參考的一些文章以及論文我都會給大家分享出來 —— 鏈接就貼在原文,論文我上傳到資源中去,大家可以免費下載學習,如果當天資源區找不到論文,那就等等,可能正在審核,審核完后就可以下載了,大家一起學習,一起進步!加油!!
目錄
1. 影像平滑概述
2. 均值濾波
(1)基本概念
(2)代碼實作
圖片添加噪聲
?進行均值濾波
3. 方框濾波
(1)基本概念
(2)代碼實作
4. 高斯濾波
(1)基本概念
(2)代碼實作
5. 中值濾波
(1)基本概念
(2)代碼實作
6.結束語
7.參考論文
1. 影像平滑概述
此處參考論文:《幾種影像平滑處理方法比較研究_關雪梅》
在處理和傳輸數字影像的程序中可能會受到不同的噪聲的干擾,影像噪聲會引起影像質量降低、影像變得模糊,使影像的特征被淹沒、而通過除去噪聲來達到影像增強的目的的操作被稱為影像平滑處理;
一般來說,污染影像的噪聲的來源主要有以下三種方式:
(1)第一種是在光電、電磁轉換程序中產生的人為噪聲
(2)第二種是大氣層電(磁)暴、閃 電、電壓、浪涌等引起的強脈沖性沖激噪聲
(3)第三種是自然起伏性噪聲,由物理量的不連續性或粒子性所引起
2. 均值濾波
(1)基本概念
假設被噪聲污染的數字影像空間含有 N*N 個像素點,而這幅數字影像中每一個像素點值可以通過領域內(可以理解為使用矩形括起來)幾個像素點的平均值計算出來,采用平滑影像處理方法就可以得到一幅新的影像,這個程序就被稱為均值濾波
如果對于這種二維中的影像的平滑處理理解有點難度的話,可以參考我之前的一篇關于語音信號經過滑動平均濾除噪聲的文章,應該理解起來輕松一點:M-point moving-average(M點滑動平均)Matlab 實作
(2)代碼實作
圖片添加噪聲
首先肯定就是讀取影像資訊了:
"""
Author:XiaoMa
date:2021/10/28
"""
import cv2
import numpy as np
#讀取影像資訊
img0 = cv2.imread("E:\From Zhihu\For the desk\cvnine0.jpg")
img1 = cv2.cvtColor(img0, cv2.COLOR_BGR2GRAY)
h, w = img0.shape[:2]
print(h, w)
cv2.namedWindow("W0")
cv2.imshow("W0", img0)
cv2.waitKey(delay = 0)得到的影像資訊如下:450 720
 然后在原圖中加入噪聲:
然后在原圖中加入噪聲:
使用 skimage.util.random_noise(image, mode=‘gaussian’, seed=None, clip=True, **kwargs)
image: 添加噪聲的影像
mode: 添加的噪聲型別(‘gaussian’ 高斯加性噪聲
‘localvar’ 高斯加性噪聲,每點具有特定的區域方差
‘poisson’ 泊松分布的噪聲
'salt’鹽噪聲,隨機用1替換像素,屬于高灰度噪聲
‘pepper’ 胡椒噪聲,隨機用0或-1替換像素,屬于低灰度噪聲
‘s&p’椒鹽噪聲,兩種噪聲同時出現,呈現出黑白雜點)
