本款結合遙控器+數傳+地面站三合一多功能手持終端(簡稱HGS_3IN1)開源產品是武漢無名創新科技有限公司繼以往開源產品:開源飛控、開源QT地面站、開源機器視覺后的又一全新力作,旨在為廣大無人機學習者提供完備的一站式無人機學習方案,為萌新進階成為無人機“全堆疊工程師”鋪路,
1、通訊模塊介紹
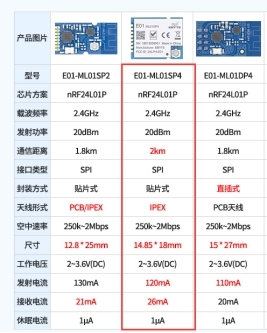
HGS_3IN1采用基于NRF24L01+PA+LNA的大功率、高靈敏度的2.4G無線模塊,增加了大功率RFX2401C功放芯片和LNA芯片、射頻開關與帶通濾波器使得模塊可以實作遠距離傳輸,最大空中傳輸速率為2Mbps,多頻點可以滿足多點通訊和調頻通訊,

接識訓+數傳端采用集成的無線射頻模塊ML01SP4,該模塊采用原裝進口芯片nRF24L01+PA,高精度電阻、電容、電感貼片制作,帶金屬屏蔽罩,保障在無人機空中端遭遇極端復雜電氣條件下的穩定資料傳輸,

2、遙控器硬體資源與介面介紹
遙控器采用主控芯片主流增強型ARM Cortex-M3 MCU的32位微處理器STM32F103RBT6,主頻72MHz,芯片具有128 KB Flash與20KB SRAM,兩個12位ADC,三個通用16位定時器以及一個PWM定時器,配備標準和高級通信介面:兩個I2C和SPI,多達5路串口,一個USB和一個CAN等,同時遙控器配備有2K外部EEPROM用于存盤設定資料,實作用戶操作記憶功能,
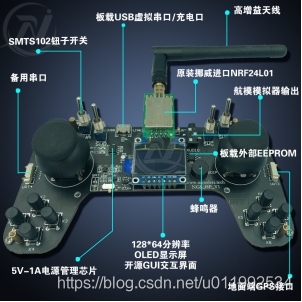
遙控器自帶5V/1A電源管理芯片,可以直接插入MICRO USB口對遙控器電池進行充電,配備880mAh大容量鋰電池,滿電狀態下可以實作長達600分鐘的持久作業,

配備128*84解析度的OLED顯示屏,配合遙控器開源GUI系統,可以實作人機友好的互動,

配備0955袖珍版蜂鳴器用于配合按鍵實作單擊、長按、保存已經特殊狀下的報警功能,
配備橫滾、俯仰、油門、偏航方向桿電位器,另外上方分布有SWA、SWD、SWC、SWD四路兩檔鈕子開關,以及左右2個輸出模擬量的撥盤電位器電位器VRA、VRB,
針對初學者用航模模擬器飛行,遙控器配備有AUDIO 3.5mm音頻耳機口,用于連接電腦音頻或者加密狗實作PC端的模擬飛行操作,

遙控器USB虛擬串口、URT1串口可以用于透明傳輸數傳端的資料給地面站,配合無名創新開源地面站可以實作狀態顯示、資料波形、引數除錯、飛控校準、基本串口收發等功能,

串口3用于連接GPS模塊,遙控器可以將自身決議到的GPS資料發送至飛控端,實作無人機的打點飛行與動態追蹤地面端物體等功能,串口4為備用串口,LINK介面用于SWD下載除錯介面,

