Haclon中相機標定的步驟
1、生成標定檔案
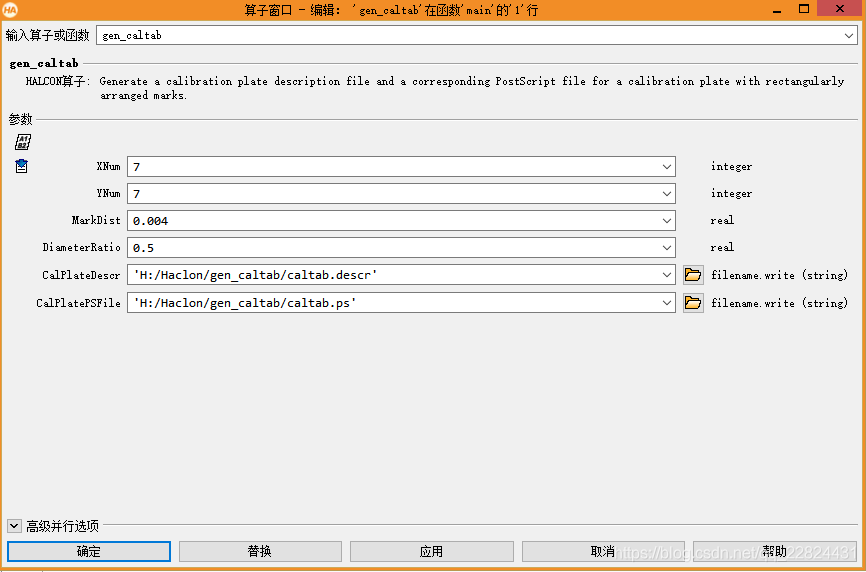
使用gen_caltab算子生成.descr的描述檔案,也就是世界坐標系與像素坐標系的關系,以后只要標定板不發生變化,可以重復使用,
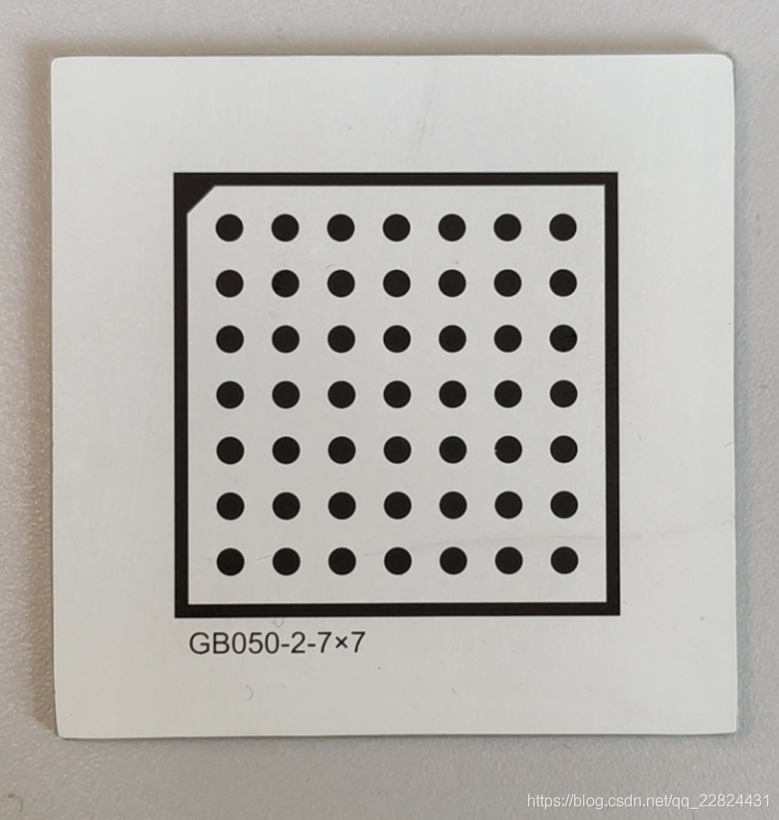
本次使用的標定板為GB050-2-7*7
其他標定板的引數參見下標:

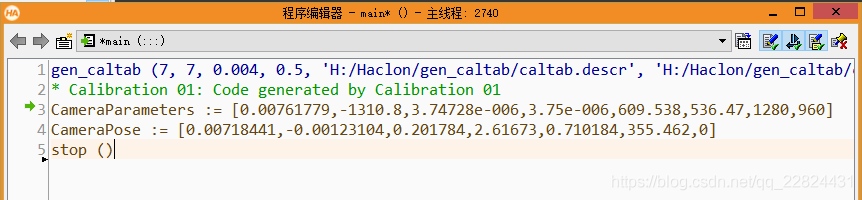
算子:gen_caltab (7, 7, 0.004, 0.5, 'H:/Haclon/gen_caltab/caltab.descr', 'H:/Haclon/gen_caltab/caltab.ps') ’
