最近開始接觸 C++ 了,就拿一個 OpenCV 小專案來練練手,在車牌自動識別系統中,從汽車影像的獲取到車牌字符處理是一個復雜的程序,本文就以一個簡單的方法來處理車牌定位,
我國的汽車牌照一般由七個字符和一個點組成,車牌字符的高度和寬度是固定的,分別為90mm和45mm,七個字符之間的距離也是固定的12mm,點分割符的直徑是10mm,
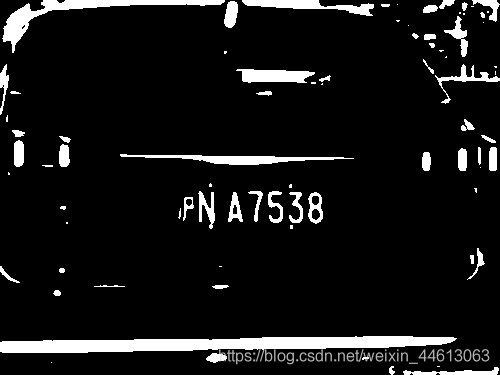
使用的圖片是從百度上隨便找的(侵刪),展示一下原圖和灰度圖:
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/imgproc/types_c.h>
using namespace std;
using namespace cv;
int main() {
// 讀入原圖
Mat img = imread("license.jpg");
Mat gray_img;
// 生成灰度影像
cvtColor(img, gray_img, CV_BGR2GRAY);
// 在視窗中顯示游戲原畫
imshow("原圖", img);
imshow("灰度圖", gray_img);
waitKey(0);
return 0;
}


灰度影像的每一個像素都是由一個數字量化的,而彩色影像的每一個像素都是由三個數字組成的向量量化的,使用灰度影像會更方便后續的處理,
影像降噪
每一副影像都包含某種程度的噪聲,在大多數情況下,需要平滑技術(也常稱為濾波或者降噪技術)進行抑制或者去除,這些技術包括基于二維離散卷積的高斯平滑、均值平滑、基于統計學方法的中值平滑等,這里采用基于二維離散卷積的高斯平滑對灰度影像進行降噪處理,處理后的影像效果如下:

形態學處理
完成了高斯去噪以后,為了后面更加準確的提取車牌的輪廓,我們需要對影像進行形態學處理,在這里,我們對它進行開運算,處理后如下所示:

開運算呢就是先進行 erode 再進行 dilate 的程序就是開運算,它具有消除亮度較高的細小區域、在纖細點處分離物體,對于較大物體,可以在不明顯改變其面積的情況下平滑其邊界等作用,
erode 操作也就是腐蝕操作,類似于卷積,也是一種鄰域運算,但計算的不是加權求和,而是對鄰域中的像素點按灰度值進行排序,然后選擇該組的最小值作為輸出的灰度值,
dilate 操作就是膨脹操作,與腐蝕操作類似,膨脹是取每一個位置鄰域內的最大值,既然是取鄰域內的最大值,那么顯然膨脹后的輸出影像的總體亮度的平均值比起原圖會有所上升,而影像中較亮物體的尺寸會變大;相反,較暗物體的尺寸會減小,甚至消失,
閾值分割
完成初步的形態學處理以后,我們需要對影像進行閾值分割,我們在這里采用了 Otsu 閾值處理,處理后的效果如下所示:
對影像進行數字處理時,我們需要把影像分成若干個特定的、具有獨特性質的區域,每一個區域代表一個像素的集合,每一個集合又代表一個物體,而完成該程序的技術通常稱為影像分割,它是從影像處理到影像分析的關鍵步驟,其實這個程序不難理解,就好比我們人類看景物一樣,我們所看到的世界是由許許多多的物體組合而成的,就像教室是由人、桌子、書本、黑板等等組成,我們通過閾值處理,就是希望能夠從背景中分離出我們的研究物件,
邊緣檢測
經過Otsu閾值分割以后,我們要對影像進行邊緣檢測,我們這里采用的是Canny邊緣檢測,處理后的結果如下:
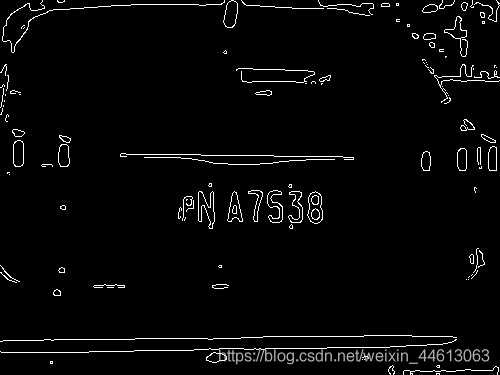
接下來再進行一次閉運算和開運算,填充白色物體內細小黑色空洞的區域并平滑其邊界,處理后的效果如下:
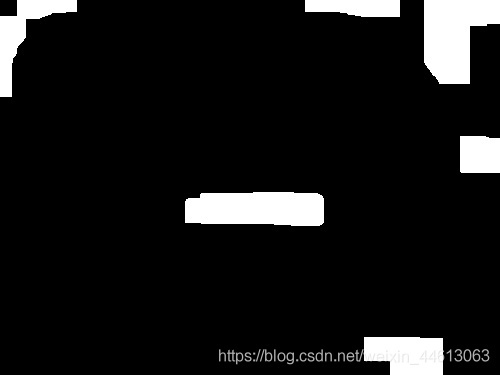
這個時候,車牌的輪廓已經初步被選出來了,只是還有一些白色塊在干擾,
上述程序的代碼:
// 得出輪廓
bool contour(Mat image, vector<vector<Point>> &contours, vector<Vec4i> &hierarchy) {
Mat img_gau, img_open, img_seg, img_edge;
// 高斯模糊
GaussianBlur(image, img_gau, Size(7, 7), 0, 0);
// 開運算
Mat element = getStructuringElement(MORPH_RECT, Size(23, 23));
morphologyEx(img_gau, img_open, MORPH_OPEN, element);
addWeighted(img_gau, 1, img_open, -1, 0, img_open);
// 閾值分割
threshold(img_open, img_seg, 0, 255, THRESH_BINARY + THRESH_OTSU);
// 邊緣檢測
Canny(img_seg, img_edge, 200, 100);
element = getStructuringElement(MORPH_RECT, Size(22, 22));
morphologyEx(img_edge, img_edge, MORPH_CLOSE, element);
morphologyEx(img_edge, img_edge, MORPH_OPEN, element);
findContours(img_edge, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point());
return true;
}
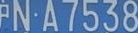
選取輪廓
現在我們已經有了輪廓,我們需要篩選出車牌所在的那個輪廓,由于車牌寬和高的比例是固定的,依據這個幾何特征,我們進行篩選,效果如圖:

