前期介面設計用的是Vivado18.3+Modelsim10.6,邏輯綜合及版圖生成的環境是Ubuntu16,邏輯綜合用的工具Design Compiler,生成版圖用的工具是Encounter,
下面是關于我做的CameraLink介面的ASIC邏輯綜合和版圖設計流程,重點介紹了邏輯綜合程序:
(1)CameraLink介面實作
(2)功能仿真
(3)邏輯綜合
(4)布局布線及版圖生成
(5)后仿真
1、CameraLink介面實作
1.1、介面設計
Camera Link介面標準是數字相機和影像采集卡的規范說明,讓兩者之間能夠以High-Speed的速率進行多bit影像資料及使能信號、四對LVDS通用相機控制信號及兩對LVDS異步串行通信信號等信號的傳輸,其技術在低壓差分信號LVDS傳輸的基礎上加載了串并轉換器,能夠實作資料傳輸的可靠性,Camera Link標準技術是在National Semiconductor公司下的Channel Link標準技術下發展而來的,CameraLink標準在ChannelLink標準下的視頻信號的基礎上又多加了6對LVDS,在Camera Link Base/Medium/Full模式下,4對用于相機輸入與影像采集卡輸出的資料傳輸信號,另外2對用于拍攝相機設備和影像采集卡之間的異步串行通信,在標準的CameraLink介面中,數字影像相機信號分為:基于ChannelLink標準的視頻影像資料(PortA-PortH)及使能信號(Fval、Lval、Dval及Spare)、相機控制LVDS信號對(CC1-CC4)、異步串行通信LVDS信號對(SerTFG、SerTC),標準Camera Link協議一總定義10個埠,每一個埠都是8位,其中bit0被定義為最低位,bit7定義為最高位,而其中的視頻影像資料信號埠又與相機的配置模式相關,相機的配置不同,Camera Link所用到的芯片數量就會不同,而且所用的Cameralink介面物理連接器的數量也會不同,具體如表1所示:
表1介面配置對應相應數值
|
Camera Link 介面配置 |
埠 |
資料位寬(Max) |
芯片 |
連接器 |
|
Base |
A~C |
28 |
1 |
1 |
|
Medium |
A~F |
56 |
2 |
2 |
|
Full |
A~H |
84 |
3 |
2 |
1.2、CameraLink資料輸出具體實作
Camera Link介面配置選擇為Base,而在Base模式下,可以使用1~3×8-bit、1~2×10-bit、1~2×12-bit、14-bit、16-bit及24-bitRGB的Bit assignments,而對于整個系統而言,將使用Base配置下28位總位寬的16-bit,以滿足16位像素資料的輸入要求,
