十一長假后,同學們陸續開始做題,現在月底了,擴展題“-二值矩陣避障最短路徑演算法”只有7人上交了作業,其中能夠運行的有2人,分別是電子18級邵華薇同學、軟工18級唐宇,這里提出表揚,
題目可能是有些難度,是我的責任,不過,即使做不完,大家以后還是應該提交一個版本的代碼,讓老師們知道大家已經在思考了,如果不抓住本科難得的時間,沒有作業壓力的情況下專心思考,今后步入公司后,壓力會更大,
題目:一個迷宮,用64x64的二維陣串列示,值為1的元素表示平地,值為0的表示磚墻,現在,給定起點、終點,要求從起點走到終點,盡可能走最短距離,走位要求:在空白區域,可以朝著任意方向走,只要不碰到磚墻即可,
我們可以把這個題目分為兩部分,第一部分,是如何走到終點;第二部分,是距離盡可能的短,對于如何走到終點的問題,可以使用啟發搜索的演算法;第二部分,在第一部分的基礎上,做直線歸并,
我把兩位同學的代碼整合為一個demo,參見 https://codechina.csdn.net/coloreaglestdio/qtcpp_demo/-/tree/master/floodfill_mdf ,
1. 找到一條路徑
這里采用邵華薇同學的演算法稍加改進,分為反向探路、前向回溯兩步,
反向探路:
1、首先從終點開始,朝著東南西北四個方向步進,每次只走一格,
2、每個走到的空白格子里,填寫當前的步數,
3、以當前走到的位置為種子,遞增步數,重復上述程序,直到找到起點為止,
記錄步數的矩陣需要獨立設定,障礙物、沒有走到的區域全部初始化為無窮大,
前向回溯:
從起點開始,從當前位置沿著8個方向(東南西北、東南、東北、西北、西南)尋找步數最小的一個格子,記錄下來,并挪動當前位置到該格子,直到回到終點,
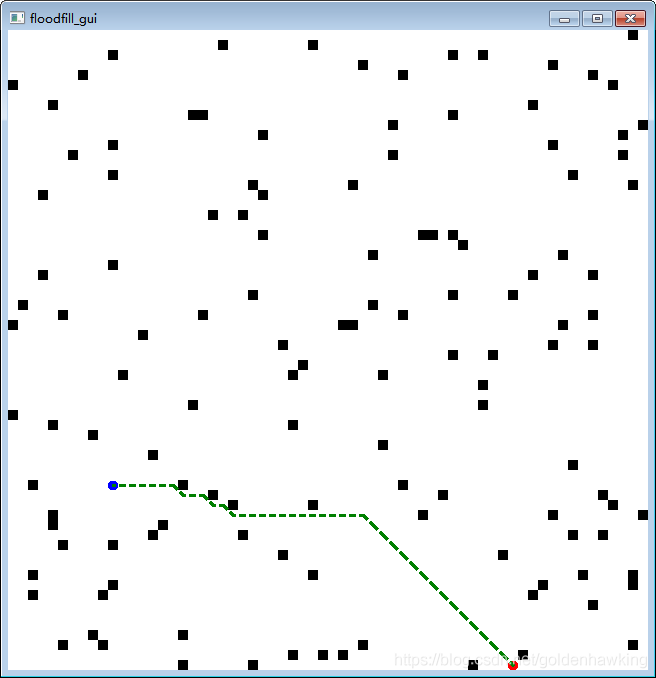
通過這兩步,就可以找到一條路徑,如下圖所示:
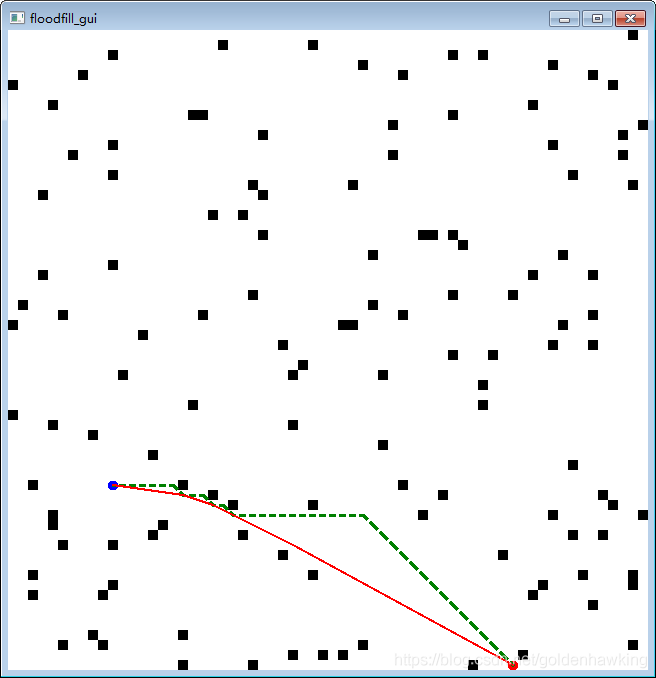
2.歸并直線路徑
由于上述尋找的方向只是8個方向,顯然路徑中存在更短的捷徑,找直線的方法,可以直接使用唐宇的思路,即窮盡法,當然,還有更有啟發性的梯度下降,但同學們首先還是應該掌握簡單的方法,
原理:不斷的試探路線上的兩點連線會不會被方塊阻礙,如不會,則合并連線,產生新的軌跡,程式中有幾個小的優化,用于在障礙周圍精細地規避,以及避免整形舍入的誤差,
3. 代碼
這里只貼出矩陣處理的關鍵代碼,繪圖代碼從 倉庫 簽出,
/*!
