
前幾節你應該已經了解和掌握了Thread、ThreadLocal、Volatile這幾個并發基礎知識的底層原理,這一節,你可以跟我一起深入了解下synchronized關鍵字的底層原理和其涉及的基礎知識,看完這篇成長記,你可以獲取到如下幾點:
synchronized預備知識:
- 理解什么是CAS?
- synchronized會形成幾種鎖的型別
- HotspotJVM虛擬機Java物件記憶體中的布局結構是什么,markword是鎖的關鍵欄位?
- 作業系統中用戶態和內核態的資源操作和行程是什么意思?
synchronized核心流程及原理:
- 從3個層面初步分析sychronized的核心流程和原理
好了,讓我們一起開始吧!
HelloSychronized
HelloSychronized
我們來寫一個多執行緒i++的程式,體驗一下,多執行緒如果是并發的修改一個資料,會有什么樣的執行緒并發安全問題,
剛才說過了,volatile,解決的對一個共享資料,有人寫,有人讀,多個執行緒并發讀和寫的可見性的問題,而多個執行緒對一個共享資料并發的寫,可能會導致資料出錯,產生原子性的問題,
volatile為什么不能保證原子性? 從JMM記憶體模型就可以看出來,多個執行緒同時修改一個變數,都是在自己本地記憶體中修改,volatile只是保證一個執行緒修改,另一個執行緒讀的時候,發起修改的執行緒是強制重繪資料主存,過期其他執行緒的作業記憶體的快取,沒法做到多個執行緒在本地記憶體同時寫的時候,限制只能有一個執行緒修改,因為執行緒自己修改自己記憶體的資料沒有發生競爭關系,而且之后會給各自寫入主記憶體,當然就保證不了只能有一個執行緒修改主記憶體的資料,做不到原子性了,
為了解決這個問題,可以使用syncrhonized給修改這個操作加一把鎖,一旦說某個執行緒加了一把鎖之后,就會保證,其他的執行緒沒法去讀取和修改這個變數的值了,同一時間,只有一個執行緒可以讀這個資料以及修改這個資料,別的執行緒都會卡在嘗試獲取鎖那兒,這樣也就不會出現并發同時修改,資料出錯,原子性問題了,
synchronized鎖一般有兩類,一種是對某個實體物件來加鎖,另外一種是對這個類進行加鎖,相信大家很熟悉了,這里用一個Hello synchronized的小例子,舉一個簡單物件加鎖的例子,
代碼如下:
public class HelloSynchronized {
public static void main(String[] args) {
Object o = new Object();
synchronized (o){
}
}
}
對類加鎖和對實體物件的更多例子這里就不舉例了,我們更多的是研究synchronized它的底層原理,基本的使用相信你一定可以自己學習到,
在分析sychronized原理期間,需要不斷的補充一些基礎知識,
學習sychronized先決條件(Prerequisites)
學習sychronized先決條件(Prerequisites)
- sychronized鎖的概念
在JDK 早期 sychronized 使用的時候,直接創建的重量級鎖,性能很不好,
在之后JDK新的版本中,sychronized優化了鎖,分為了4種,無鎖態、偏向鎖、自旋鎖(輕量鎖)、重量鎖,會根據情況自動升級鎖,
這四種鎖分別表示什么意思呢?