在Base配置下,Camera Link的視頻影像資料信號如表2所示:
表2 Base配置下的視頻影像資料信號
|
視頻影像資料信號 |
位數 |
描述 |
|
Date |
24 |
影像資料 |
|
FVAL |
1 |
幀有效信號 |
|
LVAL |
1 |
行有效信號 |
|
DVAL |
1 |
資料輸出有效信號 |
|
SPARE |
1 |
備用信號 |
在Camera Link介面實作中,依據視頻資料信號時序圖來進行資料的傳輸,主時鐘CLKcamera信號的上升沿采集資料,通過對FVAL、LVAL及DVAL的進行時序的操作,設計中選擇了640×512的影像解析度及幀頻F幀頻=100Hz的資料輸出,為了實作100Hz幀頻需要確定行有效像素時鐘周期個數A=640和行無效時鐘周期個數Q及幀無效時鐘周期個數C,具體的的實作如下計算:F幀頻= CLKcamera (MHz)/{512×(A+Q)+C},最后主控FPGA將12位并行資料信號和依據F幀頻產生的FVAL、LVAL及DVAL送入Camera Link介面Camera Link視頻資料信號時序如圖1所示:
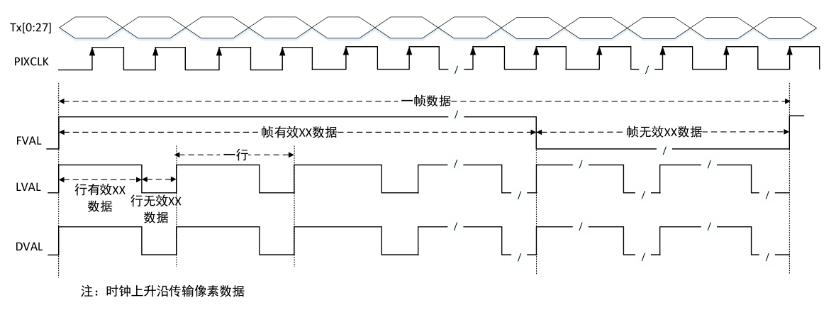
圖1 Camera Link視頻資料信號時序圖
2、功能仿真
在Camera Link模塊的仿真中,加載了CMLink_ctrl和CMLink模塊,通過16 bit像素值dat信號輸入至CMLink模塊,結合camera_pause、empty、read_en使能等信號按照《Camera Link Specifications v2.0》手冊將16 bit像素值信號轉換至28 bit并行tx資料進行像素輸出,如16’h01c2轉換至28’hf0000a2,介面需要在視頻幀有效信號fvalReg、行有效信號lvalReg及資料有效信號dvalReg處于高電平時進行像素資料的傳輸,其中fvalReg、dvalReg、lvalReg、dat、tx信號仿真如圖2所示:



3、邏輯綜合
邏輯綜合分為三個階段: (1)、轉譯(Translation):把電路轉換為 EDA 內部資料庫,這個資料庫跟工藝 庫是獨立無關的; (2)、優化(Optimozation):根據作業頻率、面積、功耗來對電路優化,來推斷 出滿足設計指標要求的門級網表; (3)、映射(Mapping):將門級網表映射到晶圓廠給定的工藝庫上,最終形成 該工藝庫對應的門級網表,綜合是完成從RTL代碼到門級電路的轉換,如果在綜合時,鏈接了廠家的庫檔案,則門級電路使用的器件是廠家庫檔案中提供的器件,綜合在整個IC設計中,起到的作用如圖4所示,
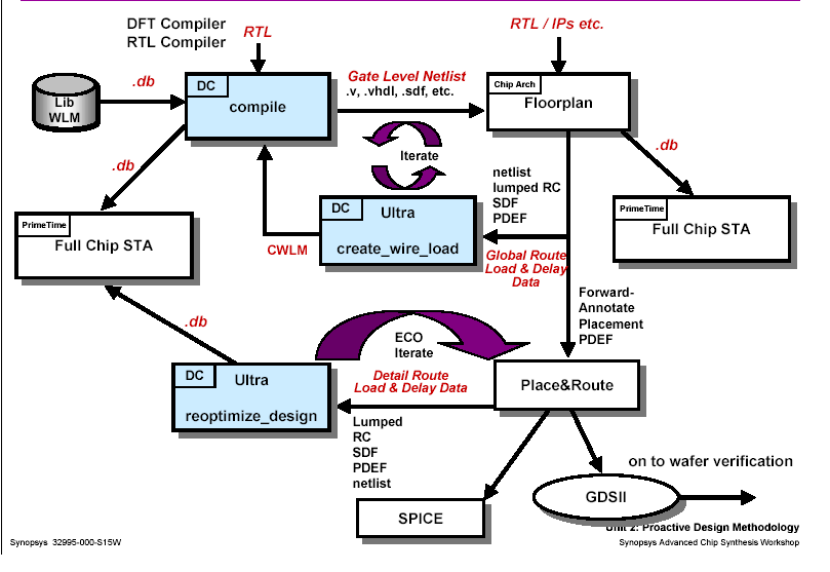
