《機器人SLAM導航核心技術與實戰》第1季:第2章_C++編程范式
視頻講解- 【第1季】2.第2章_C++編程范式-視頻講解
- 【第1季】2.1.第2章_C++編程范式-C++工程的組織結構-視頻講解
- 【第1季】2.2.第2章_C++編程范式-C++代碼的編譯方法-視頻講解
- 【第1季】2.3.第2章_C++編程范式-C++編程風格指南-視頻講解
- 先 導 課
- 第 1 季 : 快 速 梳 理 知 識 要 點 與 學 習 方 法
- 第 2 季 : 詳 細 推 導 數 學 公 式 與 代 碼 解 析
- 第 3 季 : 代 碼 實 操 以 及 真 實 機 器 人 調 試
- 答 疑 課
 ?
?
 ?
C++、ROS 和 SLAM 是什么關系?
?
C++、ROS 和 SLAM 是什么關系?
 ?
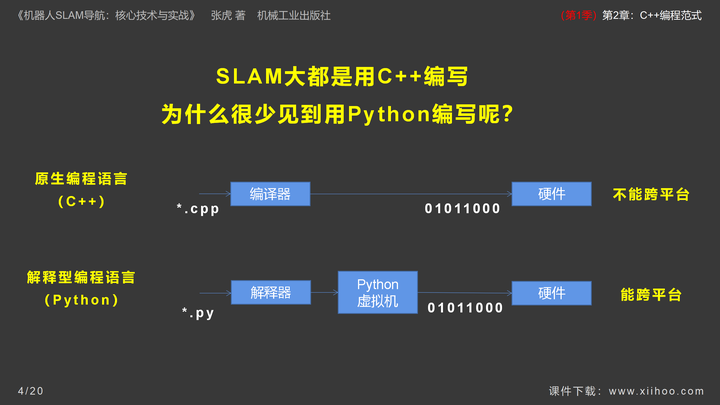
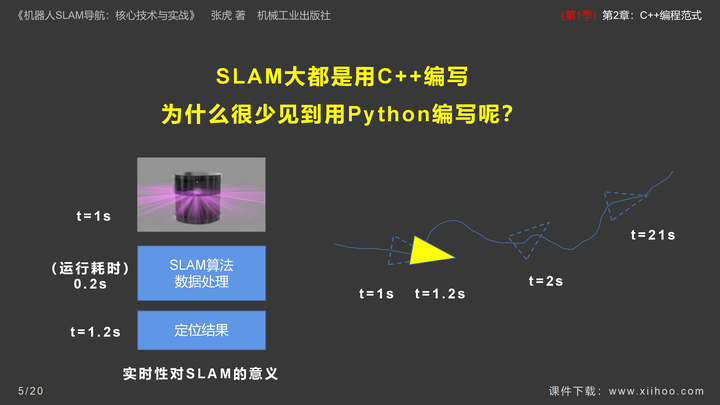
SLAM大都是用C++撰寫,為什么很少見到用Python撰寫呢?
實時性方面,C++要優于Python,
Python是對程式員友好的編程語言,
C++是對計算機友好的編程語言,
?
SLAM大都是用C++撰寫,為什么很少見到用Python撰寫呢?
實時性方面,C++要優于Python,
Python是對程式員友好的編程語言,
C++是對計算機友好的編程語言,
 ?
?
 ?
?
 ?
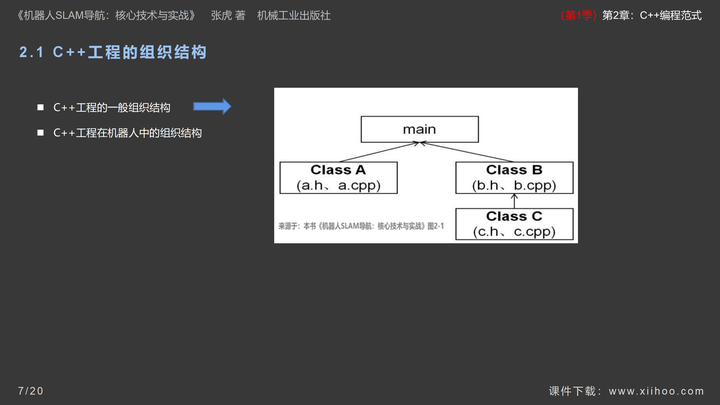
2.1 C++工程的組織結構
C++工程的一般組織結構
C++工程在機器人中的組織結構
?
