前言:
利用兩塊Arduino開發板來分別制作遙控裝置和接收裝置,兩者之間使用無線模塊進行通信,從而實作對航模包括拉高、拉低、左轉、右轉的姿態控制,
材料準備:
SU-27航模(慷訓)、Arduino開發板X2(這里使用的是UNO和MEGA2560)、HC-12無線通信模塊X2、A2212無刷電機(1400KV、8060槳葉)、無刷電調(30A)、動力鋰電池(3S、2200mAh、40C)、SG90舵機X2(9g)、JoyStick搖桿X2、杜邦線若干
硬體結構:
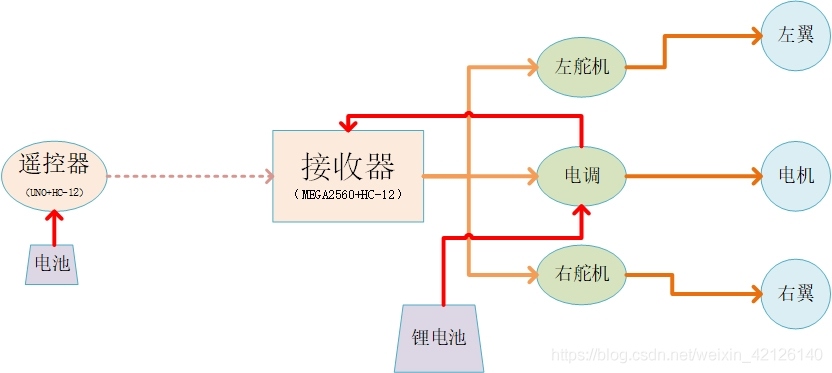
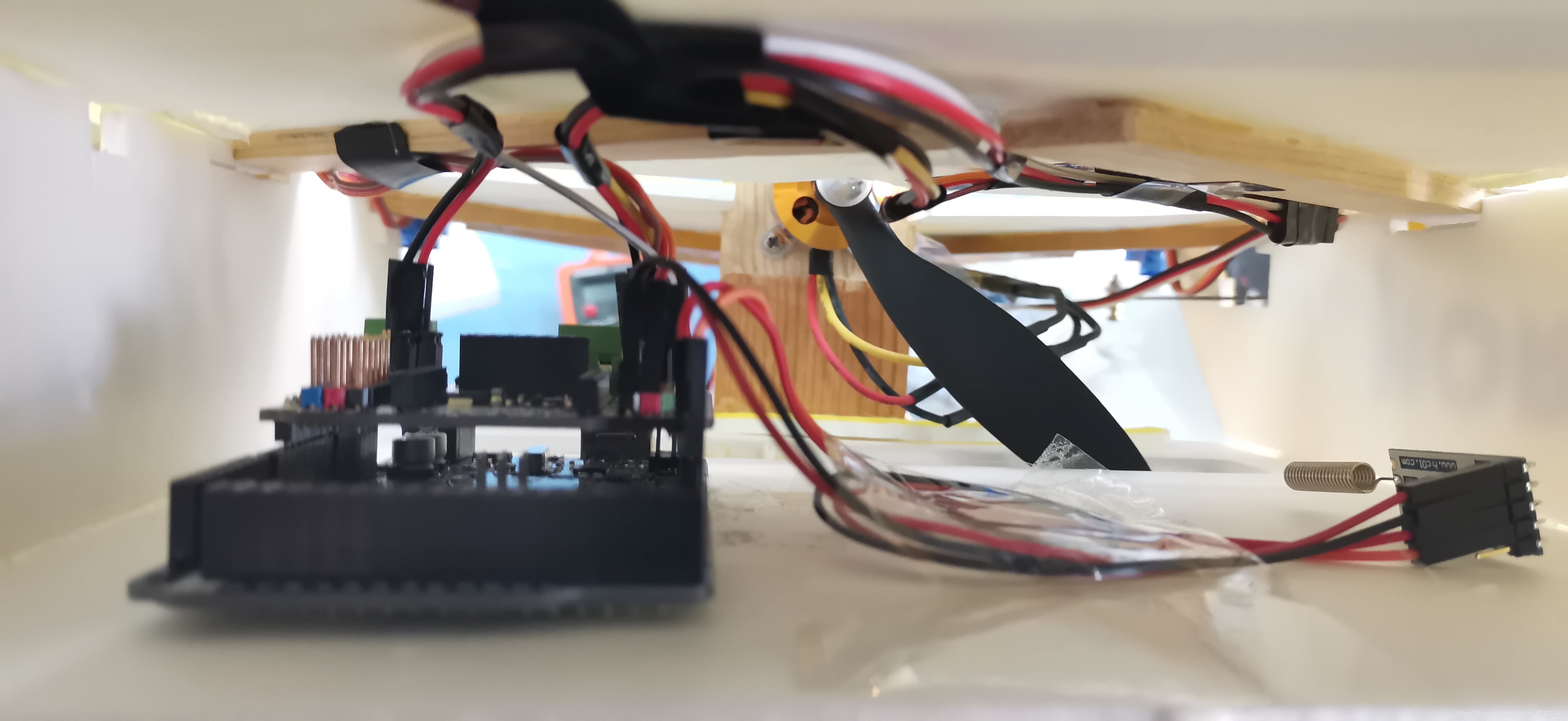
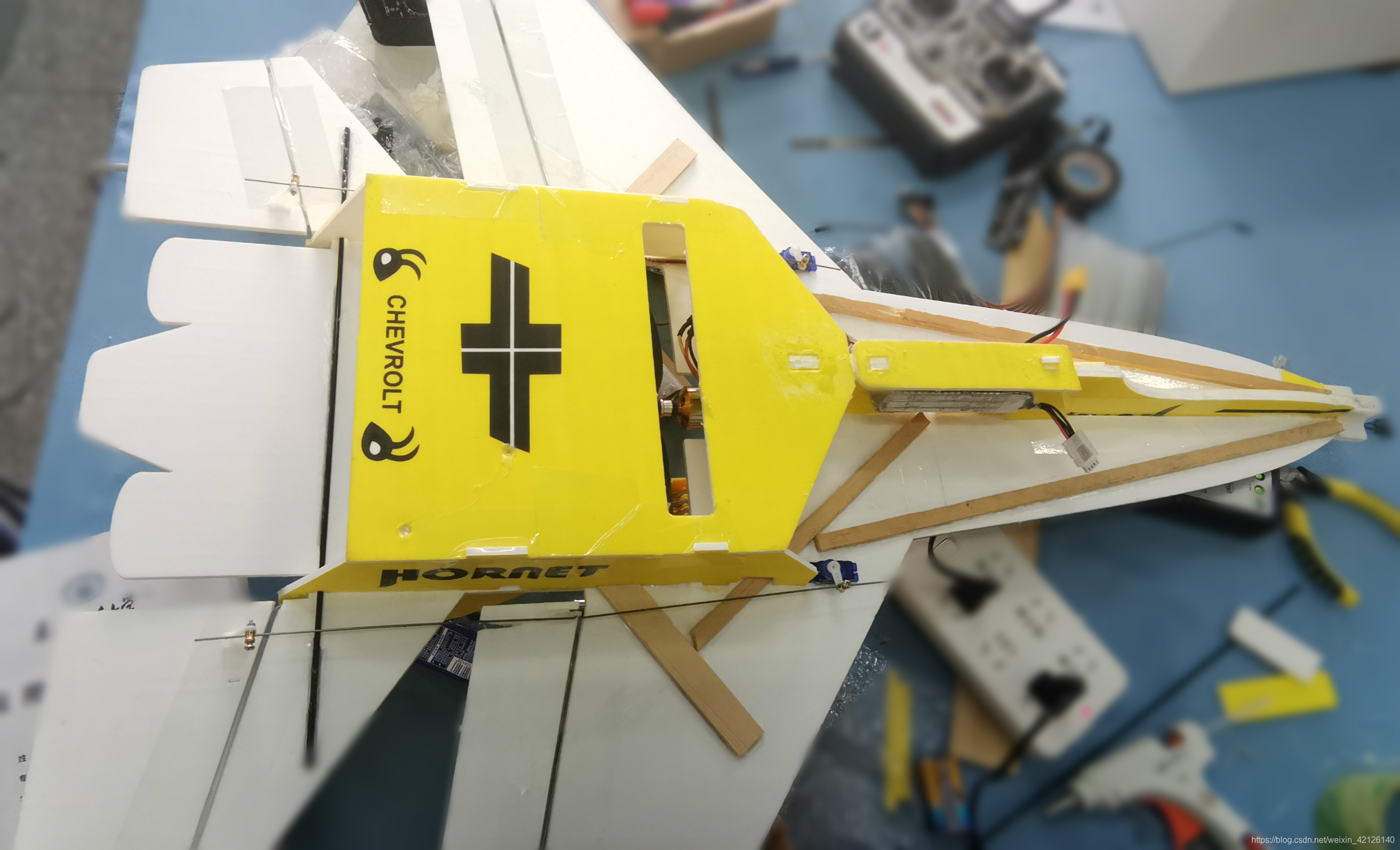
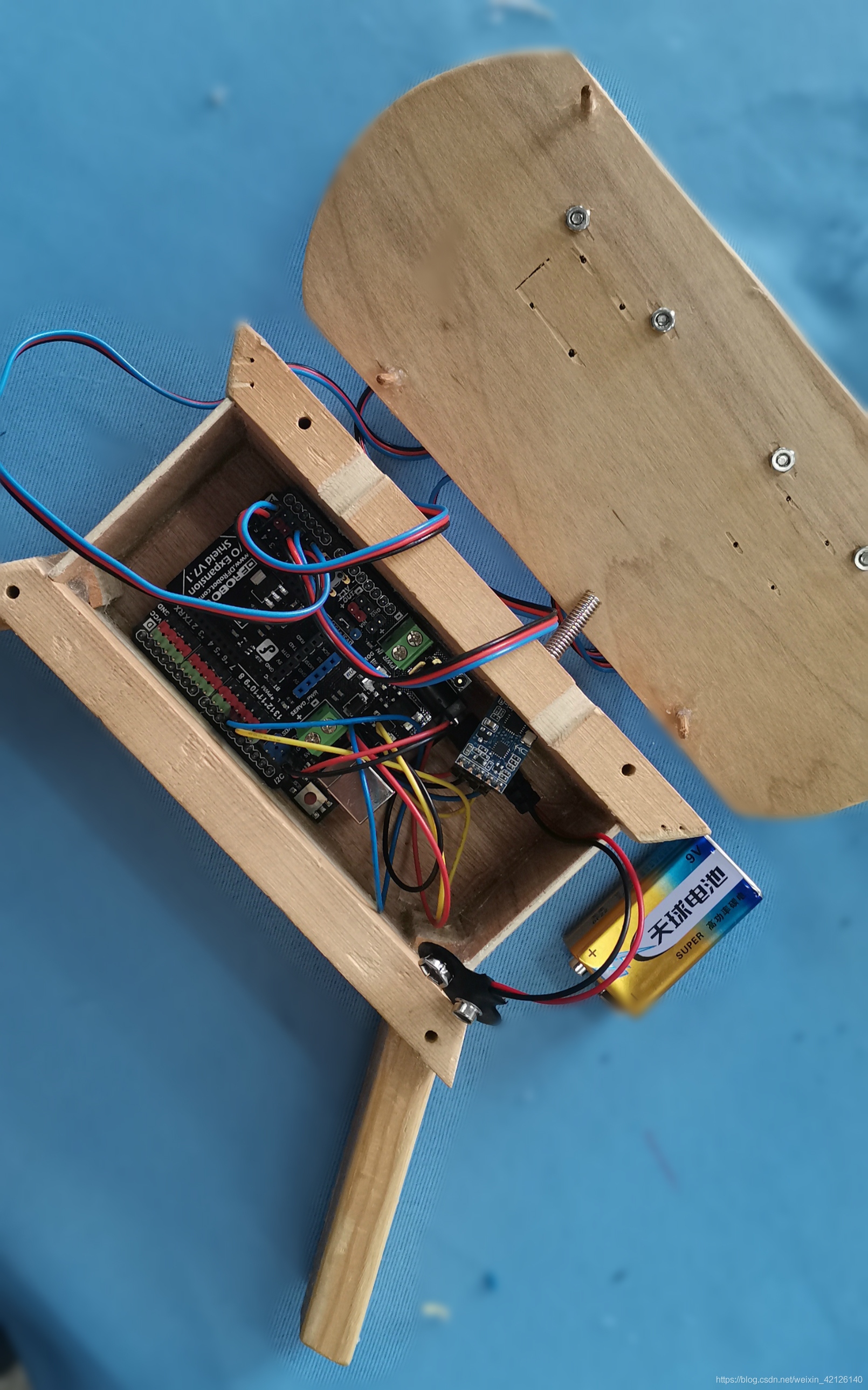
實物圖:
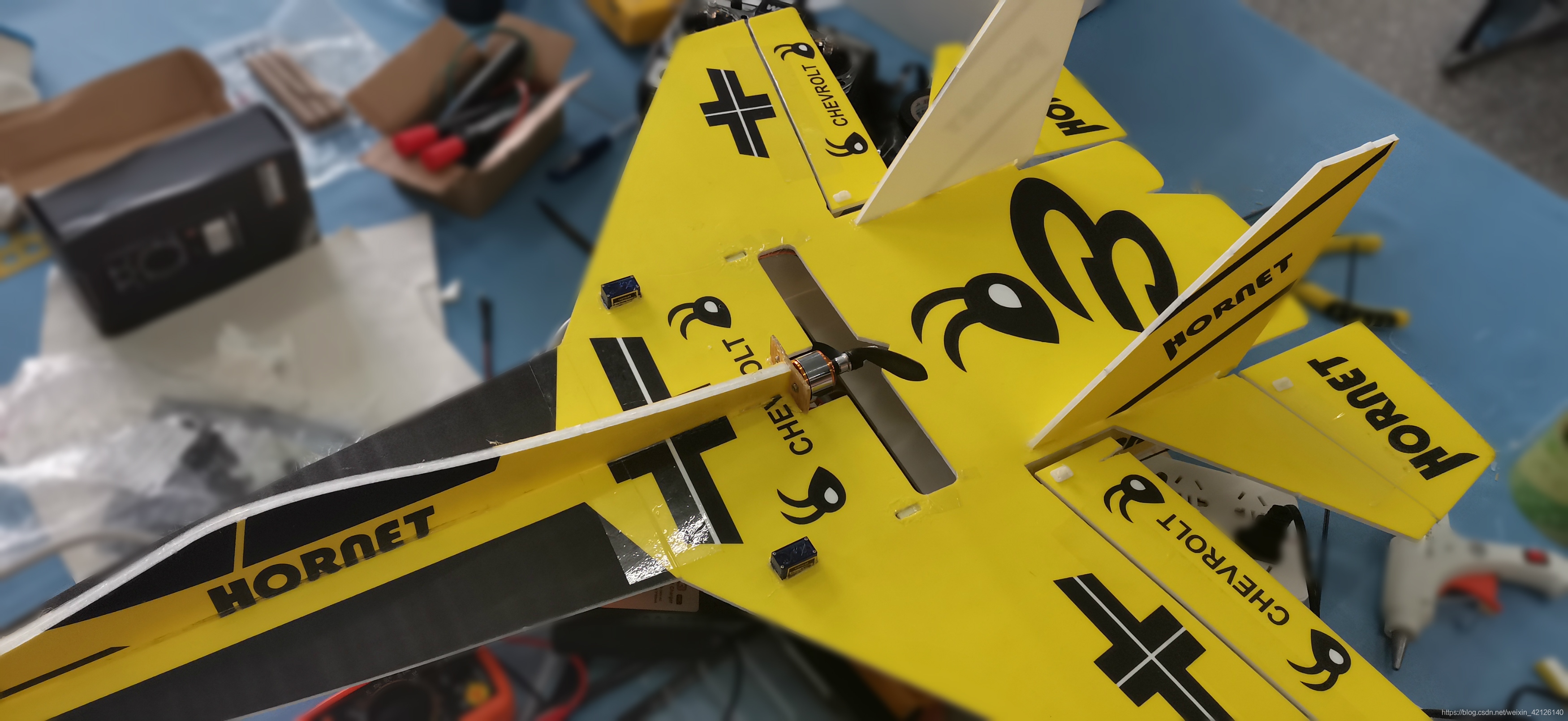

用木條加固了機翼
拿木頭做的遙控器外殼
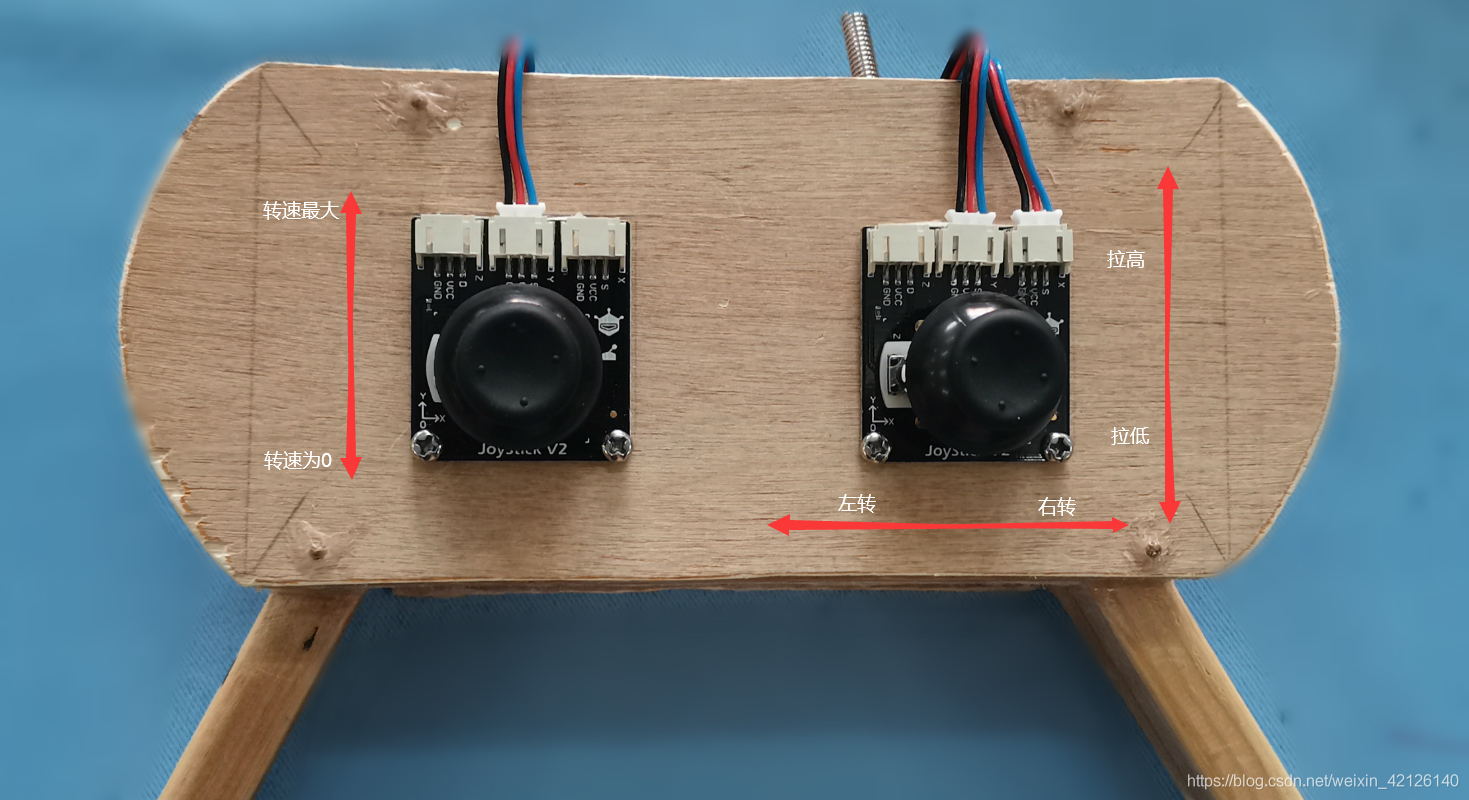

程式設計:
發送端:
/*
send.ino
*/
#include <SoftwareSerial.h>//使用了軟串口庫
//三個引腳名稱宏定義
#define power_pin A0//獲取油門控制數值的引腳
#define fly_pin A5//獲取拉高拉低數值的引腳
#define turn_pin A2//獲取左右轉向數值的引腳