* \brief mdf_rev_fill 反向搜索,從終點處找起點
* \param v_mat 障礙地形,1是平地,0是墻
* \param startx 開始位置x
* \param starty 開始位置y
* \param endx 結束位置x
* \param endy 結束位置y
* \param p_rev 保存搜索步長的v_mat等尺寸矩陣
* \return 能否找到起點
*/
bool mdf_rev_fill(
const std::vector<std::vector<char> > & v_mat ,
const int startx,
const int starty,
const int endx,
const int endy,
std::vector<std::vector<unsigned int> > * p_rev
)
{
std::vector<std::vector<unsigned int> > & v_rev = *p_rev;
p_rev->clear();
const int rows = v_mat.size();
const int cols = v_mat[0].size();
for (int i=0;i<rows;++i)
{
std::vector<unsigned int> row;
row.resize(cols,0xffffffffu);
p_rev->push_back(std::move(row));
}
//反向著色
std::list<int> currX,currY;
unsigned int step = 1;
currX.push_back(endx);
currY.push_back(endy);
v_rev[endy][endx] = 0;
bool arrival = false;
while (currX.size() && !arrival)
{
const int rev_dirt[4][2] = {
{1,0},{0,1},{-1,0},{0,-1}
};
const int tasks = currX.size();
for (int t = 0; t< tasks&& !arrival; ++t)
{
const int cx = *currX.begin();
const int cy = *currY.begin();
currX.pop_front();
currY.pop_front();
for (int i=0;i<4&& !arrival;++i)
{
const int nx = cx + rev_dirt[i][0];
const int ny = cy + rev_dirt[i][1];
if (nx == startx && ny == starty)
arrival = true;
if (nx >= cols || nx < 0)
continue;
if (ny >= rows || ny < 0)
continue;
if (v_mat[ny][nx]==0)
continue;
if (v_rev[ny][nx]<0xffffffffu)
continue;
v_rev[ny][nx] = step;
currX.push_back(nx);
currY.push_back(ny);
}//end for (int i=0;i<4&& !arrival;++i)
}//end for (int t = 0; t< tasks&& !arrival; ++t)
++step;
}//end while (currX.size() && !arrival)
return arrival;
}
/*!
* \brief mdf_path_find 前向搜索路徑
* \param v_rev 反向尋找后生成的距離矩陣
* \param startx 起點x
* \param starty 起點y
* \param cx 存盤路徑坐標的x向量
* \param cy 存盤路徑坐標的y向量
* \return 是否成功搜索生成路徑
*/
bool mdf_path_find(
std::vector<std::vector<unsigned int> > & v_rev,
const int startx,
const int starty,
std::vector<int> * cx,
std::vector<int> * cy
)
{
const int rows = v_rev.size();
const int cols = v_rev[0].size();
unsigned int v = v_rev[starty][startx];
cx->clear();
cy->clear();
cx->push_back(startx);
cy->push_back(starty);
int tx = startx, ty= starty;
v_rev[ty][tx] = 0xffffffffu;
while (v>0 && v < 0xffffffffu)
{
const int rev_dirt[8][2] = {
{1,0},{0,1},{-1,0},{0,-1},
{1,1},{-1,1},{1,-1},{-1,-1}
};
unsigned int minv = 0xffffffffu;
int mind = 0;
for (int i=0;i<8;++i)
{
const int nx = tx + rev_dirt[i][0];
const int ny = ty + rev_dirt[i][1];
if (nx >= cols || nx < 0)
continue;
if (ny >= rows || ny < 0)
continue;
if (v_rev[ny][nx]<minv)
{
minv = v_rev[ny][nx];
mind = i;
}
}
v = minv;
tx += rev_dirt[mind][0];
ty += rev_dirt[mind][1];
cx->push_back(tx);
cy->push_back(ty);
assert(tx>=0 && tx < cols);
assert(ty>=0 && ty < rows);
}
return (v==0);
}
/*!
