摘要:這篇文章將詳細講解影像形態學知識,主要介紹影像腐蝕處理和膨脹處理,
本文分享自華為云社區《[Python從零到壹] 四十七.影像增強及運算篇之腐蝕和膨脹詳解》,作者: eastmount ,
一.形態學理論知識
數學形態學的應用可以簡化影像資料,保持它們基本的形狀特征,并出去不相干的結構,數學形態學的演算法有天然的并行實作的結構,主要針對的是二值影像(0或1),在影像處理方面,二值形態學經常應用到對影像進行分割、細化、抽取骨架、邊緣提取、形狀分析、角點檢測,分水嶺演算法等,由于其演算法簡單,演算法能夠并行運算所以經常應用到硬體中[1-2],
常見的影像形態學運算包括:
- 腐蝕
- 膨脹
- 開運算
- 閉運算
- 梯度運算
- 頂帽運算
- 底帽運算
這些運算在OpenCV中主要通過MorphologyEx()函式實作,它能利用基本的膨脹和腐蝕技術,來執行更加高級形態學變換,如開閉運算、形態學梯度、頂帽、黑帽等,也可以實作最基本的影像膨脹和腐蝕,其函式原型如下:
- dst = cv2.morphologyEx(src, model, kernel)
– src表示原始影像
– model表示影像進行形態學處理,包括:
(1)cv2.MORPH_OPEN:開運算(Opening Operation)
(2)cv2.MORPH_CLOSE:閉運算(Closing Operation)
(3)cv2.MORPH_GRADIENT:形態學梯度(Morphological Gradient)
(4)cv2.MORPH_TOPHAT:頂帽運算(Top Hat)
(5)cv2.MORPH_BLACKHAT:黑帽運算(Black Hat) - kernel表示卷積核,可以用numpy.ones()函式構建
二.影像腐蝕
影像的腐蝕(Erosion)和膨脹(Dilation)是兩種基本的形態學運算,主要用來尋找影像中的極小區域和極大區域,影像腐蝕類似于“領域被蠶食”,它將影像中的高亮區域或白色部分進行縮減細化,其運行結果比原圖的高亮區域更小,
設A,B為集合,A被B的腐蝕,記為A-B,其定義為:
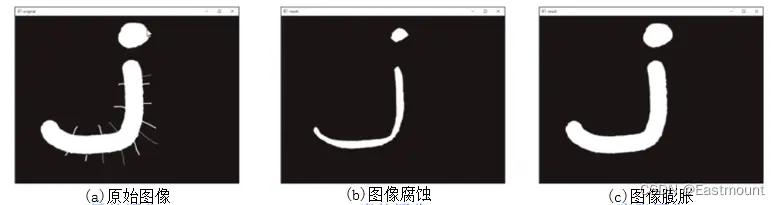
該公式表示影像A用卷積模板B來進行腐蝕處理,通過模板B與影像A進行卷積計算,得出B覆寫區域的像素點最小值,并用這個最小值來替代參考點的像素值,如圖1所示,將左邊的原始影像A腐蝕處理為右邊的效果圖A-B,
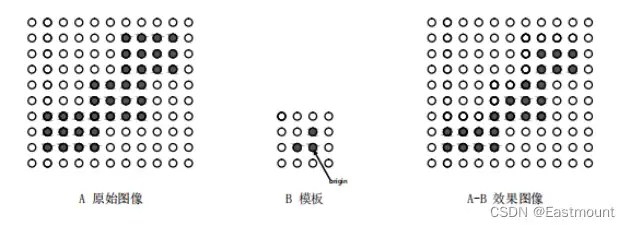
影像腐蝕主要包括二值影像和卷積核兩個輸入物件,卷積核是腐蝕中的關鍵陣列,采用Numpy庫可以生成,卷積核的中心點逐個像素掃描原始影像,被掃描到的原始影像中的像素點,只有當卷積核對應的元素值均為1時,其值才為1,否則將其像素值修改為0,在Python中,主要呼叫OpenCV的erode()函式實作影像腐蝕,
其函式原型如下:
- dst = cv2.erode(src, kernel, iterations)
– src表示原始影像
– kernel表示卷積核
– iterations表示迭代次數,默認值為1,表示進行一次腐蝕操作
可以采用函式numpy.ones((5,5), numpy.uint8)創建5×5的卷積核,如下:
影像腐蝕操作的代碼如下所示:
# -*- coding: utf-8 -*- # By:Eastmount import cv2 import numpy as np #讀取圖片 src = cv2.imread('test01.jpg', cv2.IMREAD_UNCHANGED) #設定卷積核 kernel = np.ones((5,5), np.uint8) #影像腐蝕處理 erosion = cv2.erode(src, kernel) #顯示影像 cv2.imshow("src", src) cv2.imshow("result", erosion) #等待顯示 cv2.waitKey(0) cv2.destroyAllWindows()
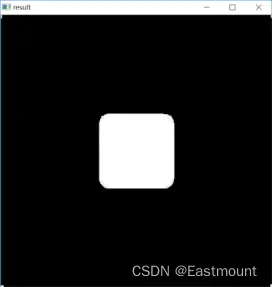