其中:
-
7*7是x,y方向上的標記數,
-
0.004是兩個實心圓點之間的中心距算子中,單位是m
-
剩下的兩個就是標定板的描述檔案的保存路徑,和資訊的路徑
使用其他標定板參照表中資訊進行填寫
2、使用助手進行標定
-
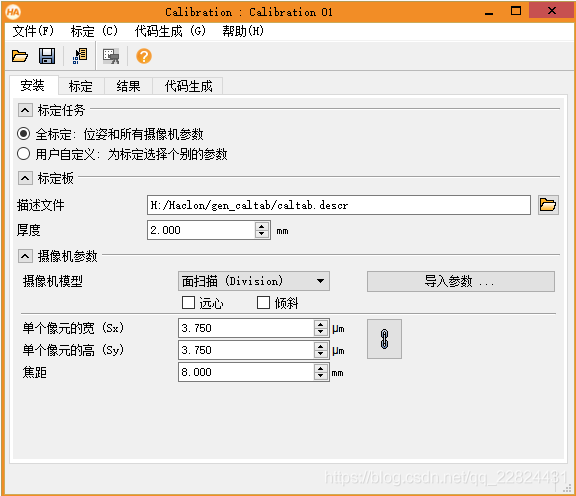
打開標注助手,匯入標定板下的描述檔案(上面生成的.descr描述檔案)
-
填寫標定板厚度:2mm
-
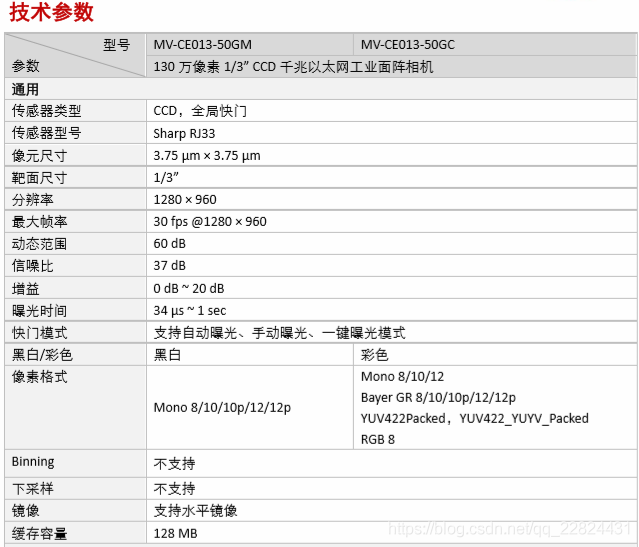
設定攝像機引數,本次使用的攝像頭型號為MV-CE013-50GM(其他參考用戶手冊),找出像元尺寸為3.75um*3.75um,填入助手,
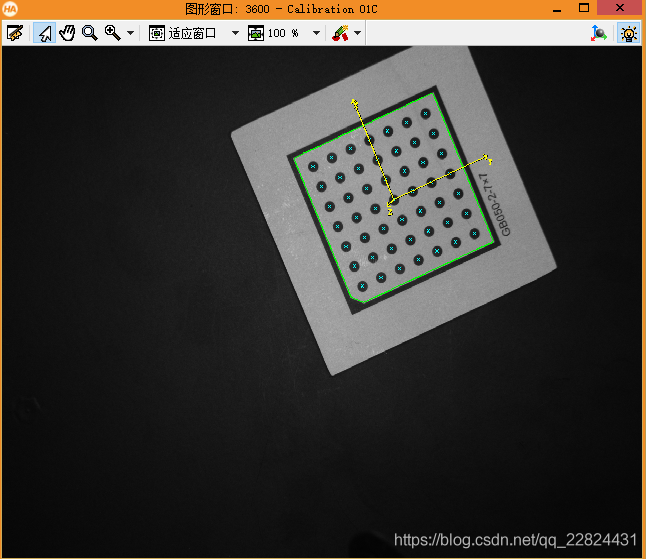