* \brief min_dis_opt 歸并路徑縮短距離
* \param v_mat 障礙地形,1是平地,0是墻
* \param rx 非最優路徑x(直接搜索出來的)
* \param ry 非最優路徑y(直接搜索出來的)
* \param cx 較優路徑x
* \param cy 較優路徑y
* \param pidx 關鍵waypoint下表(相對于cx,cy),連接兩個下標的cx,cy的為直線,
* \return 優化后路徑大小
*/
int min_dis_opt(
const std::vector<std::vector<char> > & v_mat ,
const std::vector<int> & rx,
const std::vector<int> & ry,
std::vector<int> * cx,
std::vector<int> * cy,
std::vector<int> * pidx
)
{
const int rows = v_mat.size();
const int cols = v_mat[0].size();
std::vector<int> lx = rx, ly = ry;
std::set<int> important ;
size_t test_begin = 0;
//本次最差的目標
int opt_tar = test_begin + 2;
important.insert(test_begin);
while (test_begin < lx.size()-2)
{
int test_cur = test_begin + 2;
const int pns = lx.size();
bool good = true;
while (test_cur < pns && good)
{
const int x1 = lx[test_begin], y1 = ly[test_begin],x2 = lx[test_cur], y2 = ly[test_cur];
const int dx1 = (x2 - x1), dy1 = (y2 - y1);
const int absx = dx1>=0?dx1:-dx1, absy = dy1>=0?dy1:-dy1;
const int maxp = (absx + absy) * 3;
for (int i=0;i<maxp && good;++i)
{
//為不打擦邊球,要求周圍1格子也沒有障礙才能優化,
for (int d = 0; d< 5 && good; ++d)
{
const int rev_dirt[9][2] = {
{0,0},
{1,0},{0,1},{-1,0},{0,-1},
{1,1},{-1,1},{1,-1},{-1,-1}
};
const int tx = x1 + (i * dx1 ) / (maxp-1) + rev_dirt[d][0];
const int ty = y1 + (i * dy1 ) / (maxp-1) + rev_dirt[d][1];
if (tx >= cols || tx < 0)
continue;
if (ty >= rows || ty < 0)
continue;
if (v_mat[ty][tx] == 0)
good = false;
if (tx ==x1 && ty==y1)
break;
if (tx ==x2 && ty==y2)
break;
}
}
if (!good)
break;
++test_cur;
}
if (test_cur > opt_tar)
{
important.insert(test_begin);
std::vector<int> newx, newy;
for (size_t i=0;i<test_begin;++i)
{
newx.push_back(lx[i]);
newy.push_back(ly[i]);
}
const int x1 = lx[test_begin], y1 = ly[test_begin],x2 = lx[test_cur-1], y2 = ly[test_cur-1];
const int dx1 = (x2 - x1), dy1 = (y2 - y1);
const int absx = dx1>=0?dx1:-dx1, absy = dy1>=0?dy1:-dy1;
const int maxp = (absx + absy) * 3;
int last_x = -1, last_y = -1;
for (int i=0;i<maxp;++i)
{
const int tx = x1 + (i * dx1) / (maxp-1);
const int ty = y1 + (i * dy1) / (maxp-1);
if (tx != last_x || ty !=last_y)
{
last_x = tx;
last_y = ty;
assert(tx>=0 && tx < cols);
assert(ty>=0 && ty < rows);
assert(v_mat[ty][tx]);
newx.push_back(tx);
newy.push_back(ty);
}
}
//下次務必從這里開始
opt_tar = newx.size();
for (int i=test_cur;i<pns;++i)
{
newx.push_back(lx[i]);
newy.push_back(ly[i]);
}
lx = std::move(newx);
ly = std::move(newy);
}
if (good)
break;
++test_begin;
}
important.insert(lx.size()-1);
*cx = std::move(lx);
*cy = std::move(ly);
pidx->clear();
for (auto p : important)
{
pidx->push_back(p);
}
return cx->size();
}
/*!
* \brief min_distance_find 避障路徑搜索函式
* \param v_mat 障礙地形,1是平地,0是墻
* \param startx 起點x
* \param starty 起點y
* \param endx 終點x
* \param endy 終點y
* \param x 路徑x
* \param y 路徑y
* \param pidx 關鍵waypoint下表(相對于cx,cy),連接兩個下標的cx,cy的為直線,
* \param join 是否做直線歸并優化,
* \return cx大小
*/
int min_distance_find(
const std::vector<std::vector<char> > & v_mat ,
const int startx,
const int starty,
const int endx,
const int endy,
std::vector<int> *x,
std::vector<int> *y,
std::vector<int> * pidx,
bool join
)
{
std::vector<std::vector<unsigned int> > v_rev ;
if (!mdf_rev_fill(v_mat,startx,starty,endx,endy, &v_rev))
return false;
std::vector<int> cx,cy;
if (!mdf_path_find(v_rev,startx,starty,&cx,&cy))
return false;
if (join)
return min_dis_opt(v_mat,cx,cy,x,y,pidx);
size_t sz = cx.size();
pidx->clear();
for (size_t i=0;i<sz;++i)
pidx->push_back(i);
*x = std::move(cx);
*y = std::move(cy);
return x->size();
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/200714.html
標籤:python