??本文介紹基于Python語言中gdal模塊,對遙感影像資料進行柵格讀取與計算,同時基于QA波段對像元加以篩選、掩膜的操作,
??本文所要實作的需求具體為:現有自行計算的全球葉面積指數(LAI).tif格式柵格產品(下稱“自有產品”),為了驗證其精確度,需要與已有學者提出的成熟產品——GLASS全球LAI.hdf格式柵格產品(下稱“GLASS產品”)進行做差對比;其中,自有產品除了LAI波段外,還有一個質量評估波段(QA),即自有產品在后期使用時,還需結合QA波段進行篩選、掩膜等處理,其中,二者均為基于MODIS hv分幅的產品,
??本文分為兩部分,第一部分為代碼的詳細分段講解,第二部分為完整代碼,
1 代碼分段講解
1.1 模塊與路徑準備
??首先,需要對用到的模塊與存放柵格影像的各類路徑加以準備,
import os
import copy
import numpy as np
import pylab as plt
from osgeo import gdal
# rt_file_path="G:/Postgraduate/LAI_Glass_RTlab/Rc_Lai_A2018161_h12v03.tif"
# gl_file_path="G:/Postgraduate/LAI_Glass_RTlab/GLASS01E01.V50.A2018161.h12v03.2020323.hdf"
# out_file_path="G:/Postgraduate/LAI_Glass_RTlab/test.tif"
rt_file_path="I:/LAI_RTLab/A2018161/"
gl_file_path="I:/LAI_Glass/2018161/"
out_file_path="I:/LAI_Dif/"
??其中,rt_file_path為自有產品的存放路徑,gl_file_path為GLASS產品的存放路徑,out_file_path為最終二者柵格做完差值處理后結果的存放路徑,
1.2 柵格影像檔案名讀取與配對
??接下來,需要將全部待處理的柵格影像用os.listdir()進行獲取,并用for回圈進行回圈批量處理操作的準備,
rt_file_list=os.listdir(rt_file_path)
for rt_file in rt_file_list:
file_name_split=rt_file.split("_")
rt_hv=file_name_split[3][:-4]
gl_file_list=os.listdir(gl_file_path)
for gl_file in gl_file_list:
if rt_hv in gl_file:
rt_file_tif_path=rt_file_path+rt_file
gl_file_tif_path=gl_file_path+gl_file
??其中,由于本文需求是對兩種產品做差,因此首先需要結合二者的hv分幅編號,將同一分幅編號的兩景遙感影像放在一起;因此,依據自有產品檔案名的特征,選擇.split()進行字串分割,并隨后截取獲得遙感影像的hv分幅編號,
1.3 輸出檔案名稱準備
??前述1.1部分已經配置好了輸出檔案存放的路徑,但是還沒有進行輸出檔案檔案名的配置;因此這里我們需要配置好每一個做差后的遙感影像的檔案存放路徑與名稱,其中,我們就直接以遙感影像的hv編號作為輸出結果檔案名,
DRT_out_file_path=out_file_path+"DRT/"
if not os.path.exists(DRT_out_file_path):
os.makedirs(DRT_out_file_path)
DRT_out_file_tif_path=os.path.join(DRT_out_file_path,rt_hv+".tif")
eco_out_file_path=out_file_path+"eco/"
if not os.path.exists(eco_out_file_path):
os.makedirs(eco_out_file_path)
eco_out_file_tif_path=os.path.join(eco_out_file_path,rt_hv+".tif")
wat_out_file_path=out_file_path+"wat/"
if not os.path.exists(wat_out_file_path):
os.makedirs(wat_out_file_path)
wat_out_file_tif_path=os.path.join(wat_out_file_path,rt_hv+".tif")
tim_out_file_path=out_file_path+"tim/"
if not os.path.exists(tim_out_file_path):
os.makedirs(tim_out_file_path)
