紹)
最后,希望這篇文章對研究“軟體機器人”的朋友們有幫助,文中或多或少有不足之處,希望大家諒解并留言指正,感興趣的話點擊文獻鏈接閱讀,
文獻下載地址:https://doi.org/10.1016/j.sna.2020. 112090
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/163517.html
標籤:python
上一篇:小白基金購買指南