無鎖態表示第一次對剛創建的物件或者類加鎖時的狀態,我發現只有一個執行緒在操作代碼塊的資源,壓根不需要加鎖,此時會處于無鎖態,
偏向鎖,類似于貼標簽,表示這個資源暫時屬于某個執行緒,偏向它所有了,打個比方,就好比一個座位只能做一個人,你坐下后,在座位上貼上了你自己的標簽,別人發現已經有標簽了,肯定就不會在坐了,
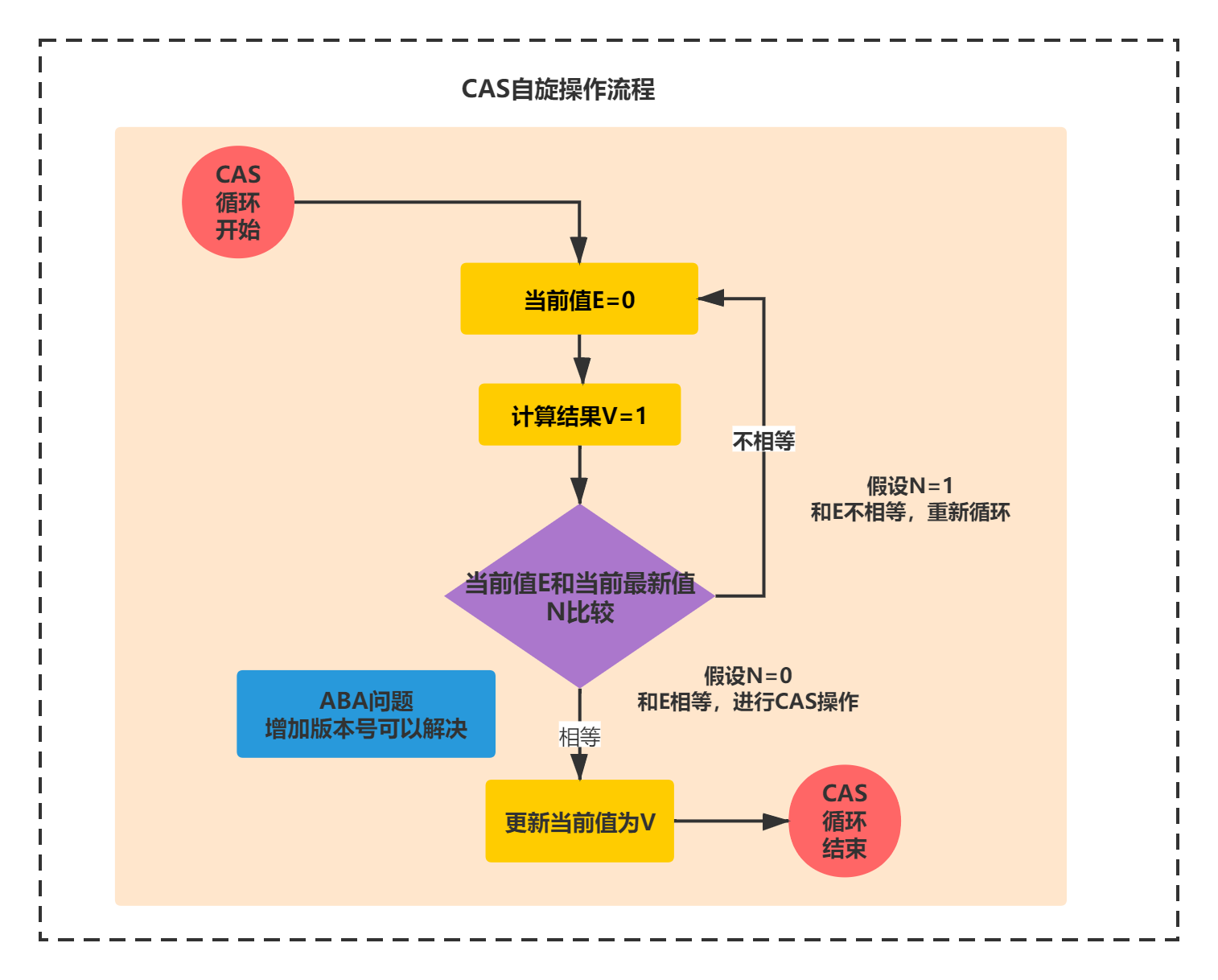
輕量鎖(自旋鎖):輕量鎖,底層是CAS自旋的操作,所以也叫自旋鎖,這里簡單普及下自旋CAS的操作流程,之后將Aotmic類的時候會仔細講下,CAS自旋流程如下:
最后我們來聊下什么是重量級鎖?這又要牽扯另一個知識了,在Linux作業系統層面,由于需要限制不同的程式之間的訪問能力, 防止他們獲取別的程式的記憶體資料, 或者獲取外圍設備的資料, 并發送到網路, CPU劃分出兩個權限等級用戶態和內核態,用于表示行程運行時所處狀態,
你可以簡單理解,一個程式啟動后會有對應的行程,它們操作的資源分為兩種,屬于用戶態的資源或者內核態的資源,
用戶態是不能直接操作內核態中資源的,只能通知內核態來操作,這個在硬體級別也有對應的指令級別(比如Intel ring0-ring3級別的指令,ring0級別一般對應的就是用戶態行程可以操作的指令,ring3對應的是內核態行程可以發起的指令),
如下圖所示:
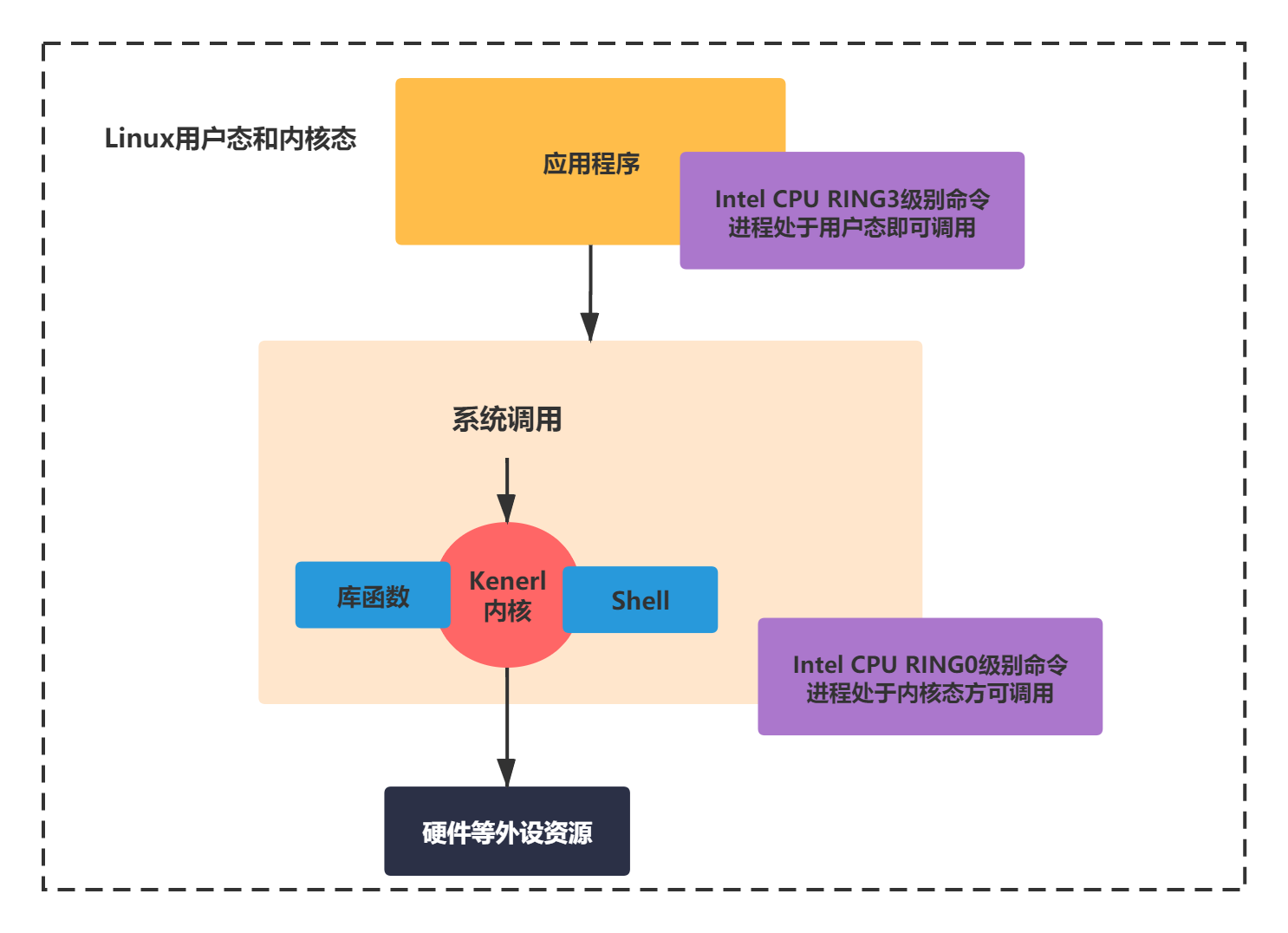
這個和synchronized有什么關系呢?因為synchronized加重量級鎖的操作,是對硬體資源的鎖指令操作,所以肯定是需要處于內核態的行程才可以操作,JVM的行程只是處于用戶態的行程,所以需要向作業系統申請,這個程序肯定會很消耗資源的,
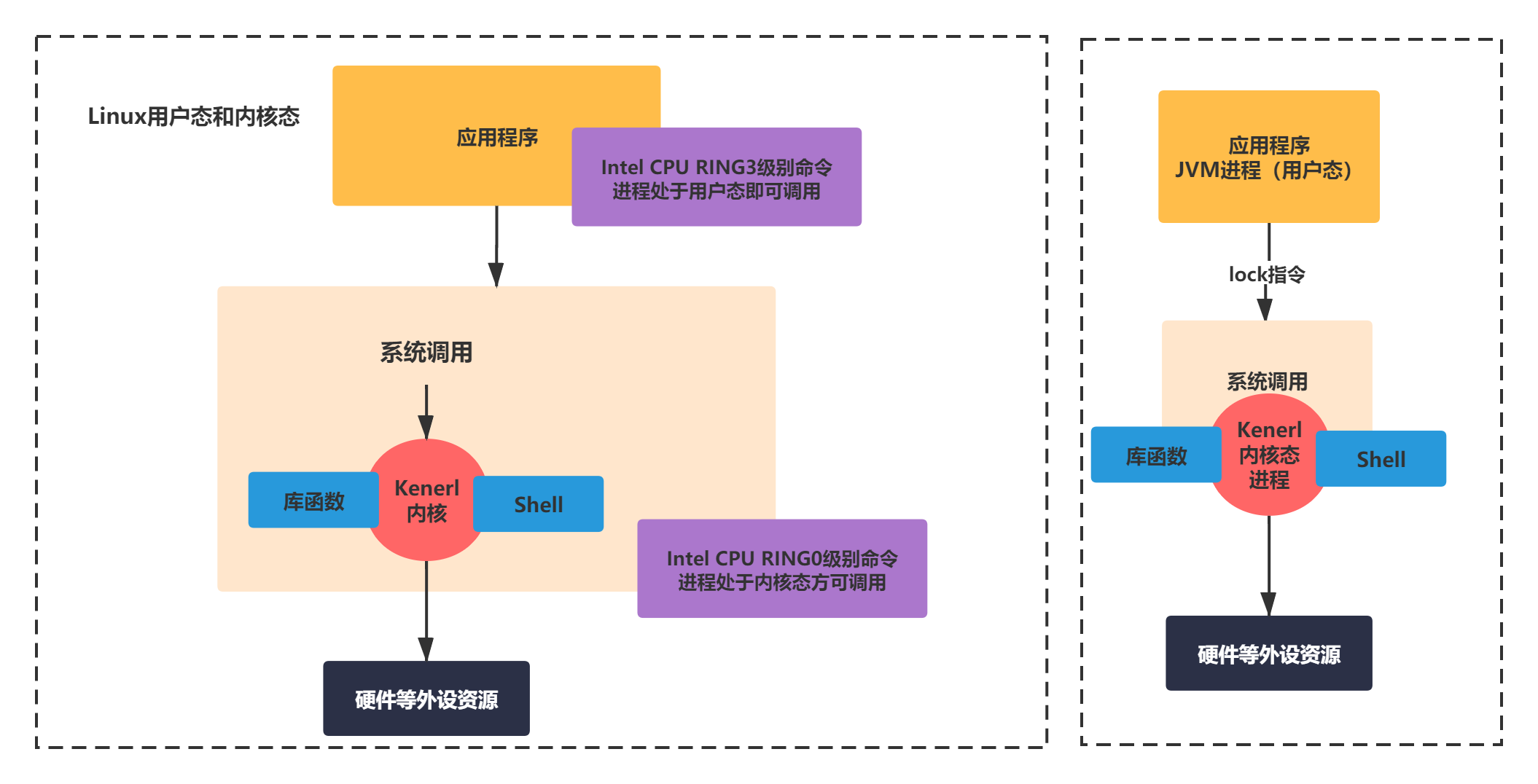
比如,synchronized的本質是JVM用戶空間的一個行程(處于用戶態)向作業系統(內核態)發起一個lock的鎖指令操作 ,