tim_out_file_tif_path=os.path.join(tim_out_file_path,rt_hv+".tif")
??這一部分代碼分為了四個部分,是因為自有產品的LAI是分別依據四種演算法得到的,在做差時需要每一種演算法分別和GLASS產品進行相減,因此配置了四個輸出路徑檔案夾,
1.4 柵格檔案資料與資訊讀取
??接下來,利用gdal模塊對.tif與.hdf等兩種柵格影像加以讀取,
rt_raster=gdal.Open(rt_file_path+rt_file)
rt_band_num=rt_raster.RasterCount
rt_raster_array=rt_raster.ReadAsArray()
rt_lai_array=rt_raster_array[0]
rt_qa_array=rt_raster_array[1]
rt_lai_band=rt_raster.GetRasterBand(1)
# rt_lai_nodata=https://www.cnblogs.com/fkxxgis/p/rt_lai_band.GetNoDataValue()
# rt_lai_nodata=32767
# rt_lai_mask=np.ma.masked_equal(rt_lai_array,rt_lai_nodata)
rt_lai_array_mask=np.where(rt_lai_array>30000,np.nan,rt_lai_array)
rt_lai_array_fin=rt_lai_array_mask*0.001
gl_raster=gdal.Open(gl_file_path+gl_file)
gl_band_num=gl_raster.RasterCount
gl_raster_array=gl_raster.ReadAsArray()
gl_lai_array=gl_raster_array
gl_lai_band=gl_raster.GetRasterBand(1)
gl_lai_array_mask=np.where(gl_lai_array>1000,np.nan,gl_lai_array)
gl_lai_array_fin=gl_lai_array_mask*0.01
row=rt_raster.RasterYSize
col=rt_raster.RasterXSize
geotransform=rt_raster.GetGeoTransform()
projection=rt_raster.GetProjection()
??首先,以上述代碼的第一段為例進行講解,其中,gdal.Open()讀取柵格影像;.RasterCount獲取柵格影像波段數量;.ReadAsArray()將柵格影像各波段的資訊讀取為Array格式,當波段數量大于1時,其共有三維,第一維為波段的個數;rt_raster_array[0]表示取Array中的第一個波段,在本文中也就是自有產品的LAI波段;rt_qa_array=rt_raster_array[1]則表示取出第二個波段,在本文中也就是自有產品的QA波段;.GetRasterBand(1)表示獲取柵格影像中的第一個波段(注意,這里序號不是從0開始而是從1開始);np.where(rt_lai_array>30000,np.nan,rt_lai_array)表示利用np.where()函式對Array中第一個波段中像素>30000加以選取,并將其設定為nan,其他值不變,這一步驟是消除影像中填充值、Nodata值的方法,最后一句*0.001是將圖層原有的縮放系數復原,
??其次,上述代碼第三段為獲取柵格行、列數與投影變換資訊,
1.5 差值計算與QA波段篩選
??接下來,首先對自有產品與GLASS產品加以做差操作,隨后需要對四種演算法分別加以提取,
lai_dif=rt_lai_array_fin-gl_lai_array_fin
lai_dif=lai_dif*1000
rt_qa_array_bin=copy.copy(rt_qa_array)
rt_qa_array_row,rt_qa_array_col=rt_qa_array.shape
for i in range(rt_qa_array_row):
for j in range(rt_qa_array_col):
rt_qa_array_bin[i][j]="{:012b}".format(rt_qa_array_bin[i][j])[-4:]
