這里我選擇的演算法是PTS演算法,
關于創新點,我初步考慮在PTS基礎上,適當的引入些TR的思想,并對PTS做一些改進,
傳統PTS > 一般性能
自適應+PTS > 較1有所提高
自適應+PTS 結合 限幅法 > 較2略有提高
“自限幅適應PTS” +“分段預留子載波” >較3進一步提高
傳統的PTS演算法,理論比較多,現成的資料也比較多,這里就不多做介紹了,通過仿真,對比PTS和沒有PTS下,
在做整體的復雜度分析的時候,發現這么做,系統過于復雜,雖然性能略有提高,但復雜度大大提高了,所以這里我修改了方法,使用門限的PTS,從而減少了系統的復雜度,
同時,加入限幅的思想,使得簡化的PTS性能優于同引數的PTS,從而實作,不僅簡化了系統,還提高了系統性能的目的,
這里,基本原理如下所示:
在PTS全域搜索的時候,預先設定好一個門限值,如果搜索到
![]()
那么就直接退出搜索,
所以使用這個方法,可以進行快速的搜索,而不用像全域搜索那樣,全部搜索一遍,這種門限法僅僅是抑制了高于門限值的出現的概率,而并沒有抑制低于門限值,
但是使用這個方法,可以大大降低PTS演算法的復雜度,
然后針對這個方法存在的局限,加入限幅的思想,從而抑制高于門限的值,
限幅器的設計如下所示:
C限幅門限PTS分段預留子載波
這個演算法,我的方法是適當的引入了TR的思路到改進后的PTS演算法中,引入的意義為:先預留出若干子載波來加載削峰信號,然后利用優化過的PTS演算法對OFDM符號的PAPR進行抑制,之后再利用改進的TR演算法對符號的PAPR進行進一步的抑制,
這么干的目的,就是使得,演算法在復雜度較低的情況下,進一步提高系統的性能,雖然傳統的PTS和TR演算法比較復雜,但是本方法,結合了兩種演算法的優勢,并使用其中的簡化方法,進行優勢互補,從而在演算法復雜度較低的情況下,進一步提高系統的性能,
這里,我們使用改進后的PTS和TR進行結合,整個演算法的流程如下所示:
步驟一:加入門限,降低PTS演算法的復雜度(但是這樣會降低性能)
當滿足要求:![]() 的時候
的時候
演算法就停止搜索,這樣的話,就降低的演算法的復雜度,但是會影響性能,
步驟二:加入限幅的方法
通過這個方法,可以在步驟一的基礎上,提高性能,使其在復雜度降低的前提下,保存系統的性能不變,
步驟三:改進PTS和TR的結合
為了和TR結合,首先,PTS分組必須為隨機分組,并隨機的保留一定的預留子載波,然后先執行PTS,再執行TR,
步驟四:執行TR
將得到的頻域信號X進行IFFT變換得到時域信號x,對x的每個子載波上的資料限幅,對取反后的限幅差值進行N點FFT變換,得到的頻域反向限幅差值信號的預留子載波上的資料即為削峰資料,用其替代X中預留子載波上的資料即可有效地消除峰值信號,
通過仿真,我們的演算法的仿真結果如下所示:
CCDF:
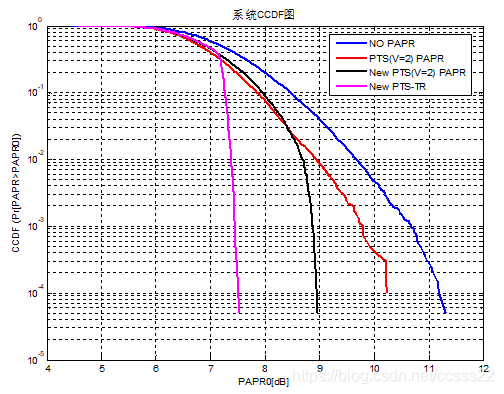
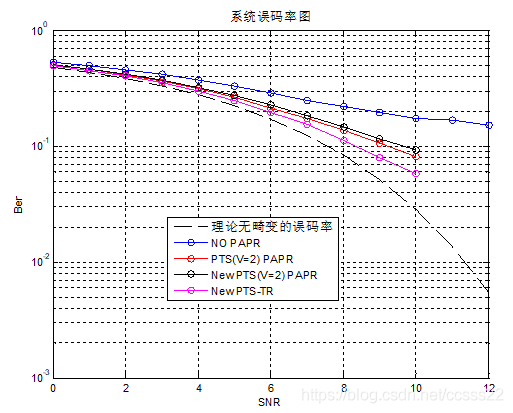
從上面的仿真結果可知,改進后的PTS-TR演算法,其誤碼率性能最佳,并且解決理論誤碼率曲線,
復雜度統計:
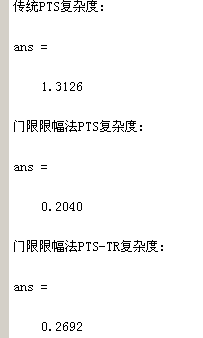
第一種,演算法的復雜度最大,第二種復雜度最小,第三種演算法,性能進一步提高了,而復雜度略微提高,
從上面的仿真結果可知,改進后的PTS演算法,在性能上和傳統的PTS演算法相似,但是其復雜度大大降低了,只有原演算法的1/7,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/135724.html
標籤:其他