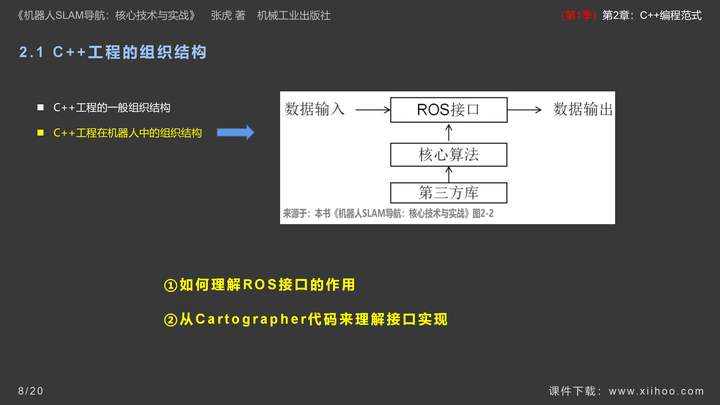
2.1 C++工程的組織結構
C++工程的一般組織結構
C++工程在機器人中的組織結構
 ?
①如何理解ROS介面的作用
②從Cartographer代碼來理解介面實作
?
①如何理解ROS介面的作用
②從Cartographer代碼來理解介面實作
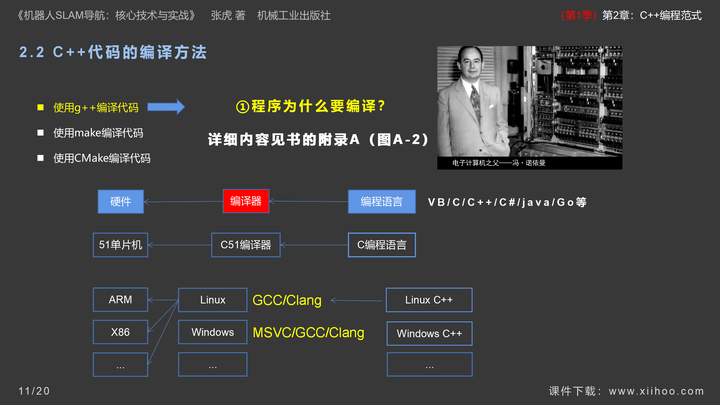
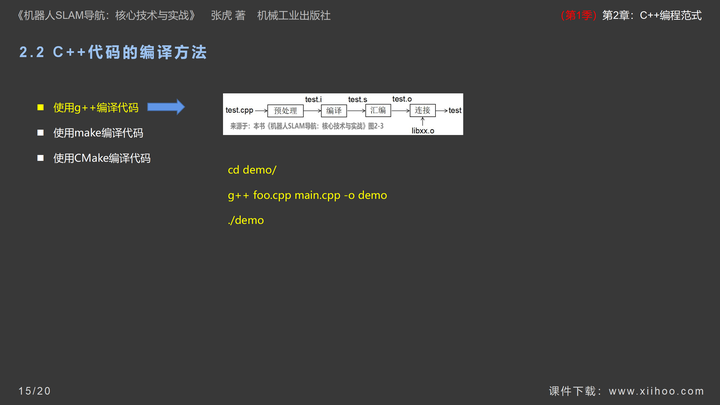
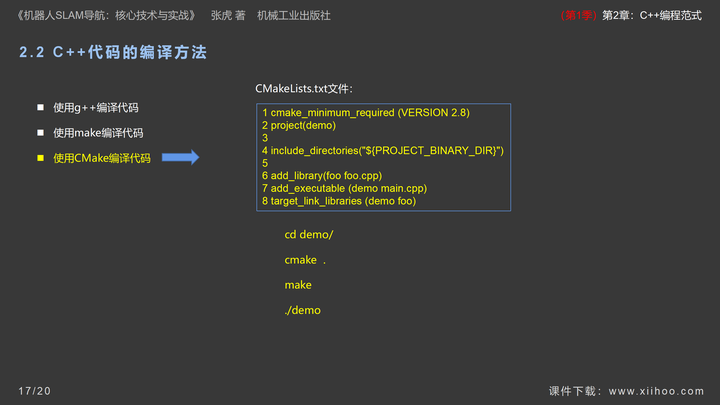
 2.2 C++代碼的編譯方法
使用g++編譯代碼
使用make編譯代碼
使用CMake編譯代碼
2.2 C++代碼的編譯方法
使用g++編譯代碼
使用make編譯代碼
使用CMake編譯代碼
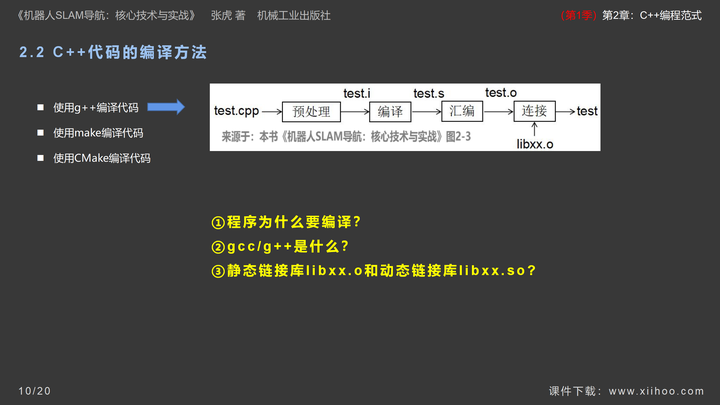 ?