# DRT_pixel_pos=np.where((rt_qa_array_bin>=100) & (rt_qa_array_bin==11))
# eco_pixel_pos=np.where((rt_qa_array_bin<100) & (rt_qa_array_bin==111))
# wat_pixel_pos=np.where((rt_qa_array_bin<1000) & (rt_qa_array_bin==1011))
# tim_pixel_pos=np.where((rt_qa_array_bin<1100) & (rt_qa_array_bin==1111))
# colormap=plt.cm.Greens
# plt.figure(1)
# # plt.subplot(2,4,1)
# plt.imshow(rt_lai_array_fin,cmap=colormap,interpolation='none')
# plt.title("RT_LAI")
# plt.colorbar()
# plt.figure(2)
# # plt.subplot(2,4,2)
# plt.imshow(gl_lai_array_fin,cmap=colormap,interpolation='none')
# plt.title("GLASS_LAI")
# plt.colorbar()
# plt.figure(3)
# dif_colormap=plt.cm.get_cmap("Spectral")
# plt.imshow(lai_dif,cmap=dif_colormap,interpolation='none')
# plt.title("Difference_LAI (RT-GLASS)")
# plt.colorbar()
DRT_lai_dif_array=np.where((rt_qa_array_bin>=100) | (rt_qa_array_bin==11),
np.nan,lai_dif)
eco_lai_dif_array=np.where((rt_qa_array_bin<100) | (rt_qa_array_bin==111),
np.nan,lai_dif)
wat_lai_dif_array=np.where((rt_qa_array_bin<1000) | (rt_qa_array_bin==1011),
np.nan,lai_dif)
tim_lai_dif_array=np.where((rt_qa_array_bin<1100) | (rt_qa_array_bin==1111),
np.nan,lai_dif)
# plt.figure(4)
# plt.imshow(DRT_lai_dif_array)
# plt.colorbar()
# plt.figure(5)
# plt.imshow(eco_lai_dif_array)
# plt.colorbar()
# plt.figure(6)
# plt.imshow(wat_lai_dif_array)
# plt.colorbar()
# plt.figure(7)
# plt.imshow(tim_lai_dif_array)
# plt.colorbar()
??其中,上述代碼前兩句為差值計算與資料化整,將資料轉換為整數,可以減少結果資料圖層的資料量(因為不需要存盤小數了),
??隨后,開始依據QA波段進行資料篩選與掩膜,其實各類遙感影像(例如MODIS、Landsat等)的QA波段都是比較近似的:通過一串二進制碼來表示遙感影像的質量、資訊等,其中不同的位元位往往都代表著一種特性,例如下圖所示為Landsat Collection 2 Level-2的QA波段含義,
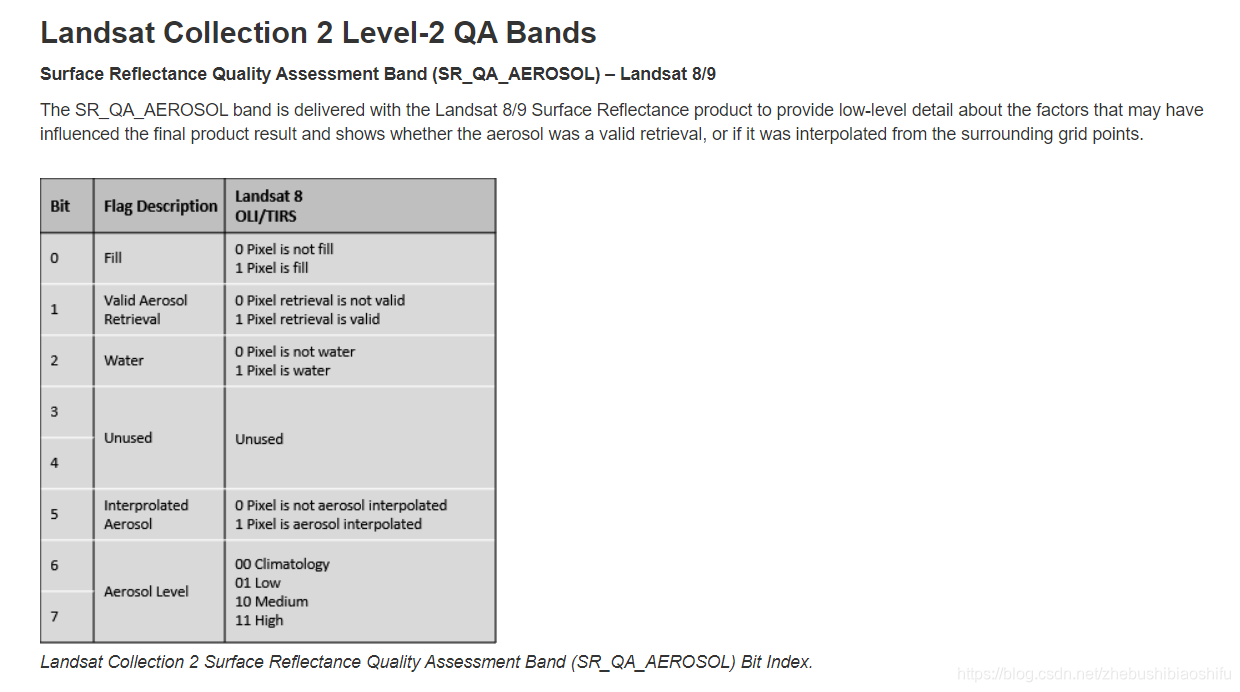
??在這里,QA波段原本為十進制(一般遙感影像為了節省空間,QA波段都是寫成十進制的形式),因此需要將其轉換為二進制;隨后通過獲取指定需要的二進制資料位數(在本文中也就是能確定自有產品中這一像素來自于哪一種演算法的二進制位數),從而判斷這一像素所得LAI是通過哪一種演算法得到的,從而將每種演算法對應的像素分別放在一起處理,DRT_lai_dif_array等四個變數分別表示四種演算法中,除了自己這一種演算法得到的像素之外的其他所有像素;之所以選擇這種方式,是因為后期我們可以將其直接掩膜掉,那么剩下的就是這種演算法自身的像素了,
??其中,上述代碼注釋掉的plt相關內容可以實作繪制空間分布圖,大家感興趣可以嘗試使用,
1.6 結果柵格檔案寫入與保存
??接下來,將我們完成上述差值計算與依據演算法進行篩選后的影像保存,
driver=gdal.GetDriverByName("Gtiff")
out_DRT_lai=driver.Create(DRT_out_file_tif_path,row,col,1,gdal.GDT_Float32)
out_DRT_lai.SetGeoTransform(geotransform)
out_DRT_lai.SetProjection(projection)
out_DRT_lai.GetRasterBand(1).WriteArray(DRT_lai_dif_array)
out_DRT_lai=None