圖 4 綜合在IC設計中的作用
3.1 綜合的特性
3.1.1 綜合是由約束驅動的
對于一個設計來說,在進行綜合前,需要給這個設計加上約束,約束也就是綜合的目標,綜合工具會竭力滿足約束,以實作綜合的目標,約束可分為多方面,如時序方面的約束、面積方面的約束、環境屬性方面的約束、驅動和負載方面的約束等,其中最重要的約束是對時鐘等與時序相關的屬性進行約束,在綜合時,約束的各個方面可能存在一定的矛盾,如對速度和面積的約束,見圖2所示,綜合的程序就是找到一個最好的平衡點,滿足各個方面的約束,
3.1.2 綜合是基于path分析的
在整個綜合的程序中,完成是基于path進行時序分析的,因此path的概念非常重要,何謂path?如下圖5所示,
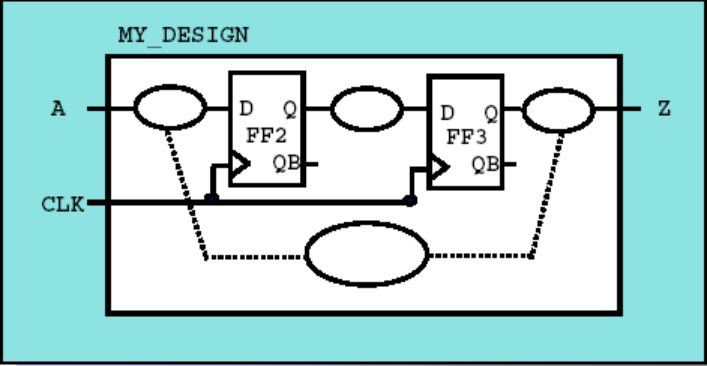
圖 5 Timing Path的概念
Path是綜合工具進行時序分析的基本單位,對于一條path而言,它的起點只能是輸入埠,或者觸發器/暫存器的時鐘端;終點只能是輸出埠,或者觸發器/暫存器的資料輸入端(對D觸發器而言,就是D端),
結合圖3而言,其中共有4條path,分別為:
1) 輸入埠A -> FF2的D端;
2) FF2的CK端-> FF3的D端;
3) FF3的CK端-> 輸出埠Z;
4) 輸入埠A -> 輸出埠Z,
同一個時鐘域多條path,組成一個組,稱為path group,與任何時鐘都沒有關系的path也組成一個組,成為default path group,結合圖3而言,有2個path group,其中path 2和path 3 屬于時鐘CK的path group,path 1和path 4屬于default path group,
在計算一條path的延時資訊時,是將這條path上所有線延時加上所有的器件單元延時,
3.2 綜合的步驟
對于Design Compiler而言,綜合的步驟如下:
1) 將需要進行綜合的設計讀入Design Compiler的記憶體中;
2) 對設計添加合適的約束;
3) 對設計進行綜合優化;
4) 分析綜合的結果是否滿足要求;
5) 如果滿足要求的話,保存綜合的結果,
綜合的主要程序也可以用圖6進行表示,
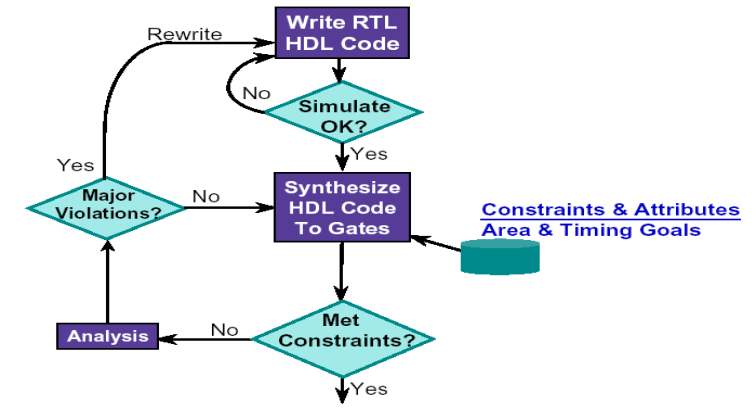
圖6 綜合的主要程序
3.3 Design Compiler簡介
3.3.1 Design Compiler介面模式
Design Compiler是Synopsys公司推出的綜合工具,在業界有較廣泛的應用,
Design Compiler有三種介面方式:圖形化介面、dc shell介面和dc shell tcl介面,