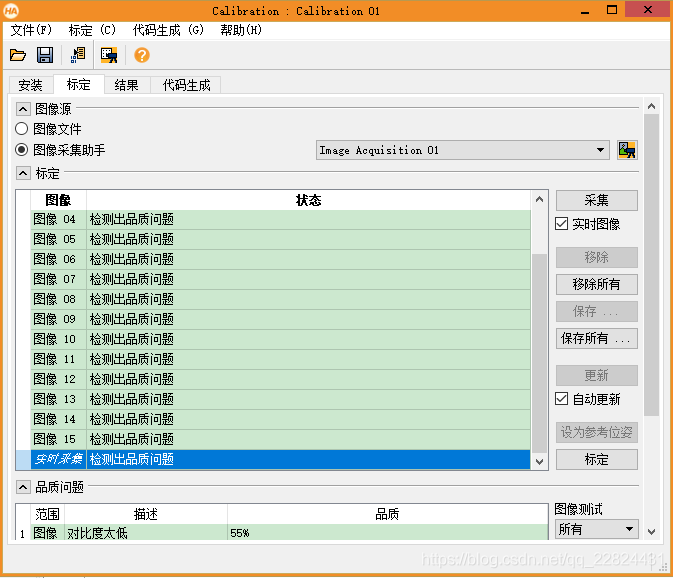
- 進入標定選項卡,打開實時影像,在圖形界面可以看到時實影像,獲取各個角度、位置的標定板圖片9-16張,并選擇其中一種圖片設定參考位姿,然后標定,
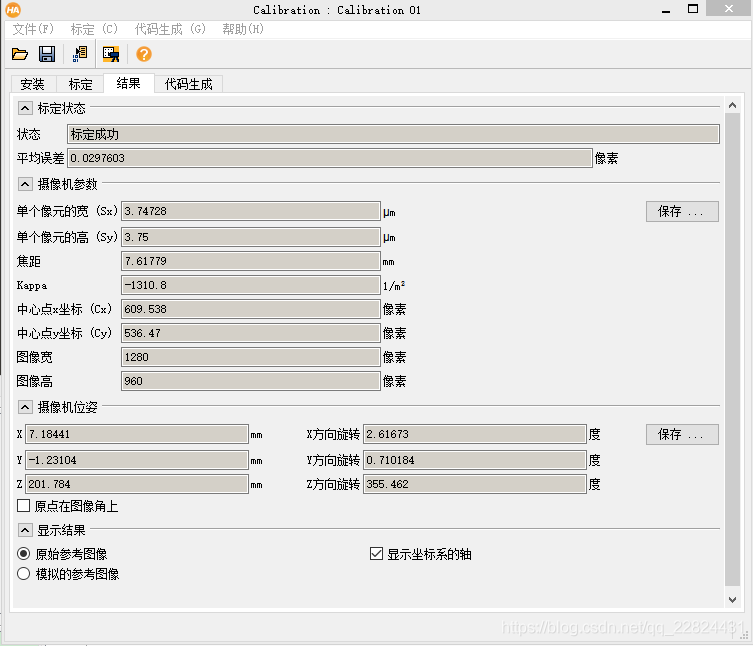
- 進入結果選項卡可以看到標定成功標志,其中攝像機引數就是所謂的相機內參,攝像機位姿就是所謂的相機外參,可以將其保存,相機內、外參,下次使用測量助手直接呼叫內外參檔案,
- 最后點擊插入代碼完成插入
至此完成相機的標定,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/135733.html
標籤:其他