我一開始想既然mavlink在STM32的使用只需要呼叫函式就可以了,但是mavlink在STM32的代碼似乎比較多,我就想起直接看它的頭檔案有哪些函式,結果查看頭檔案有巨大發現
對應每種訊息都有專門一個頭檔案,我甚至找到了vision_positon_estimate的頭檔案,是不是要讀取某類訊息只需要呼叫這個對應訊息頭檔案里面的函式就可以了,
是不是在驅動檔案include這個頭檔案就可以了,然后直接呼叫就可以了,好像main檔案要Include mavros.h
https://blog.csdn.net/sinat_16643223/article/details/108916785
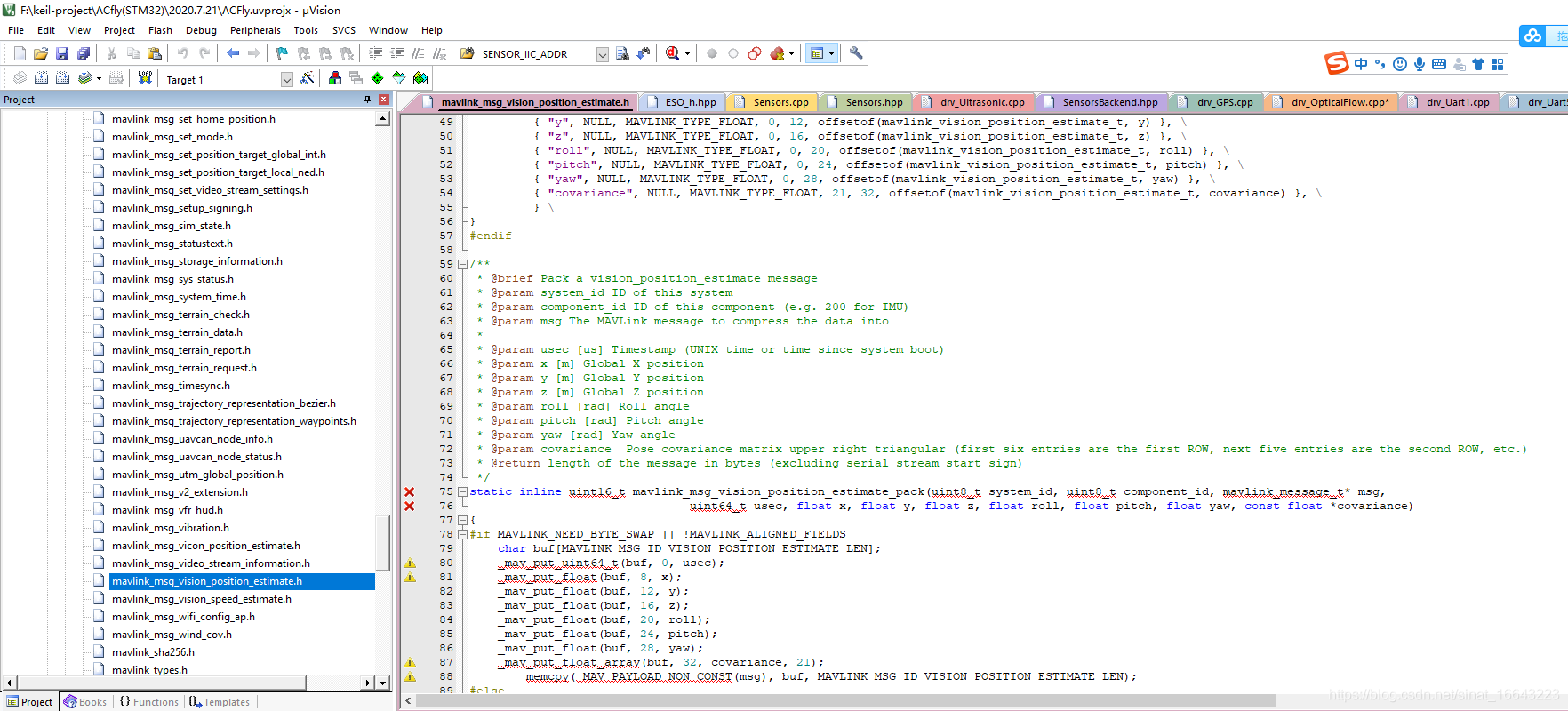
在這個頭檔案里面我找到了似乎是對應讀取某個引數的,這么來看用mavlink其實挺方便的,
那我再寫驅動或者ACfly的傳感器二次開發很方便了,都不需要自己寫協議決議,就呼叫一個函式得到資料之后直接傳給更新函式就行了,
static inline uint64_t mavlink_msg_vision_position_estimate_get_usec(const mavlink_message_t* msg)
{
return _MAV_RETURN_uint64_t(msg, 0);
}
/**
* @brief Get field x from vision_position_estimate message
*
* @return [m] Global X position
*/
static inline float mavlink_msg_vision_position_estimate_get_x(const mavlink_message_t* msg)
{
return _MAV_RETURN_float(msg, 8);
}
/**
* @brief Get field y from vision_position_estimate message
*
* @return [m] Global Y position
*/
static inline float mavlink_msg_vision_position_estimate_get_y(const mavlink_message_t* msg)
{
return _MAV_RETURN_float(msg, 12);
}
/**
* @brief Get field z from vision_position_estimate message
*
* @return [m] Global Z position
*/
static inline float mavlink_msg_vision_position_estimate_get_z(const mavlink_message_t* msg)
{
return _MAV_RETURN_float(msg, 16);
}
/**
* @brief Get field roll from vision_position_estimate message
*
* @return [rad] Roll angle
*/