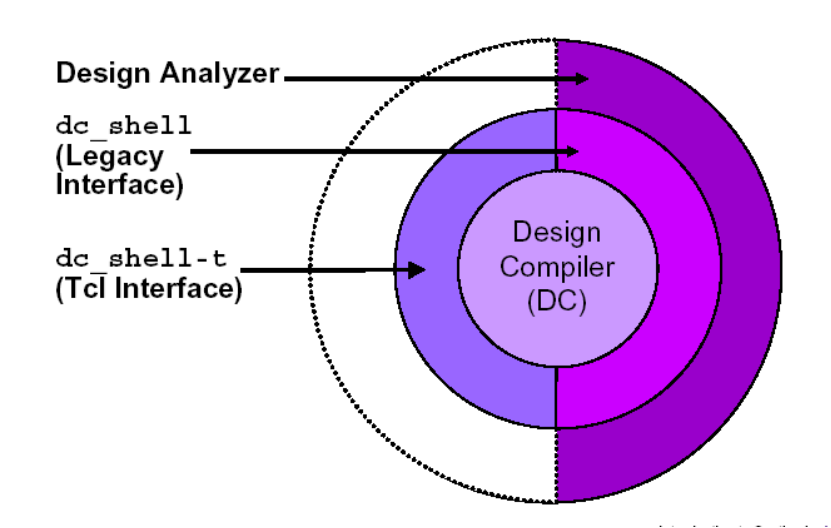
圖7 Design Compiler的介面方式
對于初學者來說,建議使用圖形化方式,便于使用,同時建議打開命令視窗,以便可以盡快熟悉Design Compiler的命令,圖形化方式需要占用較多的記憶體資源,運行速度相對命令列方式來說較慢,
3.3.2 Design Compiler啟動腳本檔案
Design Compiler啟動時需要執行一個啟動腳本檔案,該檔案名為.synopsys_dc.setup,執行該腳本檔案幫助DC鏈接指定的庫檔案,也就是綜合需要使用的廠家庫檔案,庫檔案是由廠家提供的,而不是由Synopsys公司提供,
.synopsys_dc.setup檔案可以放在下面三個目錄下:
1)$SYSNOPSYS/admin/setup
2)用戶的home目錄
3)用戶的當前作業目錄
DC啟動時搜索.synopsys_dc.setup檔案的順序為先查找用戶的當前作業目錄,然后查找用戶的home目錄,最后再查找$SYSNOPSYS/admin/setup目錄,
若在用戶的當前作業目錄下存在.synopsys_dc.setup檔案,則直接使用該檔案啟動DC,建議將.synopsys_dc.setup檔案放在用戶的當前作業目錄下,方便使用和修改,.synopsys_dc.setup檔案中需要為DC指定鏈接的庫檔案,這是通過設定target_library,link_library,symbol_library等保留字變數實作的,
target_library指定的庫檔案是DC在搭建電路時使用的庫,在DC映射的程序中,會根據電路功能選擇庫中的器件,并在時序分析時,使用庫中各器件的timing資料,link_library指定的庫中包含HDL源代碼所有單元的示例,綜合使用的線載模型和作業環境模型,symbol_library指定的庫用來將庫中的器件用圖形表示出來,下面是一個.synopsys_dc.setup檔案的例子(節選其中部分內容),
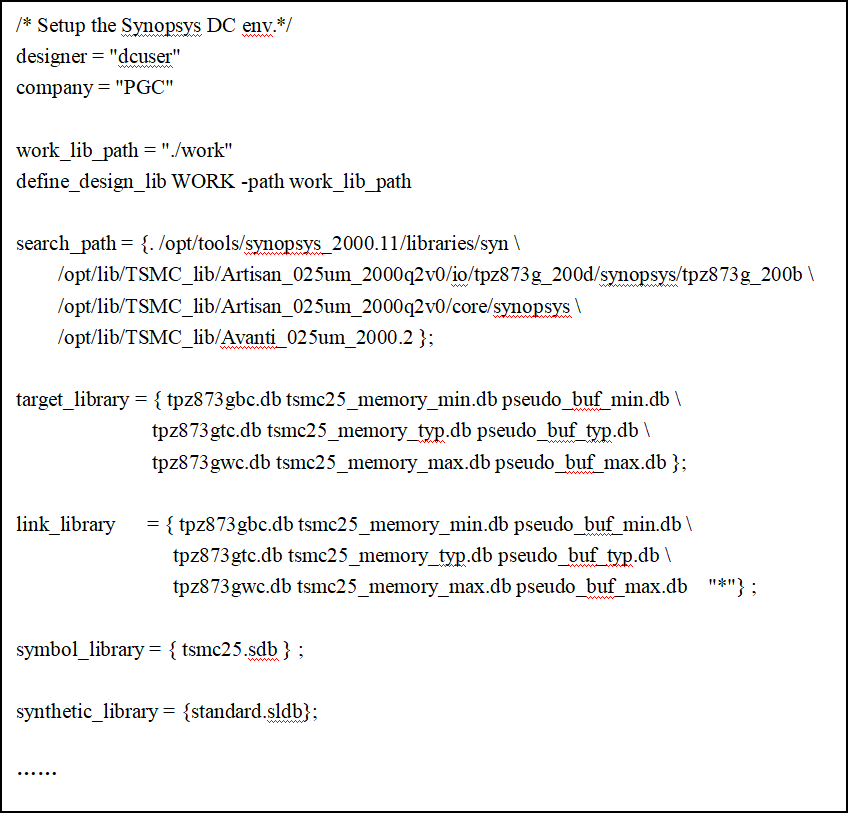
另外,為了能使用戶當前作業目錄的條理清晰,建議在DC的當前作業目錄下,劃分source、scripts、mapped和reports等子目錄,在source子目錄下存放RTL源代碼,scripts目錄下存放綜合的各種約束檔案,mapped目錄下存放綜合后的網表檔案,reports目錄下可以用來存放各種報告檔案,
3.3.3 Partition的意義