C++代碼如下:
//Adding a lock prefix to an instruction on MP machine
\#define LOCK_IF_MP(mp) "cmp $0, " #mp "; je 1f; local; 1 : "
如下圖右邊所示:
- sychronized鎖狀態的記錄
了解了sychronized的鎖的幾種型別后,怎么標識是什么樣的synchronized鎖呢?這個就要聊到Java的物件在JVM的記憶體中的結構了,不同虛擬機結構略有差別,這里講一下HotSpot虛擬機中的物件結構:
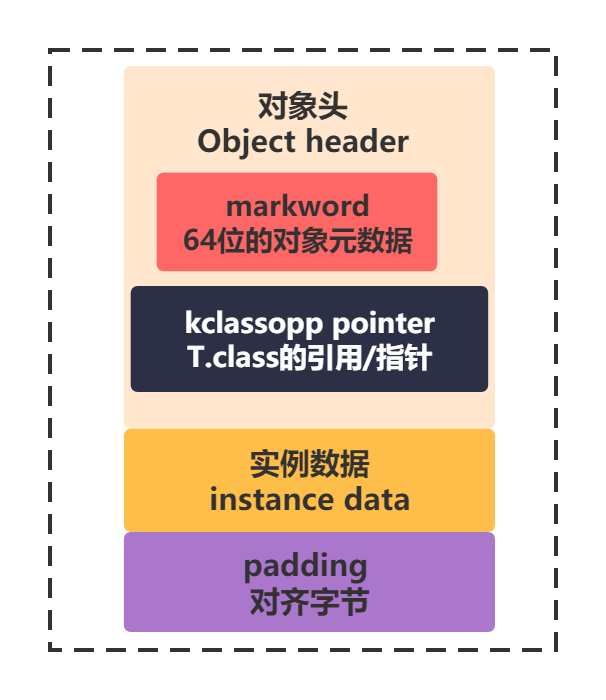
synchronized鎖狀態的資訊就記錄在markword中,markword在64位的作業系統上,8位元組,64位大小的空間的區域,
不同的鎖的標記在如下圖所示:
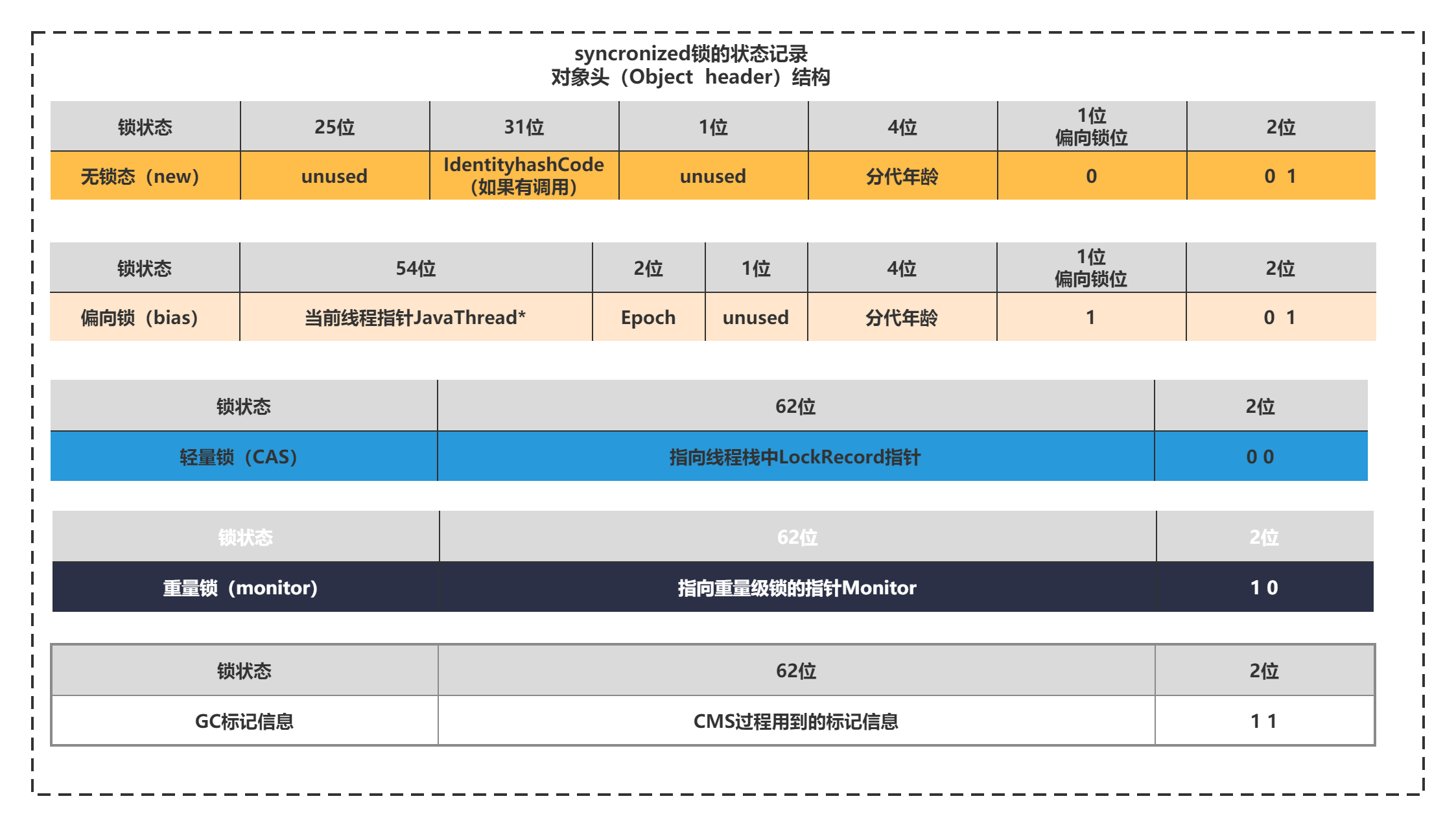
這個表你不用背下來,你只要知道,synchronized的輕量鎖和重量鎖通過2位即可以區分出來,偏向鎖和無鎖需要3位,
有了上面的基礎知識后,就可以開始研究synchronized的底層原理了,
位元組碼層面的synchronized
synchronized
sychronized在Java代碼層面就如上面Hello Synconized那個最簡單的例子所示,我們來看下它的位元組碼層面是什么樣子的?
上面main方法的位元組碼如下:
0 new #2 <java/lang/Object>
3 dup
4 invokespecial #1 <java/lang/Object.<init>>
7 astore_1
8 aload_1
9 dup
10 astore_2
11 monitorenter
12 aload_2
13 monitorexit