在這篇文章中我們就加入簡單的高斯白噪聲即可:
#給影像增加隨機噪聲
img2 = skimage.util.random_noise(img0, mode='gaussian')
cv2.namedWindow("W1")
cv2.imshow("W1", img2)
cv2.waitKey(delay = 0) 進行均值濾波
進行均值濾波
使用 cv2.blur() 函式
其中主要有兩個引數,需要處理的影像和操作的核
#進行均值濾波
img3 = cv2.blur(img2, (6, 5))
cv2.namedWindow("W2")
cv2.imshow("W2", img3)
cv2.waitKey(delay = 0)
可以看出來濾波后的影像對于加了噪聲的影像來說確實好了一點,但沒辦法達到原圖那樣的效果;按照我個人的理解,加入噪聲就是使得一些像素點的像素值發生了改變,所以整個影像中的像素總值也發生了改變,即便求平均也會對原圖產生影響,而且還把那些之前沒有被改變的像素點也給影響了
3. 方框濾波
(1)基本概念
前面提到的均值濾波是對整個領域內的像素點求平均,再將平均值賦給目標像素點,但是方框濾波可以選擇是否對像素值進行歸一化,即可以將得到的像素點的總值賦給一個像素點
(2)代碼實作
使用 cv2.boxFilter(src,ddepth,ksize,normalize)
src: 原圖
ddepth: 目標影像深度
ksize: 核大小(和均值濾波類似)
normalize: 是否進行歸一化,使用布林值進行選擇
若我們進行歸一化處理,效果就會和均值濾波一樣,所以在這里我們只演示不進行歸一化操作:
#進行方框濾波
img4 = cv2.boxFilter(img2, ddepth = -1, ksize = (2, 2), normalize = False)
cv2.namedWindow("W3")
cv2.imshow("W3", img4)
cv2.waitKey(delay = 0)在這里我們將核的大小設定為(2, 2),得出結果: 設定為(3, 3):
設定為(3, 3): 再次擴大為(5, 5):
再次擴大為(5, 5):

整個影像變白了,這是為什么呢?
我們知道不進行歸一化就是將方框內的所有像素點值賦給一個像素點,而它的值是有最大值255的,如果超過這個值像素點就溢位了,變成了白色;前面我們將核值設為(x, y),那么就有 x*y個像素點的值賦給一個像素點,超過某個界限肯定會導致所有的點都溢位了,整個影像自然也就變白了
4. 高斯濾波
(1)基本概念
均值濾波中我們是將方框中的每一個像素點的值都加起來求平均然后賦給原來的像素點,這樣每一個像素點的權值都是1,但是在高斯濾波中,每一個像素點的權值以和該像素點的距離成高斯分布;即距離越遠的像素點的權值越小
(2)代碼實作
#進行高斯濾波
img5 = cv2.GaussianBlur(img2, (5, 5), 0) #引數分別為:原圖、濾波器大小、標準差(標準差設定為0則會自動按照大小進行選擇)
cv2.namedWindow("W4")
cv2.imshow("W4", img5)