Partition是把復雜的、規模較大的設計劃分為多個規模適中的部分,以便綜合時間不要過長,比較容易得到滿足要求的綜合結果,Partition應該在撰寫RTL代碼前進行,在方案設計時就充分考慮模塊的大小、模塊間的連接等要素,只有這樣才能夠得到比較好的partition結果,綜合中,能夠對partition進行一定的調整,但效果有限,所以這里要強調,partition應該在撰寫RTL代碼前進行,綜合中進行partition的主要原則有:
1) 不要有組合邏輯穿過層次邊界;
2) 每個層次邊界,最好以暫存器做輸出;
3) 不要有膠合邏輯(glue logic)穿過層次邊界;
4) 限制每個塊(block)的大小;
5) 把輸入輸出pad、時鐘產生模塊、JTAG模塊和核心邏輯分開,
下面結合多個例子,說明partition的原則,
例1:
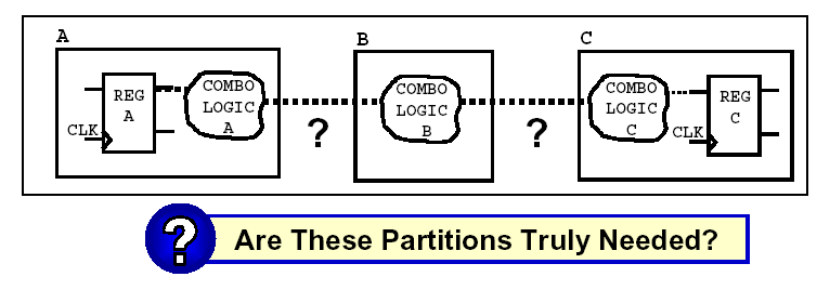
圖8 Partition的原則(例1)-a
這個例子中,模塊B是一個純組合邏輯的電路,跨接在模塊A和模塊C之間,違背了原則1,另外模塊A以組合邏輯輸出做為層次的邊界,違背了原則2,
對于例1來說,較好的partition方式如下圖所示,
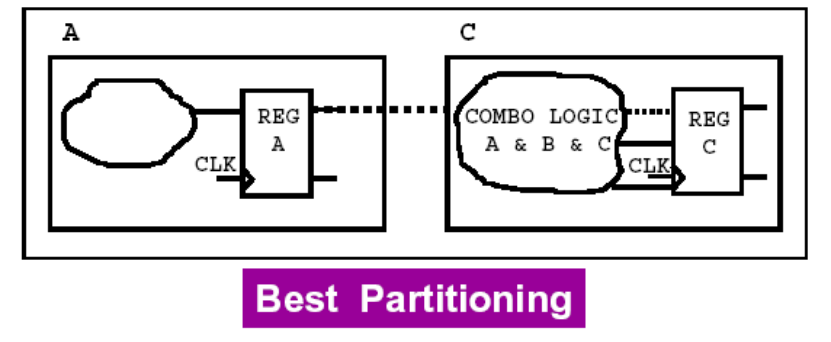
圖9 Partition的原則(例1)-b
例2:每個模塊都是以暫存器輸出,滿足原則2,所以是一個比較好的partition結果,
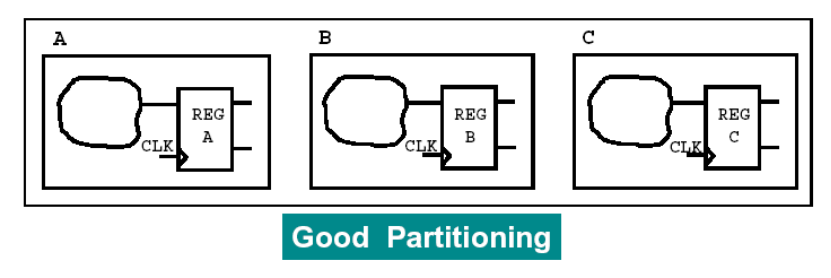
圖10 Partition的原則(例2)
例3:在這個例子中,模塊A、B、C間有一個兩輸入與非門,這個兩輸入與非門屬于膠合邏輯,穿過了模塊A、B、C的邊界,違背了原則3,
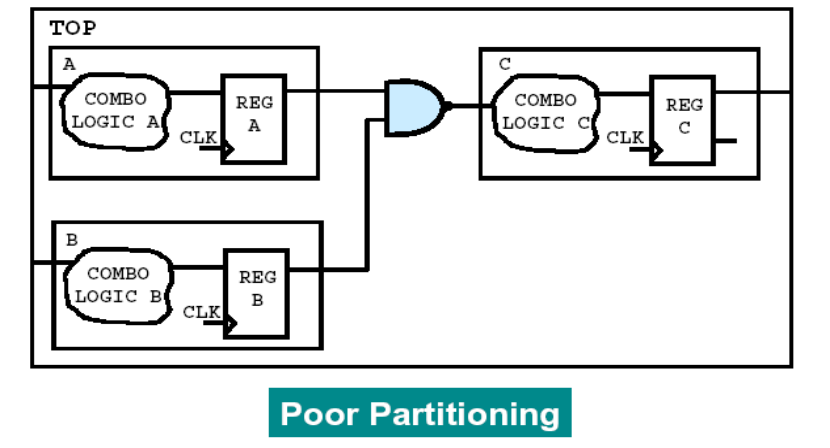
圖11 Partition的原則(例3)-a
對例3的修改方法如下圖所示,
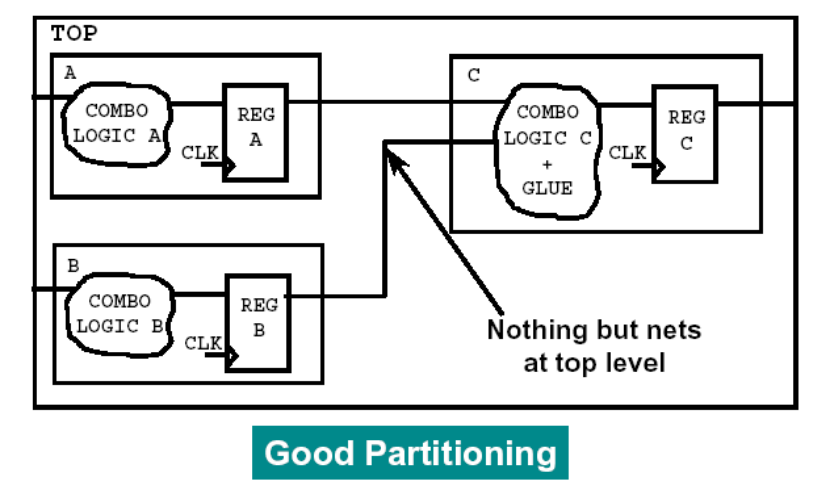
圖12 Partition的原則(例3)-b
例4:這個例子中,時鐘產生模塊、異步邏輯模塊、輸入輸出PAD、JTAG模塊與核心邏輯模塊CORE是劃分開的,滿足原則5,是個很好的partition,
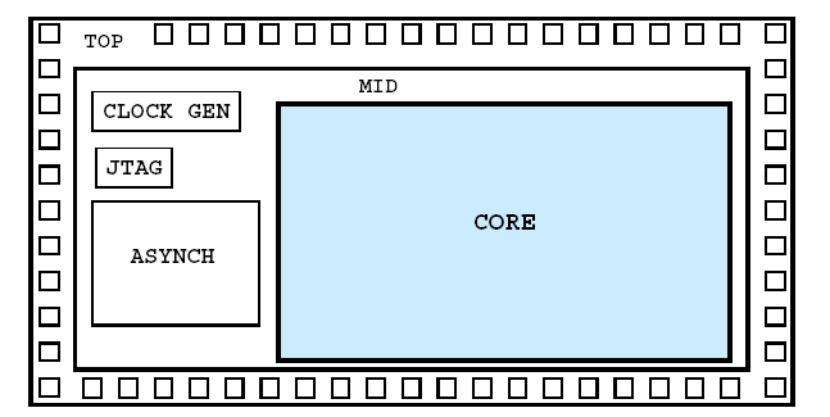
圖13 Partition的原則(例4)
3.3.4 約束檔案
學習使用DC的命令,設定約束,是本教材的核心內容,
對一個需要進行綜合的設計,如果不加任何約束就進行綜合是沒有任何意義的,只有加上了合理的約束后,綜合演算法才有目標,才能綜合出滿足需求的電路,對設計需要加上的所有約束、命令可以寫入腳本(script)檔案中,就成為約束檔案,一般情況下,約束檔案中應該包括以下內容,如下圖14所示:
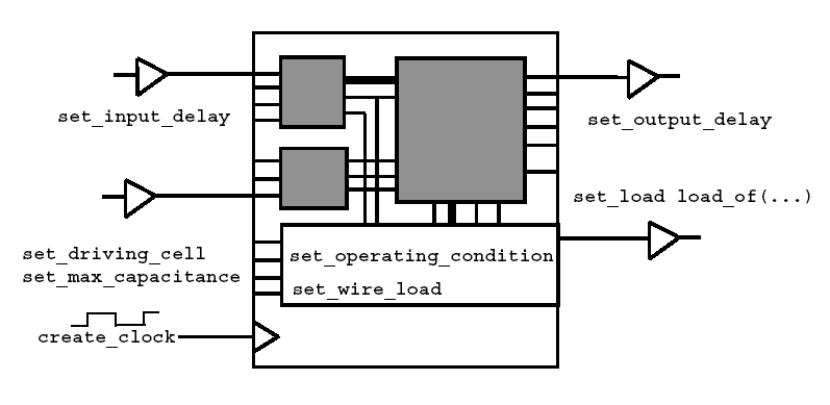
圖14 約束檔案的基本內容