driver=gdal.GetDriverByName("Gtiff")
out_eco_lai=driver.Create(eco_out_file_tif_path,row,col,1,gdal.GDT_Float32)
out_eco_lai.SetGeoTransform(geotransform)
out_eco_lai.SetProjection(projection)
out_eco_lai.GetRasterBand(1).WriteArray(eco_lai_dif_array)
out_eco_lai=None
driver=gdal.GetDriverByName("Gtiff")
out_wat_lai=driver.Create(wat_out_file_tif_path,row,col,1,gdal.GDT_Float32)
out_wat_lai.SetGeoTransform(geotransform)
out_wat_lai.SetProjection(projection)
out_wat_lai.GetRasterBand(1).WriteArray(wat_lai_dif_array)
out_wat_lai=None
driver=gdal.GetDriverByName("Gtiff")
out_tim_lai=driver.Create(tim_out_file_tif_path,row,col,1,gdal.GDT_Float32)
out_tim_lai.SetGeoTransform(geotransform)
out_tim_lai.SetProjection(projection)
out_tim_lai.GetRasterBand(1).WriteArray(tim_lai_dif_array)
out_tim_lai=None
print(rt_hv)
??其中,.GetDriverByName("Gtiff")表示保存為.tif格式的GeoTIFF檔案;driver.Create(DRT_out_file_tif_path,row,col,1,gdal.GDT_Float32)表示按照路徑、行列數、波段數與資料格式等建立一個新的柵格圖層,作為輸出圖層的框架;其后表示分別將地理投影轉換資訊與像素具體數值分別賦予這一新建的柵格圖層;最后=None表示將其從記憶體空間中釋放,完成寫入與保存作業,
2 完整代碼
??本文所需完整代碼如下:
# -*- coding: utf-8 -*-
"""
Created on Thu Jul 15 19:36:15 2021
@author: fkxxgis
"""
import os
import copy
import numpy as np
import pylab as plt
from osgeo import gdal
# rt_file_path="G:/Postgraduate/LAI_Glass_RTlab/Rc_Lai_A2018161_h12v03.tif"
# gl_file_path="G:/Postgraduate/LAI_Glass_RTlab/GLASS01E01.V50.A2018161.h12v03.2020323.hdf"
# out_file_path="G:/Postgraduate/LAI_Glass_RTlab/test.tif"
rt_file_path="I:/LAI_RTLab/A2018161/"
gl_file_path="I:/LAI_Glass/2018161/"
out_file_path="I:/LAI_Dif/"
rt_file_list=os.listdir(rt_file_path)
for rt_file in rt_file_list:
file_name_split=rt_file.split("_")
rt_hv=file_name_split[3][:-4]
gl_file_list=os.listdir(gl_file_path)
for gl_file in gl_file_list:
if rt_hv in gl_file:
rt_file_tif_path=rt_file_path+rt_file
gl_file_tif_path=gl_file_path+gl_file
DRT_out_file_path=out_file_path+"DRT/"
if not os.path.exists(DRT_out_file_path):
os.makedirs(DRT_out_file_path)
DRT_out_file_tif_path=os.path.join(DRT_out_file_path,rt_hv+".tif")
eco_out_file_path=out_file_path+"eco/"
if not os.path.exists(eco_out_file_path):