14 goto 22 (+8)
17 astore_3
18 aload_2
19 monitorexit
20 aload_3
21 athrow
22 return
new、dup、invokespecial、 astore_1這些指令是學習volatile的時候你應該很熟悉了,我這里需要關注的是另外 2個核心的JVM指令:monitorenter、monitorexit,
這個表示sychronized加鎖的同步代碼塊的進入和退出,為什么有兩個monitorexit呢?一個是正常退出,一個拋出例外也會退出釋放鎖,
JVM層面的synchronized
JVM層面的synchronized
那么,當 JVM的HotSpot實作中,當遇到這兩個JVM指令,又是如何執行的呢?讓我們來看一下,
在JVM HotSpot的C++代碼實際執行程序中,執行了一個InterpreterRuntime:: monitorenter方法,代碼如下:
IRT_ENTRY_NO_ASYNC(void, InterpreterRuntime::monitorenter(JavaThread* thread, BasicObjectLock* elem))
\#ifdef ASSERT
thread->last_frame().interpreter_frame_verify_monitor(elem);
\#endif
if (PrintBiasedLockingStatistics) {
Atomic::inc(BiasedLocking::slow_path_entry_count_addr());
}
Handle h_obj(thread, elem->obj());
assert(Universe::heap()->is_in_reserved_or_null(h_obj()),
"must be NULL or an object");
if (UseBiasedLocking) {
