題目描述
小 A 決定開始一場奇妙的徒步旅行,旅行地圖可以看成是一個平面直角坐標系,小 A 從家 O ( 0 , 0 ) O(0, 0) O(0,0)出發,每一步移動只能由他此時所在的位置 ( x , y ) (x,y) (x,y)走到以下四個坐標之一: ( x ? 1 , y ) , ( x , y ? 1 ) , ( x + 1 , y ) , ( x , y + 1 ) (x-1,y),(x,y-1),(x+1,y),(x,y+1) (x?1,y),(x,y?1),(x+1,y),(x,y+1),
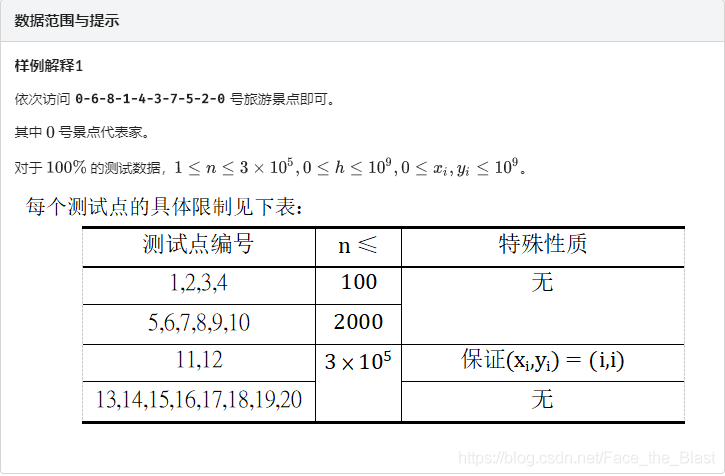
現在有 n n n個旅游景點,第 i i i個旅游景點位置為(xi ,yi),
由于世界如此之大,整個旅行地圖被分成了多個不同的氣候區,某個景點(xi ,yi)的氣候區Ci=max(xi ,yi) ,小 A 想要更好的了解這個世界使得他這次徒步旅行更有意義,所以他想要去氣候區 旅行當且僅當訪問完氣候區為 的所有旅游景點,當他訪問完所有的景點時,他會回到家里,
輸入格式
小 A 想讓你幫他設計出一條旅游路線使得他移動的步數最少,因為徒步旅行還是比較累的……
輸入格式
第一行輸入一個整數n,表示旅游景點數量,
接下來n行,每行一個整數對(xi ,yi)代表第 個景區的位置,
輸出格式
僅一行,表示小 A 完成旅行所需移動的最少步數,
樣例
樣例輸入1
8
2 2
1 4
2 3
3 1
3 4
1 1
4 3
1 2
樣例輸出1
20
樣例輸入2
5
2 1
1 0
2 0
3 2
0 3
樣例輸出2
12
分析
首先看到這一道題,一定會想到使用搜索(他把方向都告訴你了),
但我看了一眼資料——
1
0
9
10^9
109,(我TM直接放棄 )
所以說搜索是肯定會超時的,但終究有點分,
對于每一個氣候,可以發現它的起點和終點最有的取法一定是兩個端點,
在最優解中,只需要走到兩個端點,就可以遍歷玩這一氣候區的所有點,
然后……
先把輸入的
x
,
y
x,y
x,y按氣候區的從小到大排序,即:
bool cmp(Node x, Node y) {
return x.Map_C != y.Map_C ? x.Map_C < y.Map_C : (x.Map_X != y.Map_X ? x.Map_X < y.Map_X : x.Map_Y < y.Map_Y);
}
我們用兩個dp來存盤,一個存貯最左端點,一個存盤最右端點,
所以
d
p
1
[
i
]
=
m
i
n
(
d
p
1
[
i
?
1
]
+
c
a
l
c
(
l
[
i
?
1
]
,
r
[
i
]
)
,
d
p
2
[
i
?
1
]
+
c
a
l
c
(
r
[
i
?
1
]
,
r
[
i
]
)
)
+
c
a
l
c
(
r
[
i
]
,
l
[
i
]
)
;
dp1[i] = min(dp1[i - 1] + calc(l[i - 1], r[i]), dp2[i - 1] + calc(r[i - 1], r[i])) + calc(r[i], l[i]);
dp1[i]=min(dp1[i?1]+calc(l[i?1],r[i]),dp2[i?1]+calc(r[i?1],r[i]))+calc(r[i],l[i]);
d
p
2
[
i
]
=
m
i
n
(
d
p
1
[
i
?