static inline float mavlink_msg_vision_position_estimate_get_roll(const mavlink_message_t* msg)
{
return _MAV_RETURN_float(msg, 20);
}
/**
* @brief Get field pitch from vision_position_estimate message
*
* @return [rad] Pitch angle
*/
static inline float mavlink_msg_vision_position_estimate_get_pitch(const mavlink_message_t* msg)
{
return _MAV_RETURN_float(msg, 24);
}
/**
* @brief Get field yaw from vision_position_estimate message
*
* @return [rad] Yaw angle
*/
static inline float mavlink_msg_vision_position_estimate_get_yaw(const mavlink_message_t* msg)
{
return _MAV_RETURN_float(msg, 28);
}
/**
* @brief Get field covariance from vision_position_estimate message
*
* @return Pose covariance matrix upper right triangular (first six entries are the first ROW, next five entries are the second ROW, etc.)
*/
static inline uint16_t mavlink_msg_vision_position_estimate_get_covariance(const mavlink_message_t* msg, float *covariance)
{
return _MAV_RETURN_float_array(msg, covariance, 21, 32);
}
/**
* @brief Decode a vision_position_estimate message into a struct
*
* @param msg The message to decode
* @param vision_position_estimate C-struct to decode the message contents into
*/
static inline void mavlink_msg_vision_position_estimate_decode(const mavlink_message_t* msg, mavlink_vision_position_estimate_t* vision_position_estimate)
{
#if MAVLINK_NEED_BYTE_SWAP || !MAVLINK_ALIGNED_FIELDS