// Retry fast entry if bias is revoked to avoid unnecessary inflation
ObjectSynchronizer::fast_enter(h_obj, elem->lock(), true, CHECK);
} else {
ObjectSynchronizer::slow_enter(h_obj, elem->lock(), CHECK);
}
assert(Universe::heap()->is_in_reserved_or_null(elem->obj()),
"must be NULL or an object");
\#ifdef ASSERT
thread->last_frame().interpreter_frame_verify_monitor(elem);
\#endif
IRT_END
你可以看下上面的方法的脈絡(不懂C++也沒有關系,懂if-else就行),它的核心有兩個if,
第一個if根據變數名字PrintBiasedLockingStatistics可以判斷出應該是列印偏向鎖的統計資訊,明顯不是最重要的,
第二個if同理,UseBiasedLocking表示了是否使用了偏向鎖,如果是呼叫了ObjectSynchronizer::fast_enter否則
ObjectSynchronizer::slow_enter,
很明顯,第二個if中是synchronized加鎖的核心代碼,我們還需要繼續看下它們的脈絡,
代碼如下:synchronizer.cpp
void ObjectSynchronizer::fast_enter(Handle obj, BasicLock* lock, bool attempt_rebias, TRAPS) {
if (UseBiasedLocking) {
if (!SafepointSynchronize::is_at_safepoint()) {