1
]
+
c
a
l
c
(
l
[
i
?
1
]
,
l
[
i
]
)
,
d
p
2
[
i
?
1
]
+
c
a
l
c
(
r
[
i
?
1
]
,
l
[
i
]
)
)
+
c
a
l
c
(
l
[
i
]
,
r
[
i
]
)
;
dp2[i] = min(dp1[i - 1] + calc(l[i - 1], l[i]), dp2[i - 1] + calc(r[i - 1], l[i])) + calc(l[i], r[i]);
dp2[i]=min(dp1[i?1]+calc(l[i?1],l[i]),dp2[i?1]+calc(r[i?1],l[i]))+calc(l[i],r[i]);
l
[
i
]
l[i]
l[i]用于記錄最左端點的排序后順序,
r
[
i
]
r[i]
r[i]用于記錄最右端點的排序后順序,calc函式是用來計算兩點間距離的,不難想到:
long long calc(long long x, long long y) {
return abs(a[x].Map_X - a[y].Map_X) + abs(a[x].Map_Y - a[y].Map_Y);
}
(注:記得將氣候區離散化,否則會超時)
代碼實作
綜上所述,代碼就出來了
#include <map>
#include <set>
#include <cstdio>
#include <algorithm>
using namespace std;
#define ll long long
const ll MAXN = 3e5 + 5;
struct Node {
ll Map_X, Map_Y, Map_C;
};
set<ll> st;
map<ll, ll> mpl;
map<ll, ll> mpr;
map<ll, ll> id1;
map<ll, ll> id2;
map<ll, bool> mpX;
map<ll, bool> mpY;
Node a[MAXN];
ll dp1[MAXN], dp2[MAXN];
ll l[MAXN], r[MAXN];
ll n;
bool cmp(Node x, Node y) {
return x.Map_C != y.Map_C ? x.Map_C < y.Map_C : (x.Map_X != y.Map_X ? x.Map_X < y.Map_X : x.Map_Y < y.Map_Y);
}
ll calc(ll x, ll y) {
return abs(a[x].Map_X - a[y].Map_X) + abs(a[x].Map_Y - a[y].Map_Y);
}
void Read() {
scanf("%lld", &n);
mpX[0] = mpY[0] = 1;
for(ll i = 1; i <= n; i++) {
scanf("%lld %lld", &a[i].Map_X, &a[i].Map_Y);
a[i].Map_C = max(a[i].Map_X, a[i].Map_Y);
st.insert(a[i].Map_C);
}
for(set<ll>::iterator it = st.begin(); it != st.end(); it++) {
mpl[*it] = 0x7fffffff;
}
sort(a + 1, a + 1 + n, cmp);
for(ll i = 1; i <= n; i++) {
if(min(a[i].Map_X, a[i].Map_Y) <= mpl[a[i].Map_C]) {
mpl[a[i].Map_C] = min(mpl[a[i].Map_C], min(a[i].Map_X, a[i].Map_Y));
id2[a[i].Map_C] = i;
}
if(min(a[i].Map_X, a[i].Map_Y) >= mpr[a[i].Map_C]) {
mpr[a[i].Map_C] = max(mpr[a[i].Map_C], min(a[i].Map_X, a[i].Map_Y));
id1[a[i].Map_C] = i;
}
}
int p = 0;
for(set<ll>::iterator it = st.begin(); it != st.end(); it++) {
l[++p] = id2[*it];
r[p] = id1[*it];
}
for(ll i = 1; i <= p; i++) {
dp1[i] = min(dp1[i - 1] + calc(l[i - 1], r[i]), dp2[i - 1] + calc(r[i - 1], r[i])) + calc(r[i], l[i]);
dp2[i] = min(dp1[i - 1] + calc(l[i - 1], l[i]), dp2[i - 1] + calc(r[i - 1], l[i])) + calc(l[i], r[i]);
}
printf("%lld", min(dp1[p] + calc(l[p], 0), dp2[p] + calc(r[p], 0)));
}
int main() {
Read();
return 0;
}
可能有億點點麻煩,真就億點點唄,(小聲)
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/147050.html
標籤:其他
下一篇:菜雞程式猿日常