其中主要有對時鐘的定義,并定義時序方面的其他約束,如設定input delay,output delay等,對于輸入信號、輸出信號,還要考慮其驅動、負載問題,這是通過設定輸入信號的driving cell,設定輸出信號的load來實作的,作業條件對芯片性能的影響也是必須考慮的因素,需要設定operating condition,隨著制造工藝的不斷提升,線延時成為延時資訊中越來越重要的部分,因此也要考慮設定線載模型,這些是主要的約束條件,在實際作業中,約束檔案中還需要其他一些約束條件,詳細情況見下面的章節,
3.3.5 綜合策略和方法
3.3.5.1 自上而下的綜合策略
自上而下綜合的步驟一般包括:
1) 把整個設計讀入DC的存盤區中;
2) 解決多次實體的問題;
3) 對最高層模塊加上合適的約束;
4) 綜合
5) 評估綜合的結果
6) 保存綜合結果
這里需要注意多次實體化的問題,
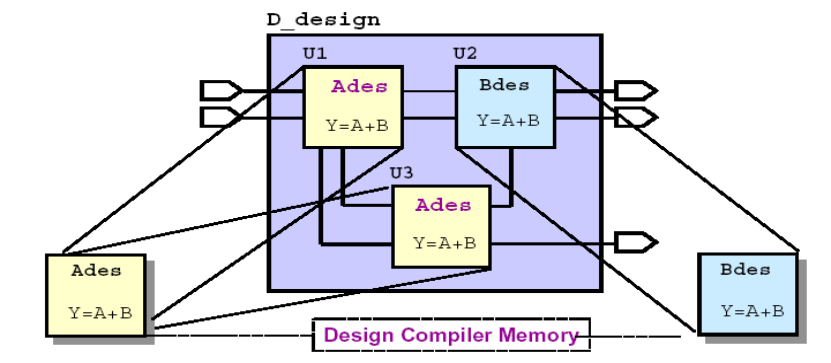
圖15 設計中出現多次實體化
圖15中,在D_design中子模塊Ades被實體化了兩次,在自上而下綜合策略中,要解決其多次實體話問題,必須通過uniquify命令,執行該命令后,子模塊Ades的每次實體化將對應唯一的一個design名,如圖16所示,U1對應的design名為Ades_0,U3對應的design名為Ades_1,這樣Ades_0和Ades_1綜合出的結果有可能存在差異,
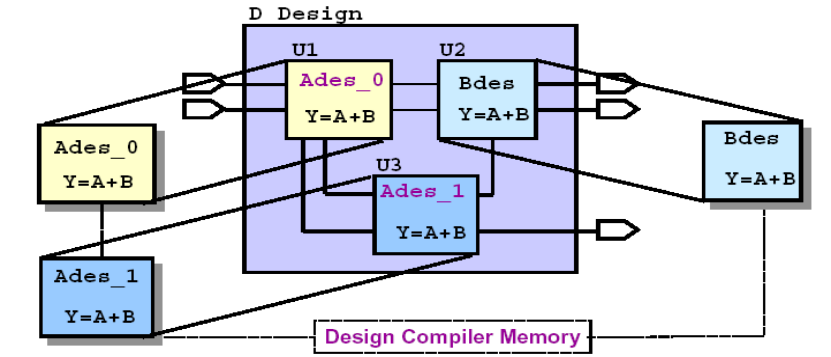
圖16 uniquify解決多次實體化問題
下面是一個自上而下綜合策略的例子(dc shell script模式),其中D_constraints.scr是約束檔案,其中包括各種約束命令,
current_design D_design
include D_constraints.scr
uniquify
compile
自上而下策略對規模不大的設計是非常適用的,而且使用起來簡單方便,不需要考慮模塊之間的關系,因此花費的人工很少,但是另一方面,由于該策略需要把整個設計讀入DC的memory,并進行綜合,對于規模比較大的設計,會占用大量的系統資源,如CPU、memory等,綜合時間也會非常長,
3.3.5.2 自下而上的綜合策略
自下而上綜合的步驟一般包括:
1) 把整個設計分成若干子塊,對每個子塊分別加約束,并進行綜合;
2) 每個子塊的綜合結果必須滿足其約束條件;
3) 對最頂層模塊加約束條件;
4) 為綜合過的每個子塊設定dont touch屬性
5) 綜合;
6) 評估綜合的結果
7) 保存綜合結果