BiasedLocking::Condition cond = BiasedLocking::revoke_and_rebias(obj, attempt_rebias, THREAD);
if (cond == BiasedLocking::BIAS_REVOKED_AND_REBIASED) {
return;
}
} else {
assert(!attempt_rebias, "can not rebias toward VM thread");
BiasedLocking::revoke_at_safepoint(obj);
}
assert(!obj->mark()->has_bias_pattern(), "biases should be revoked by now");
}
slow_enter (obj, lock, THREAD) ;
}
可以看到fast_enter方法,核心脈絡除了取消偏向和重新偏向的邏輯(從變數明和注釋可以看出來,這里暫時不重要,先忽略),最后核心脈絡還是呼叫了slow_enter方法,讓我們來看下:
void ObjectSynchronizer::slow_enter(Handle obj, BasicLock* lock, TRAPS) {
markOop mark = obj->mark();
assert(!mark->has_bias_pattern(), "should not see bias pattern here");
if (mark->is_neutral()) {
// Anticipate successful CAS -- the ST of the displaced mark must
// be visible <= the ST performed by the CAS.
lock->set_displaced_header(mark);
if (mark == (markOop) Atomic::cmpxchg_ptr(lock, obj()->mark_addr(), mark)) {
TEVENT (slow_enter: release stacklock) ;
return ;
}
// Fall through to inflate() ...
} else
if (mark->has_locker() && THREAD->is_lock_owned((address)mark->locker())) {
assert(lock != mark->locker(), "must not re-lock the same lock");
assert(lock != (BasicLock*)obj->mark(), "don't relock with same BasicLock");
lock->set_displaced_header(NULL);
return;
}
\#if 0
// The following optimization isn't particularly useful.
if (mark->has_monitor() && mark->monitor()->is_entered(THREAD)) {
lock->set_displaced_header (NULL) ;
return ;
}
\#endif
// The object header will never be displaced to this lock,
// so it does not matter what the value is, except that it
// must be non-zero to avoid looking like a re-entrant lock,
// and must not look locked either.