vision_position_estimate->usec = mavlink_msg_vision_position_estimate_get_usec(msg);
vision_position_estimate->x = mavlink_msg_vision_position_estimate_get_x(msg);
vision_position_estimate->y = mavlink_msg_vision_position_estimate_get_y(msg);
vision_position_estimate->z = mavlink_msg_vision_position_estimate_get_z(msg);
vision_position_estimate->roll = mavlink_msg_vision_position_estimate_get_roll(msg);
vision_position_estimate->pitch = mavlink_msg_vision_position_estimate_get_pitch(msg);
vision_position_estimate->yaw = mavlink_msg_vision_position_estimate_get_yaw(msg);
mavlink_msg_vision_position_estimate_get_covariance(msg, vision_position_estimate->covariance);
#else
uint8_t len = msg->len < MAVLINK_MSG_ID_VISION_POSITION_ESTIMATE_LEN? msg->len : MAVLINK_MSG_ID_VISION_POSITION_ESTIMATE_LEN;
memset(vision_position_estimate, 0, MAVLINK_MSG_ID_VISION_POSITION_ESTIMATE_LEN);
memcpy(vision_position_estimate, _MAV_PAYLOAD(msg), len);
#endif
}
還有一個問題,怎么給mavlink指定串口,指定是用哪個串口接收和發送,
下面這里有講到,這篇文章我也應該轉載過,
https://blog.csdn.net/sinat_16643223/article/details/108917748

這篇也講到了
https://blog.csdn.net/sinat_16643223/article/details/108918061
![]()
https://blog.csdn.net/sinat_16643223/article/details/108919187

https://blog.csdn.net/sinat_16643223/article/details/108919472

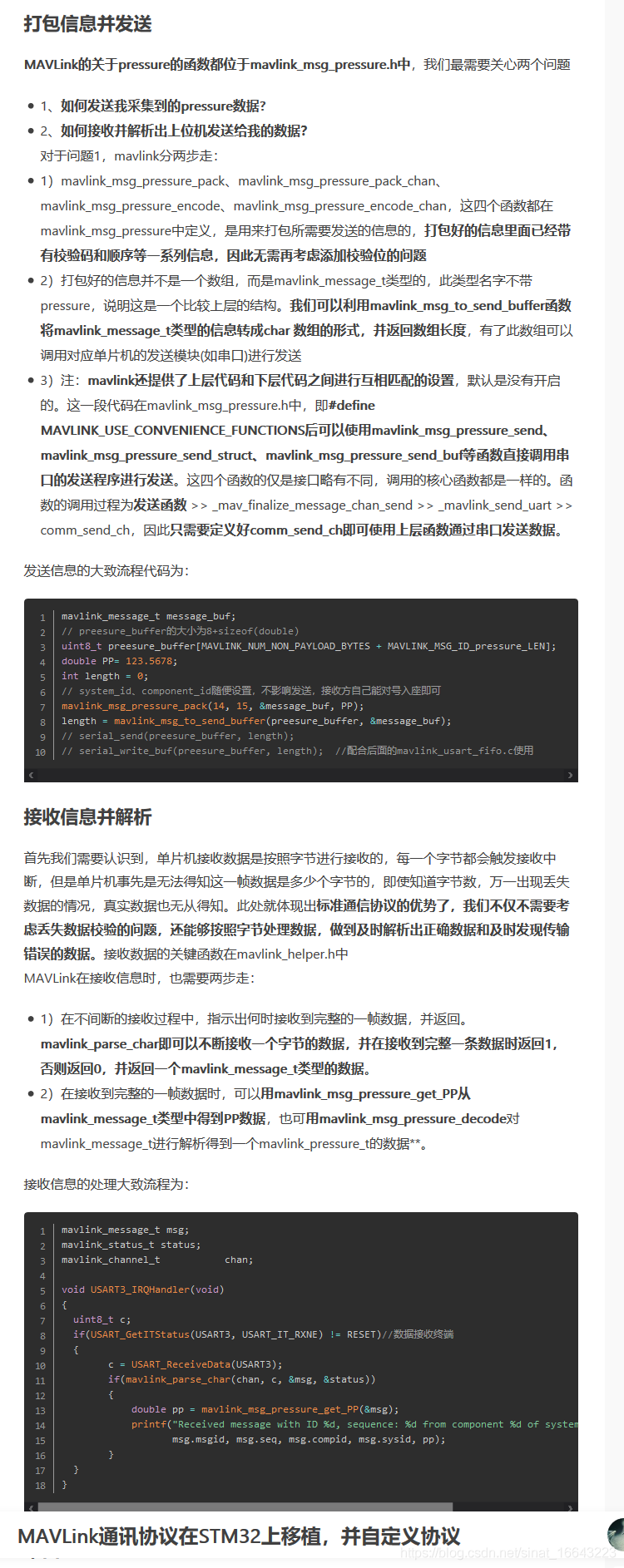
這下面的pressure應該泛指某一類訊息,比如可以用vision_positon_estimate替代掉pressure
而且下面說了接收訊息就是我上面找到的那幾個get函式!!!!!!