采用自下而上策略,非常容易解決多次實體化的問題,以圖32為例,首先對Ades子模塊加約束,并進行綜合,檢查Ades子模塊的相關報告,當其滿足所有約束條件時,為其設定dont touch屬性,再對D_design模塊加約束,進行綜合即可,
下面是自下而上方式綜合圖32所示設計的script檔案(dc shell tcl模式)
read_db unmapped/A_des.db
set current_design Ades
source Aconstraints.tcl
compile
read_db unmapped/D_design.db
link
set current_design D_design
set_dont_touch [get_design Ades]
source Dconstraints.tcl
compile
用compile+dont_touch這種方式也可以解決多次實體化問題,采用這種方式,子模塊Ades只被綜合了一次,U1和U3是對同一個Ades的實體化,自下而上綜合策略通過分塊綜合的方法,可以綜合非常大的設計,對綜合的設計規模幾乎沒有限制,但這種方法需要撰寫多個約束檔案,而且各個塊之間的關系必須由工程師考慮,增加了人工,另外若各個子塊滿足各自的約束,而頂層模塊無論怎樣都不能滿足約束條件時,需要再回傳到子塊的綜合,重新規劃子塊的約束,
3.3.6 優化的引數選擇
compile程序分為三個層次:結構層、邏輯層和門級層,
結構層是最高層次的綜合、優化,主要完成選擇合適的DesignWare,運算式的公共部分共享,資源共享和運算子的重新排序,這部分同coding style關系緊密,
邏輯層完成從GTECH單元到邏輯單元的優化,門級層最終完成組合邏輯和時序邏輯的映射,
3.3.6.1 Compile –map_effort
優化的努力程度是可選的(low、medium、high),默認情況是medium,建議對一個設計進行第一次綜合時,采用默認值,選擇high時會占用較多的CPU時間,而且不能保證解決所有問題,
3.3.6.2 Compile –incremental_mapping
-incremental_mapping選項只能對已經是門級電路的設計進行,這時不會再回傳到GTECH,也就不再進行邏輯層的優化,使用這個選項時,優化的執行速度非常塊,當timing分析時,出現的violation非常少,并且slack值較小時,建議使用這個選項,
3.4 邏輯綜合整個檔案程序
config:組態檔; library:工藝庫; ----SMIC0.18工藝 mapped:map過的網表檔案; report:綜合后的報告; rtl:RTL代碼; script:tcl約束指令; unmapped:未map的網表檔案; work:DC啟動檔案等 3.5 綜合報告DC綜合報告(功耗 面積 時許報告)