os.makedirs(eco_out_file_path)
eco_out_file_tif_path=os.path.join(eco_out_file_path,rt_hv+".tif")
wat_out_file_path=out_file_path+"wat/"
if not os.path.exists(wat_out_file_path):
os.makedirs(wat_out_file_path)
wat_out_file_tif_path=os.path.join(wat_out_file_path,rt_hv+".tif")
tim_out_file_path=out_file_path+"tim/"
if not os.path.exists(tim_out_file_path):
os.makedirs(tim_out_file_path)
tim_out_file_tif_path=os.path.join(tim_out_file_path,rt_hv+".tif")
rt_raster=gdal.Open(rt_file_path+rt_file)
rt_band_num=rt_raster.RasterCount
rt_raster_array=rt_raster.ReadAsArray()
rt_lai_array=rt_raster_array[0]
rt_qa_array=rt_raster_array[1]
rt_lai_band=rt_raster.GetRasterBand(1)
# rt_lai_nodata=https://www.cnblogs.com/fkxxgis/p/rt_lai_band.GetNoDataValue()
# rt_lai_nodata=32767
# rt_lai_mask=np.ma.masked_equal(rt_lai_array,rt_lai_nodata)
rt_lai_array_mask=np.where(rt_lai_array>30000,np.nan,rt_lai_array)
rt_lai_array_fin=rt_lai_array_mask*0.001
gl_raster=gdal.Open(gl_file_path+gl_file)
gl_band_num=gl_raster.RasterCount
gl_raster_array=gl_raster.ReadAsArray()
gl_lai_array=gl_raster_array
gl_lai_band=gl_raster.GetRasterBand(1)
gl_lai_array_mask=np.where(gl_lai_array>1000,np.nan,gl_lai_array)
gl_lai_array_fin=gl_lai_array_mask*0.01
row=rt_raster.RasterYSize
col=rt_raster.RasterXSize
geotransform=rt_raster.GetGeoTransform()
projection=rt_raster.GetProjection()
lai_dif=rt_lai_array_fin-gl_lai_array_fin
lai_dif=lai_dif*1000
rt_qa_array_bin=copy.copy(rt_qa_array)
rt_qa_array_row,rt_qa_array_col=rt_qa_array.shape
for i in range(rt_qa_array_row):
for j in range(rt_qa_array_col):
rt_qa_array_bin[i][j]="{:012b}".format(rt_qa_array_bin[i][j])[-4:]
# DRT_pixel_pos=np.where((rt_qa_array_bin>=100) & (rt_qa_array_bin==11))
# eco_pixel_pos=np.where((rt_qa_array_bin<100) & (rt_qa_array_bin==111))
# wat_pixel_pos=np.where((rt_qa_array_bin<1000) & (rt_qa_array_bin==1011))
# tim_pixel_pos=np.where((rt_qa_array_bin<1100) & (rt_qa_array_bin==1111))
# colormap=plt.cm.Greens
# plt.figure(1)
# # plt.subplot(2,4,1)
# plt.imshow(rt_lai_array_fin,cmap=colormap,interpolation='none')
# plt.title("RT_LAI")
# plt.colorbar()
# plt.figure(2)