//實體化軟串口物件
SoftwareSerial mySerial(10, 11); // RX, TX
//初始值賦值
int last_power_val=510;
int last_fly_val=500;
int last_turn_val=510;
void setup() {
Serial.begin(9600);
mySerial.begin(9600);
}
void loop() {
//讀取三個引腳的數值
int power_val=analogRead(power_pin);
int fly_val=analogRead(fly_pin);
int turn_val=analogRead(turn_pin);
//輸出數值便于監測
Serial.println(power_val);
Serial.println(fly_val);
Serial.println(turn_val);
//當前后兩次讀取的數值差值超過10就發送一次資料
if(abs(power_val-last_power_val)>10){
mySerial.print("pow"+(String)power_val);
last_power_val=power_val;//保存本次讀取的數值
delay(50);//避免串口資料同時發送導致讀取出錯
}
if(abs(fly_val-last_fly_val)>10){
mySerial.print("fly"+(String)fly_val);
last_fly_val=fly_val;
delay(50);
}
if(abs(turn_val-last_turn_val)>10){
mySerial.print("tur"+(String)turn_val);
last_turn_val=turn_val;
delay(50);
}
//避免串口資料量過大導致接收出錯
delay(500);
}
接收端:
#include <Servo.h>//使用舵機庫來控制電調和舵機
//電調和舵機引腳名稱定義
#define pow_servo_pin 9
#define left_servo_pin 11
#define right_servo_pin 12
//油門物件
Servo pow_servo;
//左舵機物件
Servo left_servo;
//右舵機物件
Servo right_servo;
//輸出的數值初始化為0
int power_val=0;
int fly_val=0;
int turn_val=0;
void setup() {
Serial.begin(9600);
//mySerial.begin(9600);
Serial3.begin(9600);
pow_servo.attach(pow_servo_pin,1000,2000);//設定電調的PWM信號頻率
left_servo.attach(left_servo_pin);
right_servo.attach(right_servo_pin);
delay(2000);
}