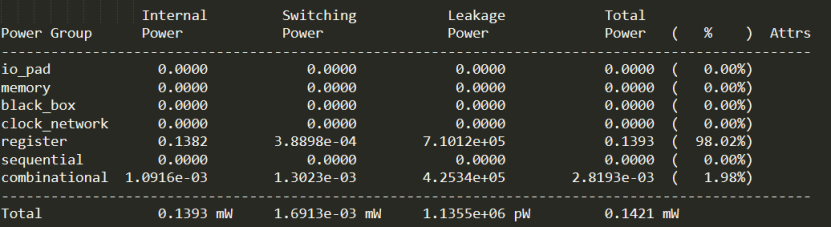
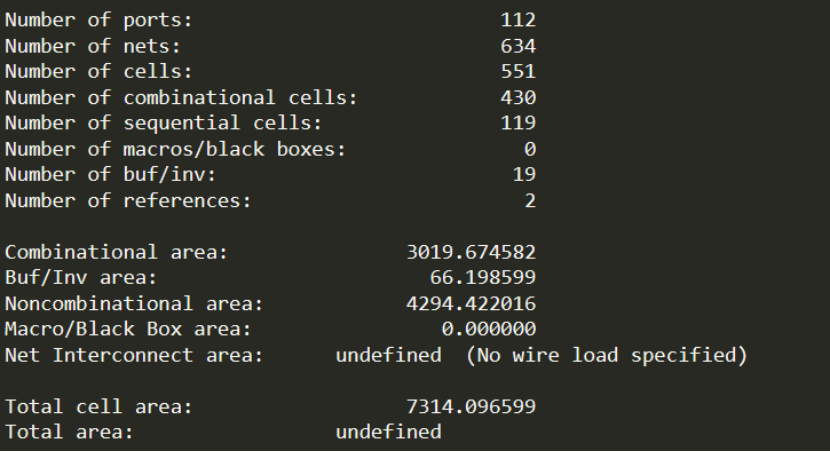
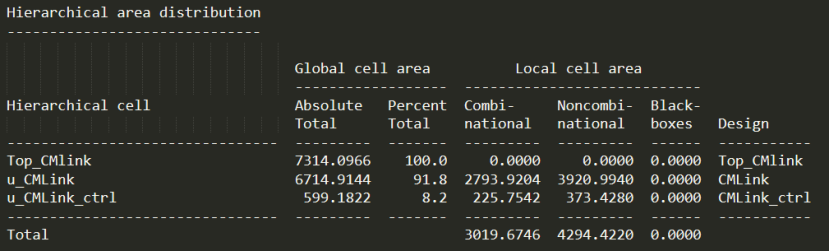
圖17 DC綜合報告
3.6 綜合后重要檔案
4、布局布線及版圖生成
4.1 布局布線準備程序及實作
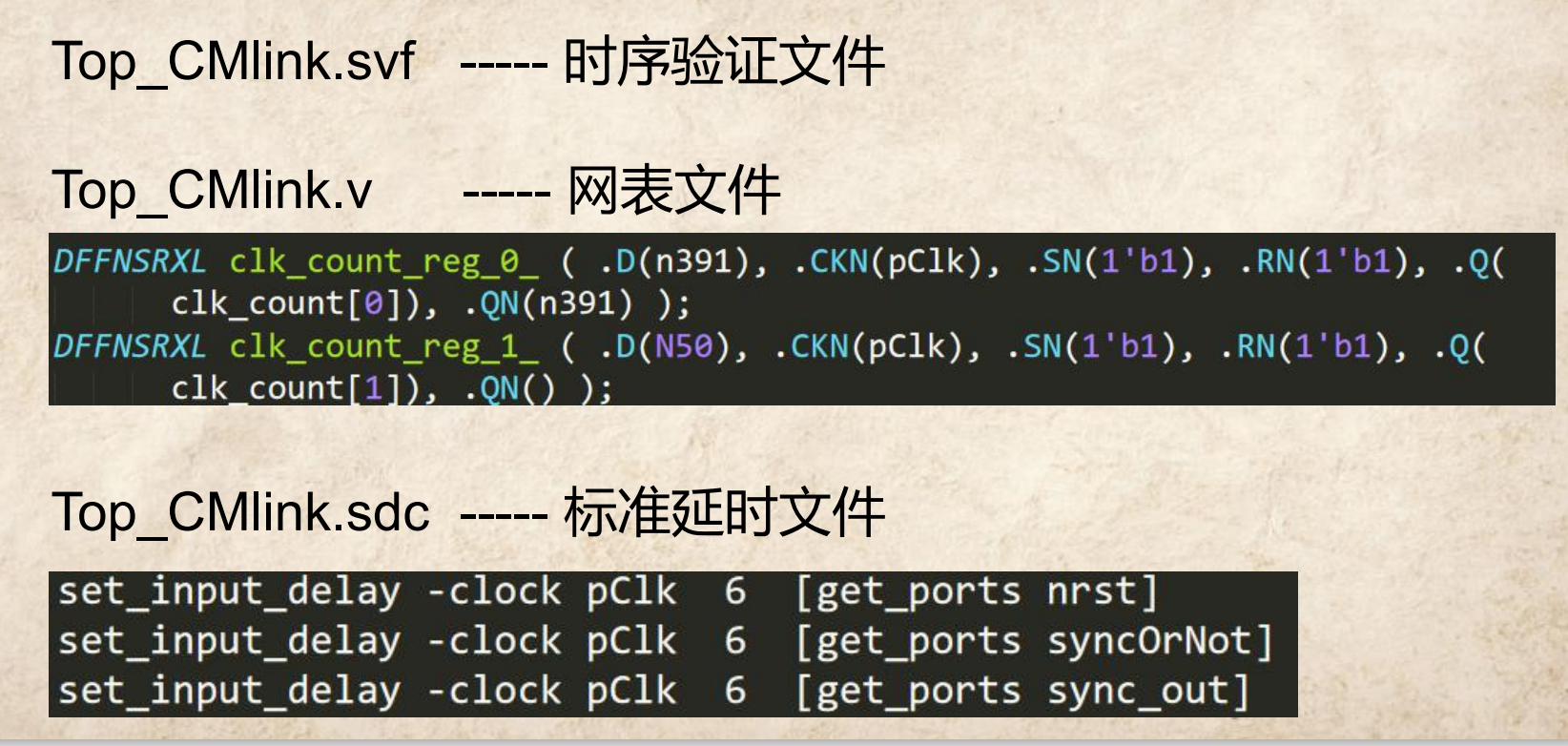
Top_CMlink.v ----- 網表檔案 Top_CMlink.sdc ----- 標準延時檔案 xxx.lib----- 時序庫 xxx.lef----- 物理庫 xxx_max.CapTbl ----- 電容表檔案 xxx_min.CapTbl xxx_typ.CapTbl ........... 布局布線及版圖實作主要是用tcl腳本 實作(有一點復雜程度),包括版圖大小、標準單元具體放置、層數、布局布線等等, 基本不會用GUI的界面, 4.2 功耗報告及版圖
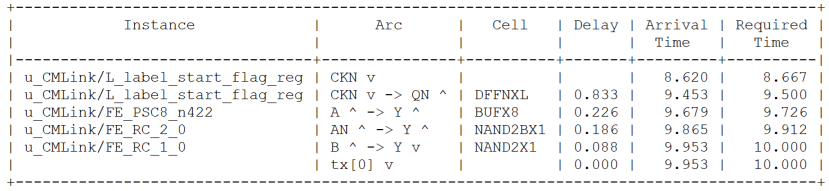
圖18 版圖設計后的功耗及時序報告
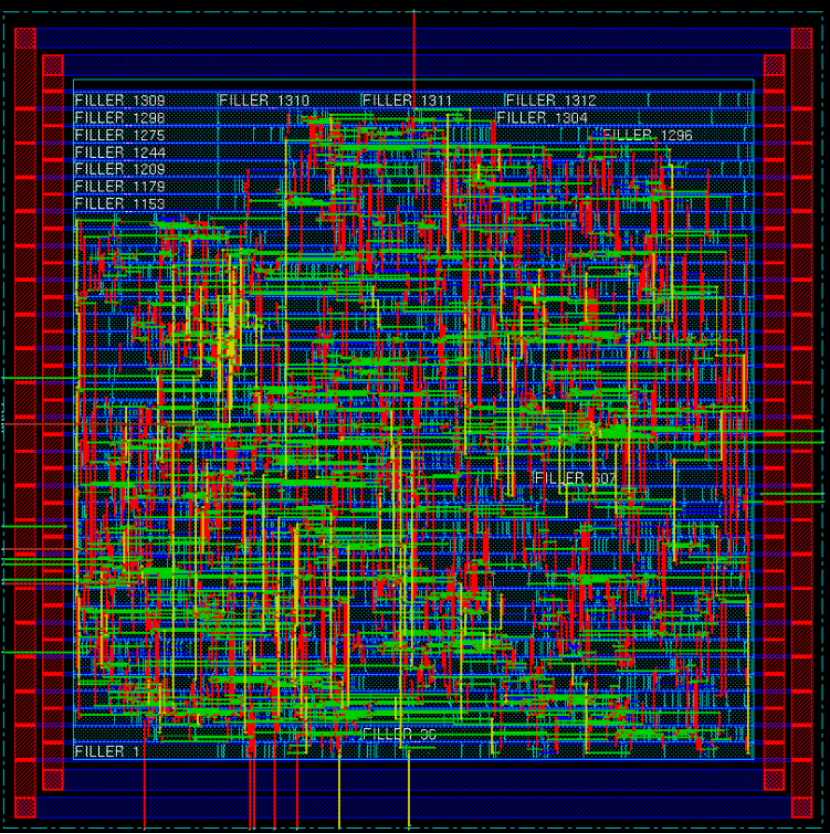
圖19 CameraLink版圖
5、后仿真
匯出.sdf 檔案反標用于 Modelsim 后仿真,SDF(Standard delay file)檔案是把布局布執行緒序中器件延時和線延時的資訊保留下來,據此就可以在路徑時序分析時將整條路徑的時序計算出來,再判斷時序約束條件就能知道是否滿足時序要求了,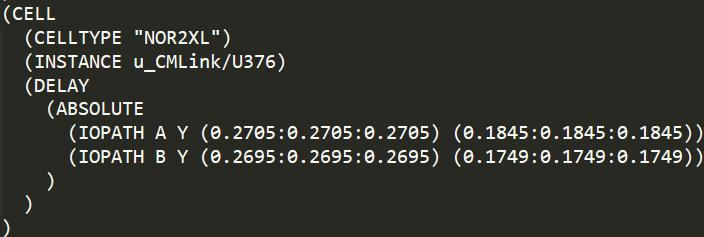 圖 20 .sdf 檔案部分內容
后仿真需要匯入網表檔案.v 及布局布線畫版圖匯出的標準延遲檔案.sdf,且同時編譯 smicxx_neg.v 工藝庫檔案,在 modelsim 仿真中對加有了延遲資訊等硬體門電路驗證,
圖 20 .sdf 檔案部分內容
后仿真需要匯入網表檔案.v 及布局布線畫版圖匯出的標準延遲檔案.sdf,且同時編譯 smicxx_neg.v 工藝庫檔案,在 modelsim 仿真中對加有了延遲資訊等硬體門電路驗證,

 圖 21 smicxx_neg.v 檔案
圖 21 smicxx_neg.v 檔案
在后仿程序中,觸發器需要滿足工藝庫中的Hold和Setup時間,并在實際電路有延遲情況等等,可以通過對波形的對照來判斷后仿真的仿真情況,但是最終是沒有影響功能,

圖 22 后仿圖示
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/256190.html
標籤:Verilog
下一篇:多型