板載8個獨立按鍵用于實作顯示屏翻頁、引數更改、引數保持、恢復默認等,下面列出每個按鍵的功能,
| 按鍵 | 短按 | 長按 |
|---|---|---|
| K1 | 無 | 無 |
| K2 | 引數單次自加 | 引數連續自加 |
| K3 | 無 | 發送GPS資料 |
| K4 | 引數單次一次 | 引數連續自減 |
| K5 | 向上翻頁 | 恢復默認引數 |
| K6 | 切上一行 | 無 |
| K7 | 向下翻頁 | 保存當前引數 |
| K8 | 切上下行 | 無 |
3、遙控器常規操作與設定
3.1 遙控器與接識訓的對碼
接識訓進入對碼狀態需要在接識訓上電的同時按下接識訓對碼按鍵,接識訓指示燈會進入快閃狀態,
遙控器進入對碼狀態操作如下,在遙控器關機狀態下保持按鍵K7持續按下,然后打開遙控器開關,遙控器會進入對碼狀態,RGB狀態指示燈紅燈進入閃爍狀態,對碼成功后蜂鳴器會長“嗶”一聲隨即進入正常作業界面,
遙控器進入對碼狀態后會根據芯片ID生成的唯一的遙控器頻道+通訊地址發送到當前正處于對碼狀態的接識訓,遙控器連續成功決議到發送成功標志位后,會自動對碼成功,接識訓接收到該遙控器頻道與通訊地址后,會將資料保存在內部FLASH里,后續接識訓正常上電時會讀取頻道、地址資料并配置NRF,從而實作與遙控器的配對,
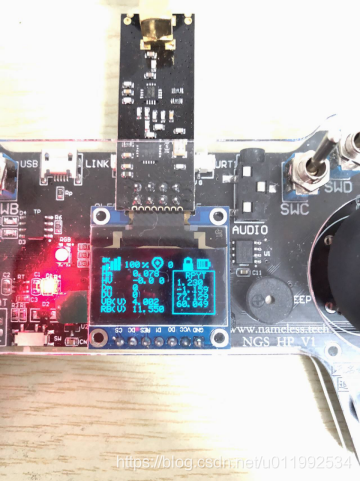
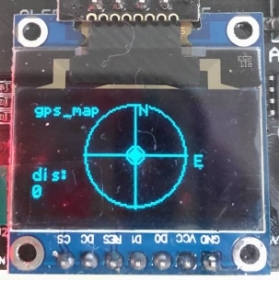
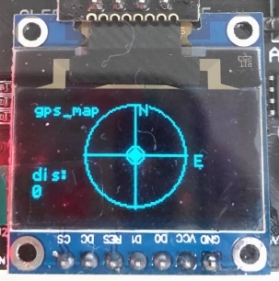
3.2 主頁關鍵資料顯示
遙控器主頁主要顯示和通訊連接質量、GPS定位星數,解鎖狀態、電池電量、飛行高度/半徑、爬升/巡航速度、姿態角、溫控系統溫度等關鍵資料,界面如下,
3.3 通訊頻道與地址的設定
遙控器默認通訊頻道與地址是根據芯片唯一ID生成的,當同一環境下存在多個設備處于同一或者相近設備時,資料可能會存在干擾,因此當發現遙控器與接識訓在近距離無遮擋狀態下,通訊信號模擬RSSI不為100%時,可以手動調整通訊頻道或者通訊地址,設定界面如下:
|
|
|
|---|---|
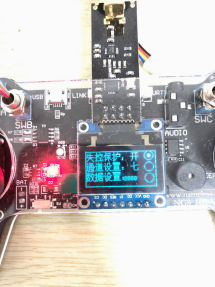
3.4 失控保護設定
遙控器失控保護用于在遙控器與接識訓通訊完全丟失或者通訊RSSI小于15%時,強制使遙控器某一通道輸出預先設定的失控值,飛控程式可以判斷此通道資料,做出自動返航、原地降落等操作,通常做法是將此通道序號和通道值與飛控一鍵返航通道對應,也可以單獨判斷,
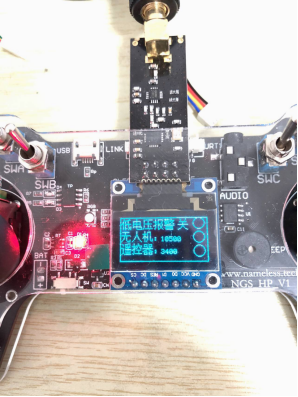
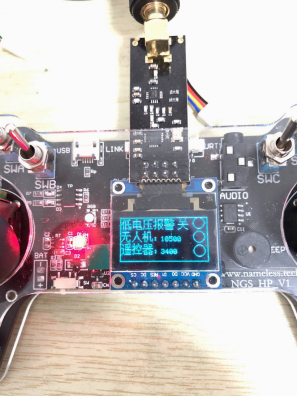
3.5 低壓報警
低壓報警用于設定遙控器安全電量與飛行器安全電量,實時判斷當前電壓值,當電壓低于設定安全值時,遙控器蜂鳴器會鳴響,用于提示操作者及時執行返航、降落操作,
3.6 模式通道設定
功能模式通道影射設定用于對遙控器輸出的5、6、7、8、9、10通道順序進行設定,其中每一個通道可選擇的有開關擋位SWA、SWB、SWC、SWD以及模擬通道VRA、VRB,用戶可以根據實際飛行器模式自行映射,