輸出結果如圖2所示,左邊表示原圖,右邊是腐蝕處理后的影像,可以發現影像中的干擾細線(噪聲)被清洗干凈,

如果腐蝕之后的影像仍然存在噪聲,可以設定迭代次數進行多次腐蝕操作,比如進行9次腐蝕操作的核心代碼如下:
- erosion = cv2.erode(src, kernel,iterations=9)
最終經過9次腐蝕處理的輸出影像如圖3所示,
三.影像膨脹
影像膨脹是腐蝕操作的逆操作,類似于“領域擴張”,它將影像中的高亮區域或白色部分進行擴張,其運行結果比原圖的高亮區域更大,
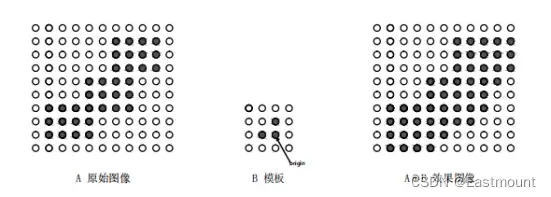
設A,B為集合,?為空集,A被B的膨脹,記為A⊕B,其中⊕為膨脹算子,膨脹定義為:
該公式表示用B來對影像A進行膨脹處理,其中B是一個卷積模板,其形狀可以為正方形或圓形,通過模板B與影像A進行卷積計算,掃描影像中的每一個像素點,用模板元素與二值影像元素做“與”運算,如果都為0,那么目標像素點為0,否則為1,從而計算B覆寫區域的像素點最大值,并用該值替換參考點的像素值實作影像膨脹,圖4是將左邊的原始影像A膨脹處理為右邊的效果圖A⊕B,
影像被腐蝕處理后,它將去除噪聲,但同時會壓縮影像,而影像膨脹操作可以去除噪聲并保持原有形狀,如圖5所示,
在Python中,主要呼叫OpenCV的dilate()函式實作影像腐蝕,函式原型如下:
- dst = cv2.dilate(src, kernel, iterations)
– src表示原始影像
– kernel表示卷積核,可以用numpy.ones()函式構建
– iterations表示迭代次數,默認值為1,表示進行一次膨脹操作
影像膨脹操作的代碼如下所示:
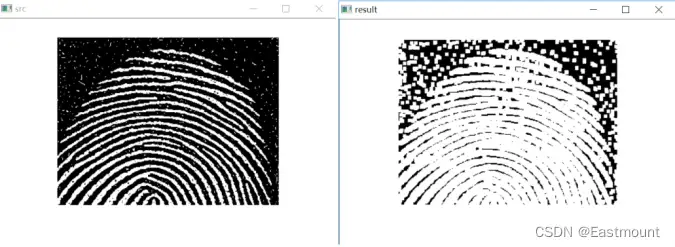
# -*- coding: utf-8 -*- # By:Eastmount import cv2 import numpy as np #讀取圖片 src = cv2.imread('zhiwen.png', cv2.IMREAD_UNCHANGED) #設定卷積核 kernel = np.ones((5,5), np.uint8) #影像膨脹處理 erosion = cv2.dilate(src, kernel) #顯示影像 cv2.imshow("src", src) cv2.imshow("result", erosion) #等待顯示 cv2.waitKey(0) cv2.destroyAllWindows()
輸出結果如圖6所示:
四.總結
本文主要介紹影像形態學處理,詳細講解了影像腐蝕處理和膨脹處理,數學形態學是一種應用于影像處理和模式識別領域的新方法,其基本思想是用具有一定形態的結構元素去量度和提取影像中對應形狀以達到對影像分析和識別目的,
參考文獻:
- [1]岡薩雷斯著,阮秋琦譯. 數字影像處理(第3版)[M]. 北京:電子工業出版社,2013.
- [2]阮秋琦. 數字影像處理學(第3版)[M]. 北京:電子工業出版社,2008.
- [3]毛星云,冷雪飛. OpenCV3編程入門[M]. 北京:電子工業出版社,2015.
- [4]Eastmount. [Python影像處理] 八.影像腐蝕與影像膨脹[EB/OL]. (2018-10-31). https://blog.csdn.net/Eastmount/article/details/83581277.
點擊關注,第一時間了解華為云新鮮技術~
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/553280.html
標籤:其他
上一篇:minikub linux安裝
下一篇:返回列表