void loop() {
//從緩沖區讀取收到的字串
String str="";
while(Serial3.available()){
char ch=(char)Serial3.read();
str+=ch;
delay(2);
}
if(str.length()>0){
//截取識別符號和有效資料
String key=str.substring(0,3);
String value=str.substring(3,str.length());
//Serial.println(str);
//獲取油門數值
if(key=="pow"){
power_val=getInt(value);
power_val=map(power_val,0,1023,0,180);
pow_servo.write(power_val);
Serial.print("power:");
Serial.println(power_val);
}
//獲取拉高拉低數值
if(key=="fly"){
fly_val=getInt(value);
fly_val=map(fly_val,0,1023,0,160);
fly_val=160-fly_val;
left_servo.write(fly_val);
right_servo.write(fly_val);
Serial.print("fly:");
Serial.println(fly_val);
}
//獲取左右轉向數值
if(key=="tur"){
turn_val=getInt(value);
if(turn_val>510){
turn_right(turn_val);
}
if(turn_val<510){
turn_left(turn_val);
}
// Serial.print("turn:");
// Serial.println(turn_val);
}
}
}
//左轉函式
void turn_left(int x){
int x1=map(x,0,510,0,110);
int x2=(int)(110+(510-x)*50/500);
//int x2=(int)160-0.1*x;
right_servo.write(x1);
left_servo.write(x2);
Serial.println("**************************");
Serial.println("Turn left:");
Serial.print("left_servo:");
Serial.println(x2);
Serial.print("right_servo:");
Serial.println(x1);
Serial.println("**************************");
}
//右轉函式
void turn_right(int x){
int x1=map(x,510,1023,110,160);
int x2=(int)(110-(x-510)*50/(1023-510));
//int x2=(int)160-0.1*x;
right_servo.write(x1);
left_servo.write(x2);
Serial.println("**************************");
Serial.println("Turn right:");
Serial.print("left_servo:");
Serial.println(x2);
Serial.print("right_servo:");
Serial.println(x1);
Serial.println("**************************");
}
//字串轉整數函式
int getInt(String str){
int num=0;
for(int i=0;i<str.length();i++){
num*=10;
num+=str[i]-'0';
}
return num;
}
//拉高:兩側機翼全部向上翻轉
//拉低:兩側機翼全部向下翻轉
//左轉:左側機翼下翻,右側機翼上翻
//右轉:左側機翼上翻,右側機翼下翻
//經過實測,在此航模上舵機的轉動
//角度在0—160的范圍內,即可實
//現機翼的上下完全翻轉
最后,經過多次的測驗、修改、試飛,它真的比較好的飛起來了!

這是一件很有意思、很讓人激動的事情!
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/209700.html
標籤:java
上一篇:RT-Thread Studio 輸出PWM詳細教程
下一篇:STM32嵌入式應用系統設計