lock->set_displaced_header(markOopDesc::unused_mark());
ObjectSynchronizer::inflate(THREAD, obj())->enter(THREAD);
}
上面這一段是sychronized加鎖,核心中的核心,可以發現很多有意思的地方:
1) 從注釋可以看出,鎖會有膨脹程序,物件頭會記錄鎖的相關資訊,
2) Atomic::cmpxchg_ptr體現了ompare and exchange (CAS)操作,是輕量級鎖,
3) mark->has_locker() && THREAD->is_lock_owned((address)mark->locker()體現了synchronized是可重入鎖
4) 最后的ObjectSynchronizer::inflate意思為膨脹為重量級鎖,
C++的代碼有很多細節和知識,你開始學習的時候不要想著全部搞清楚,一定要有之前學到的思想,先脈絡后細節,搞清楚脈絡再說研究細節的部分,
所以,通過初步看過synchronized的HotSpot C++代碼實作,重點的脈絡就是鎖升級的程序和原理,接下來重點分析一下這個程序,
synchronized鎖升級的程序
synchronized鎖升級的程序
前面通過從位元組碼層面到JVM層面初步了解了synchronized的實作,結合之前說的sychronized的鎖的幾種型別,最終可以分析出來synchronized鎖會有一個升級的程序,程序如下圖所示:
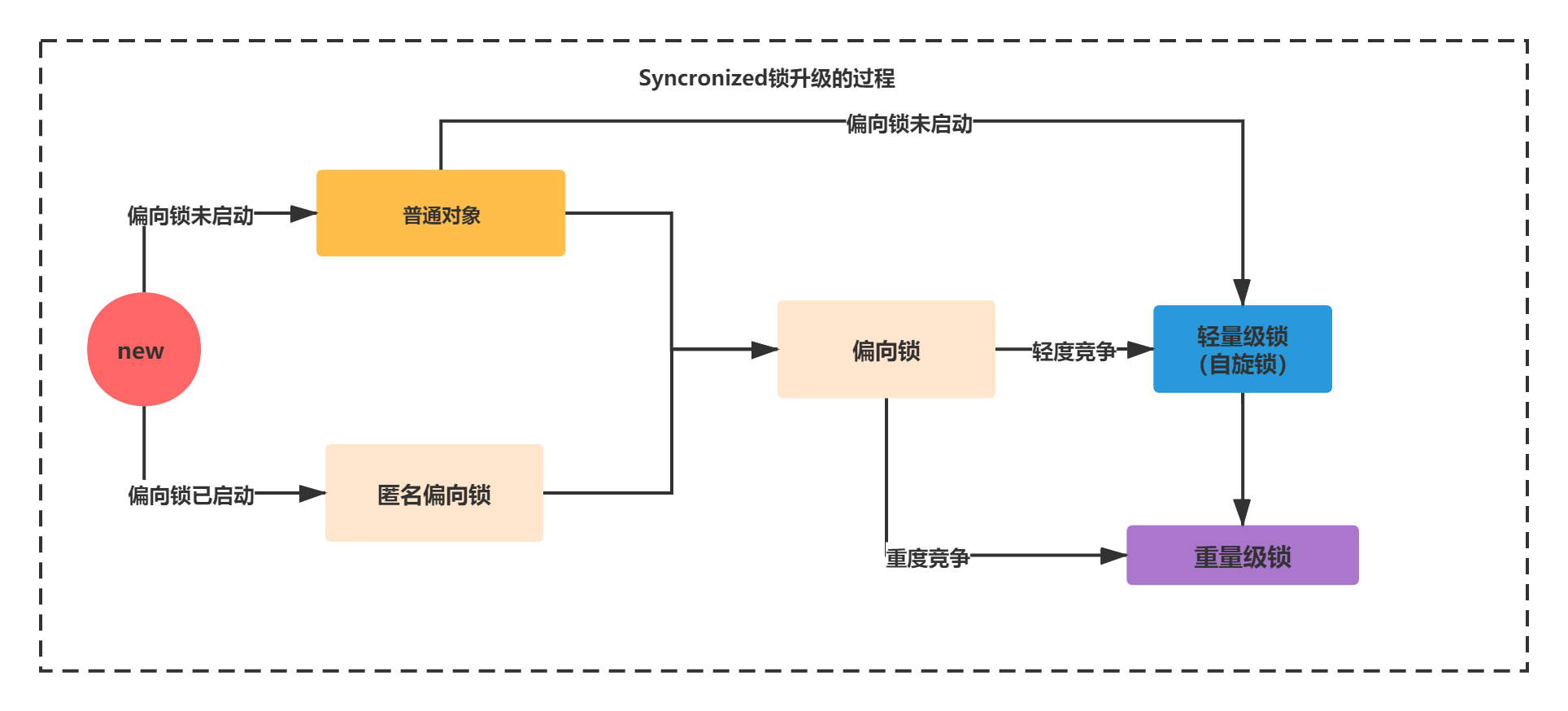
這個圖非常重要,大家一定要牢記住,下一節會花費整整一節來講在這個圖,
本文由博客群發一文多發等運營工具平臺 OpenWrite 發布
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/331955.html
標籤:Java