3.7 方向通道行程與偏移設定
針對遙控器前四個通道可以對行程與偏移進行設定,其中偏移可設定范圍為[-100,100],行程最小值設定范圍為[900,1500],行程最小值設定范圍為[1500,2100],需要調整的范圍比較大時,可以長按加減按鍵,時間越長加減速度越大,
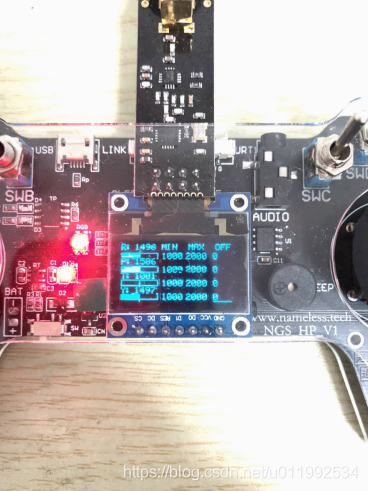
需要注意的是上述所有設定操作,需要長久保存即斷電重啟后仍然保存上次設定時,在設定完畢后需要長按K7進行保存,否則僅當次有效,需要恢復默認引數時,長按K5按鍵即可恢復出廠默認引數,
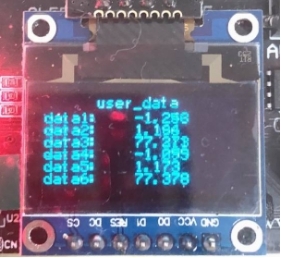
3.8 其它資料頁
用戶資料通道顯示、IMU資料顯示、GPS定位雷達顯示、板載GPS資料顯示等界面如下:

4、接識訓與數傳的使用
當僅作為接識訓使用時,只需要將配送的連接線焊接到模塊背面焊盤上,黑色線接GND(標號GD),紅色線接5V,白色線根據實際飛控支持的信號型別選擇PPM(標號PM)或者SBUS(標號SB)焊點,最終完成圖如下:


同時接收模塊同時支持串口透明傳輸功能,由于NRF24L01單次數傳最大資料量為32位元組,所以在作為透傳功能時,單幀資料不要超過32個,否者資料通訊會阻塞,影響最終通訊質量,當接識訓端透傳串口接無名創新系列飛控產品時,無名創新TI全系列開源飛控產品如下:
|
|
|
|---|---|
|
|
|




遙控器端可以通過USB虛擬串口、串口1輸出對應透傳資料,接無名創新地面站時即可實作無線串口資料傳輸功能,
本文附錄:
遙控器開源資料github鏈接:
https://github.com/wustyuyi/HGS_HP
https://download.csdn.net/download/u011992534/12868948
遙控器功能演示教程:
https://www.bilibili.com/video/BV1Gz4y1Q7gn
無名創新開源地面站教程:
https://blog.csdn.net/u011992534/article/details/105341638/
無名創新追夢者H7高階開源飛控學習平臺DreamerPilot(主控STM32H743VIT6)
https://www.bilibili.com/video/BV19T4y1L7j9#reply3509591146
https://www.bilibili.com/video/BV1Pi4y1u7Rd
追夢者H7高階開源飛控 雙IMU冗余
加速度計/陀螺儀:BMI088、ICM20689
磁力計:IST8310、AK8975 氣壓計:SPL06、FBM320
主要核心演算法 姿態解算+組合導航:擴展卡爾曼濾波(EKF)
控制演算法:ADRC+PID
傳感器濾波:8KHz采樣+高階數字濾波(低通、帶阻)
傳感器故障診斷:動態實時監測均方根誤差、方差等,選擇最優融合方案
支持多款地面站:無名地面站+MP/QGC 支持室內外光流/GPS定點、雷達地形跟蹤、定速巡航、航點航線飛行、SDK指令控制模式
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/102877.html
標籤:其他