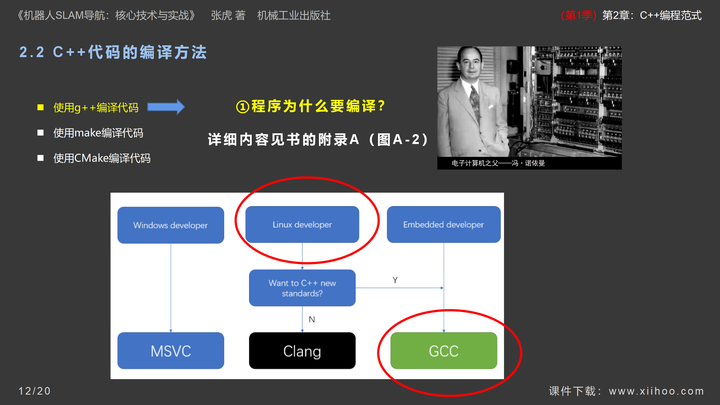
①程式為什么要編譯?
MSVC/GCC/Clang
?
①程式為什么要編譯?
MSVC/GCC/Clang
 ?
?
 ?
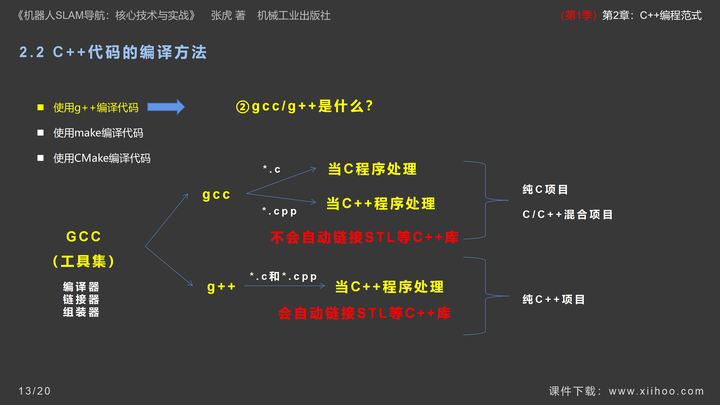
②gcc/g++是什么?
?
②gcc/g++是什么?
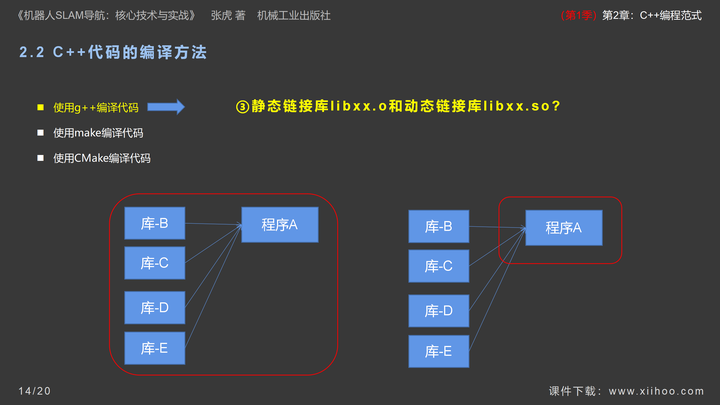
 ③靜態鏈接庫libxx.o和元件libxx.so?
③靜態鏈接庫libxx.o和元件libxx.so?
 ?
?
 ?
?
 ?
?
 2.3 C++編程風格指南
頭檔案規范
作用域規范
類規范
命名約定
①規避低級錯誤
②提高團隊開發效率
③便于維護升級
2.3 C++編程風格指南
頭檔案規范
作用域規范
類規范
命名約定
①規避低級錯誤
②提高團隊開發效率
③便于維護升級
 ?
例程原始碼下載
?
例程原始碼下載
- Github下載: github.com/xiihoo/Books_Robot_SLAM_Navigation
- Gitee下載(國內訪問速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
- PPT課件下載:
- PDF課件下載:
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/502916.html
標籤:其他
上一篇:作業系統的介紹
下一篇:第5章 回圈和運算式