代碼如下:
// 車牌輪廓點
Point2f(*choose_contour(vector<vector<Point>> contours))[2] {
int size = (int)contours.size();
int i_init = 0;
static Point2f contour[4][2];
Point2f (*contours_result)[2] = new Point2f[size][2];
for (int i = 0; i < size; i++){
// 獲取邊框資料
RotatedRect number_rect = minAreaRect(contours[i]);
Point2f rect_point[4];
number_rect.points(rect_point);
float width = rect_point[0].x - rect_point[1].x;
float height = rect_point[0].y - rect_point[3].y;
// 用寬高比篩選
if (width < height) {
float temp = width;
width= height;
height = temp;
}
float ratio = width / height;
if (2.5 < ratio && ratio < 5.5) {
contours_result[i_init][0] = rect_point[0];
contours_result[i_init][1] = rect_point[2];
i_init++;
}
}
return contours_result;
}
// 截取車牌區域
int license_gain(Point2f (*choose_license)[2], Mat img) {
int size = (int)(_msize(choose_license) / sizeof(choose_license[0]));
// 繪制方框
for (int i = 0; i < size; i++) {
if ((int)choose_license[i][0].x > 1 && (int)choose_license[i][0].y > 1) {
int x = (int)choose_license[i][1].x;
int y = (int)choose_license[i][1].y;
int height = (int)(choose_license[i][0].x) - (int)(choose_license[i][1].x);
int width = (int)(choose_license[i][0].y) - (int)(choose_license[i][1].y);
//cout << height << " " << width << endl;
Rect choose_rect(x, y, height, width);
Mat number_img = img(choose_rect);
rectangle(img, choose_license[i][0], choose_license[i][1], Scalar(0, 0, 255), 2, 1, 0);
imshow("車牌單獨顯示" + to_string(i), number_img);
}
}
imshow("繪制方框", img);
return 0;
}
最后的 main 函式:
int main() {
// 讀入原圖
Mat img = imread("license.jpg");
Mat gray_img;
// 生成灰度影像
cvtColor(img, gray_img, CV_BGR2GRAY);
// 得出輪廓
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
contour(gray_img, contours, hierarchy);
// 截取車牌
Point2f (*choose_license)[2] = choose_contour(contours);
license_gain(choose_license, img);
delete [] choose_license;
waitKey(0);
return 0;
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/200365.html
標籤:python