cv2.waitKey(delay = 0)
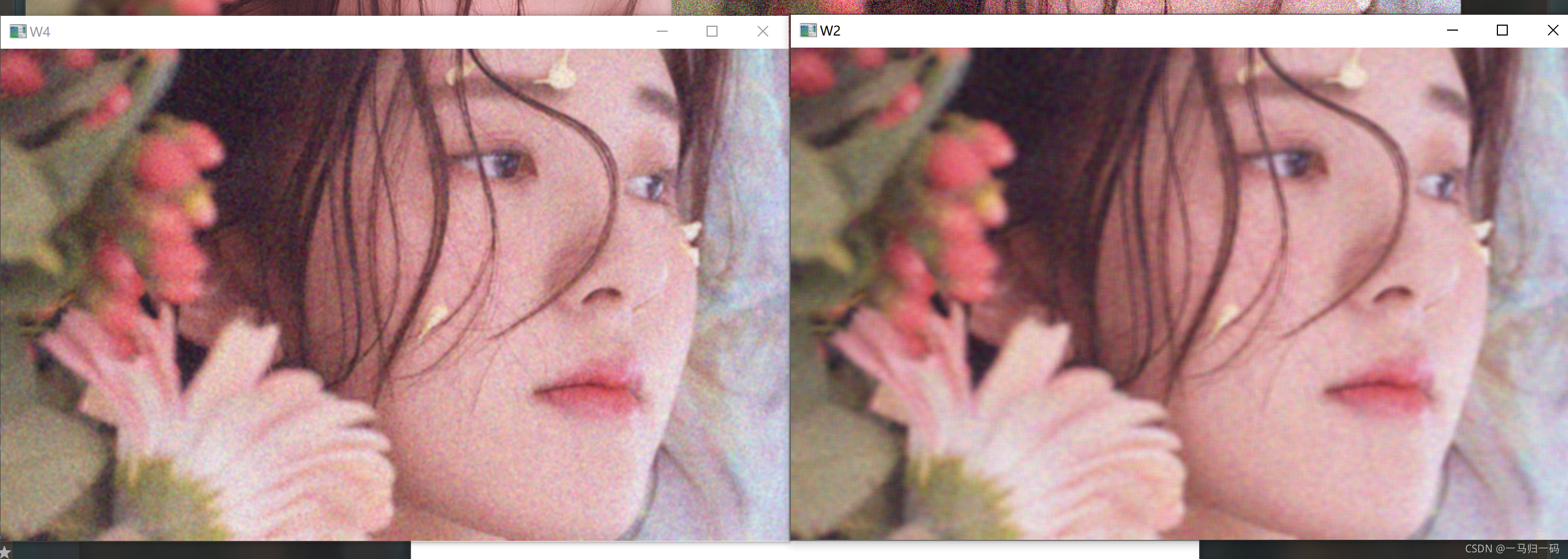 上圖中 W4 是高斯濾波的結果,W2 是均值濾波的結果(反正我本人看不出區別,哈哈哈哈)
上圖中 W4 是高斯濾波的結果,W2 是均值濾波的結果(反正我本人看不出區別,哈哈哈哈)
5. 中值濾波
(1)基本概念
(2)代碼實作
使用函式 cv2.medianblur()
此處參考:opencv學習(二十一)之中值濾波medianBlur
一般引數有:
輸入影像:可規定影像深度,與濾波器大小有關
濾波器尺寸大小:必須為奇數
當濾波器大小為 3、5時,輸入影像的深度為 CV_8U、CV_16U、CV_32F中的一個,當濾波器尺寸過大時,輸入影像的深度只能是 CV_8U
CV_8U - 8-bit unsigned integers ( 0..255 )
CV_8S - 8-bit signed integers ( -128..127 )
CV_16U - 16-bit unsigned integers ( 0..65535 )
CV_16S - 16-bit signed integers ( -32768..32767 )
CV_32S - 32-bit signed integers ( -2147483648..2147483647 )
CV_32F - 32-bit floating-point numbers ( -FLT_MAX..FLT_MAX, INF, NAN )
CV_64F - 64-bit floating-point numbers ( -DBL_MAX..DBL_MAX, INF, NAN )
#進行中值濾波
img6 = cv2.imread("E:\From Zhihu\For the desk\cvnine0_0.png") #讀取的是添加了噪聲的影像
img7 = cv2.medianBlur(np.uint8(img6), 9)
cv2.namedWindow("W5")
cv2.imshow("W5", img7)
cv2.waitKey(delay = 0)

個人認為并不見得效果有多好,通過調整濾波器尺寸可以進行多次嘗試,來達到最優的一個影像平滑效果
6.結束語
這篇文章主要介紹了影像平滑中常用到的幾種濾波方法,比如均值濾波、方框濾波、高斯濾波以及中值濾波,影像平滑的主要目的是減小影像中的一些噪聲,對影像進行優化處理;當然影像平滑的代價就是失去一些影像中的細節變化,如果大家學過《信號與系統》就會知道,影像變換域中決定細節部分的是高頻部分,所以通過影像平滑,影像肯定丟失了高頻部分,這表明我們在本篇文章中構建的這幾個濾波器本質上都屬于低通濾波器,肯定會使影像變得模糊的,至于去噪和保留細節這兩個對立的面的平衡自己通過調整引數進行尋找即可,在本篇文章中參考的文章鏈接我都粘貼上去了,論文既上傳到資源部分也粘貼到了下面,需要的直接查看就可以了,加油!
7.參考論文
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/341894.html
標籤:python