# # plt.subplot(2,4,2)
# plt.imshow(gl_lai_array_fin,cmap=colormap,interpolation='none')
# plt.title("GLASS_LAI")
# plt.colorbar()
# plt.figure(3)
# dif_colormap=plt.cm.get_cmap("Spectral")
# plt.imshow(lai_dif,cmap=dif_colormap,interpolation='none')
# plt.title("Difference_LAI (RT-GLASS)")
# plt.colorbar()
DRT_lai_dif_array=np.where((rt_qa_array_bin>=100) | (rt_qa_array_bin==11),
np.nan,lai_dif)
eco_lai_dif_array=np.where((rt_qa_array_bin<100) | (rt_qa_array_bin==111),
np.nan,lai_dif)
wat_lai_dif_array=np.where((rt_qa_array_bin<1000) | (rt_qa_array_bin==1011),
np.nan,lai_dif)
tim_lai_dif_array=np.where((rt_qa_array_bin<1100) | (rt_qa_array_bin==1111),
np.nan,lai_dif)
# plt.figure(4)
# plt.imshow(DRT_lai_dif_array)
# plt.colorbar()
# plt.figure(5)
# plt.imshow(eco_lai_dif_array)
# plt.colorbar()
# plt.figure(6)
# plt.imshow(wat_lai_dif_array)
# plt.colorbar()
# plt.figure(7)
# plt.imshow(tim_lai_dif_array)
# plt.colorbar()
driver=gdal.GetDriverByName("Gtiff")
out_DRT_lai=driver.Create(DRT_out_file_tif_path,row,col,1,gdal.GDT_Float32)
out_DRT_lai.SetGeoTransform(geotransform)
out_DRT_lai.SetProjection(projection)
out_DRT_lai.GetRasterBand(1).WriteArray(DRT_lai_dif_array)
out_DRT_lai=None
driver=gdal.GetDriverByName("Gtiff")
out_eco_lai=driver.Create(eco_out_file_tif_path,row,col,1,gdal.GDT_Float32)
out_eco_lai.SetGeoTransform(geotransform)
out_eco_lai.SetProjection(projection)
out_eco_lai.GetRasterBand(1).WriteArray(eco_lai_dif_array)
out_eco_lai=None
driver=gdal.GetDriverByName("Gtiff")
out_wat_lai=driver.Create(wat_out_file_tif_path,row,col,1,gdal.GDT_Float32)
out_wat_lai.SetGeoTransform(geotransform)
out_wat_lai.SetProjection(projection)
out_wat_lai.GetRasterBand(1).WriteArray(wat_lai_dif_array)
out_wat_lai=None
driver=gdal.GetDriverByName("Gtiff")
out_tim_lai=driver.Create(tim_out_file_tif_path,row,col,1,gdal.GDT_Float32)
out_tim_lai.SetGeoTransform(geotransform)
out_tim_lai.SetProjection(projection)
out_tim_lai.GetRasterBand(1).WriteArray(tim_lai_dif_array)
out_tim_lai=None
print(rt_hv)
??至此,大功告成,
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/544815.html
標籤:Python
上一篇:03運算子