https://www.jianshu.com/p/e57aa664103f?from=singlemessage
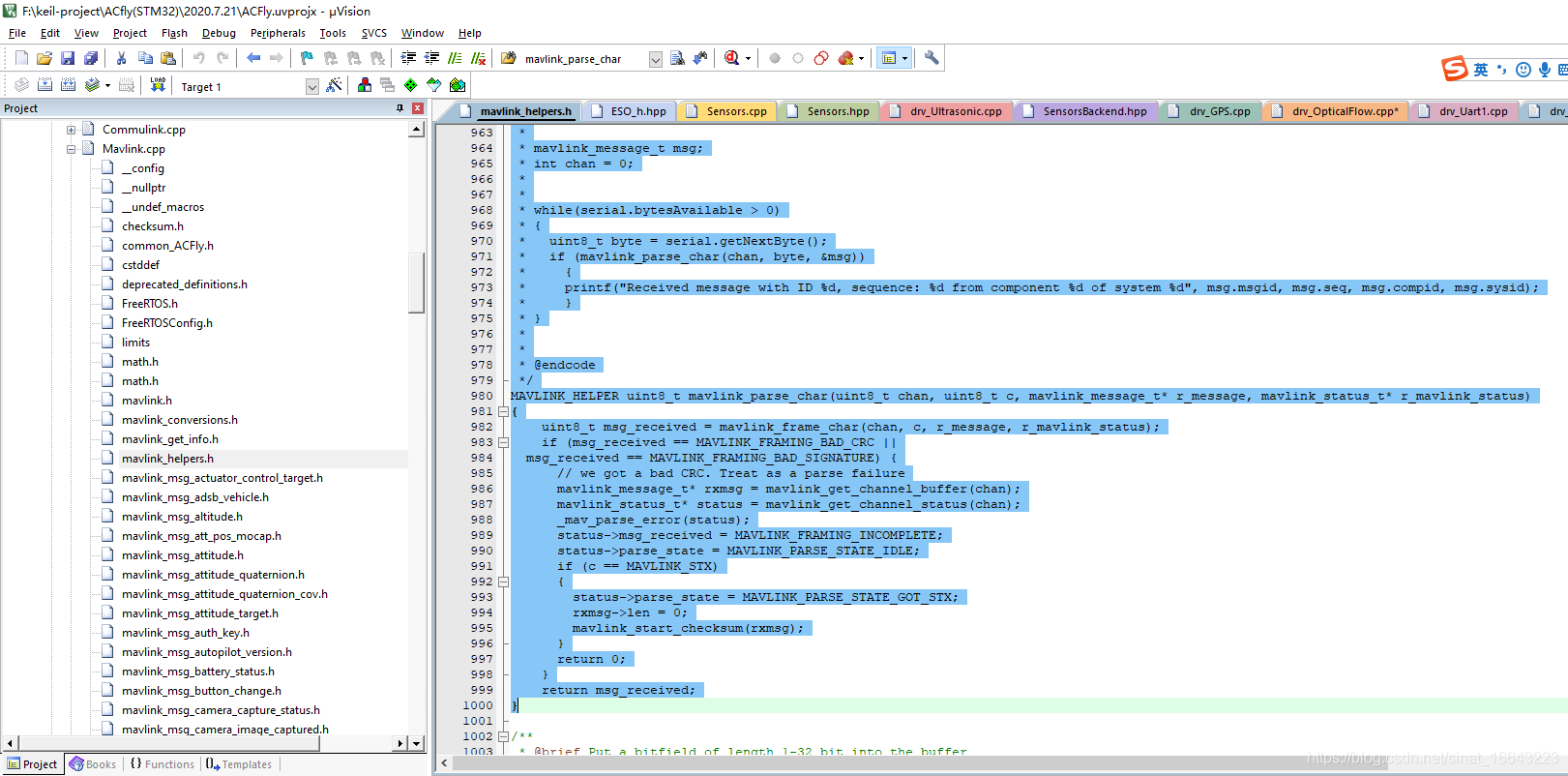
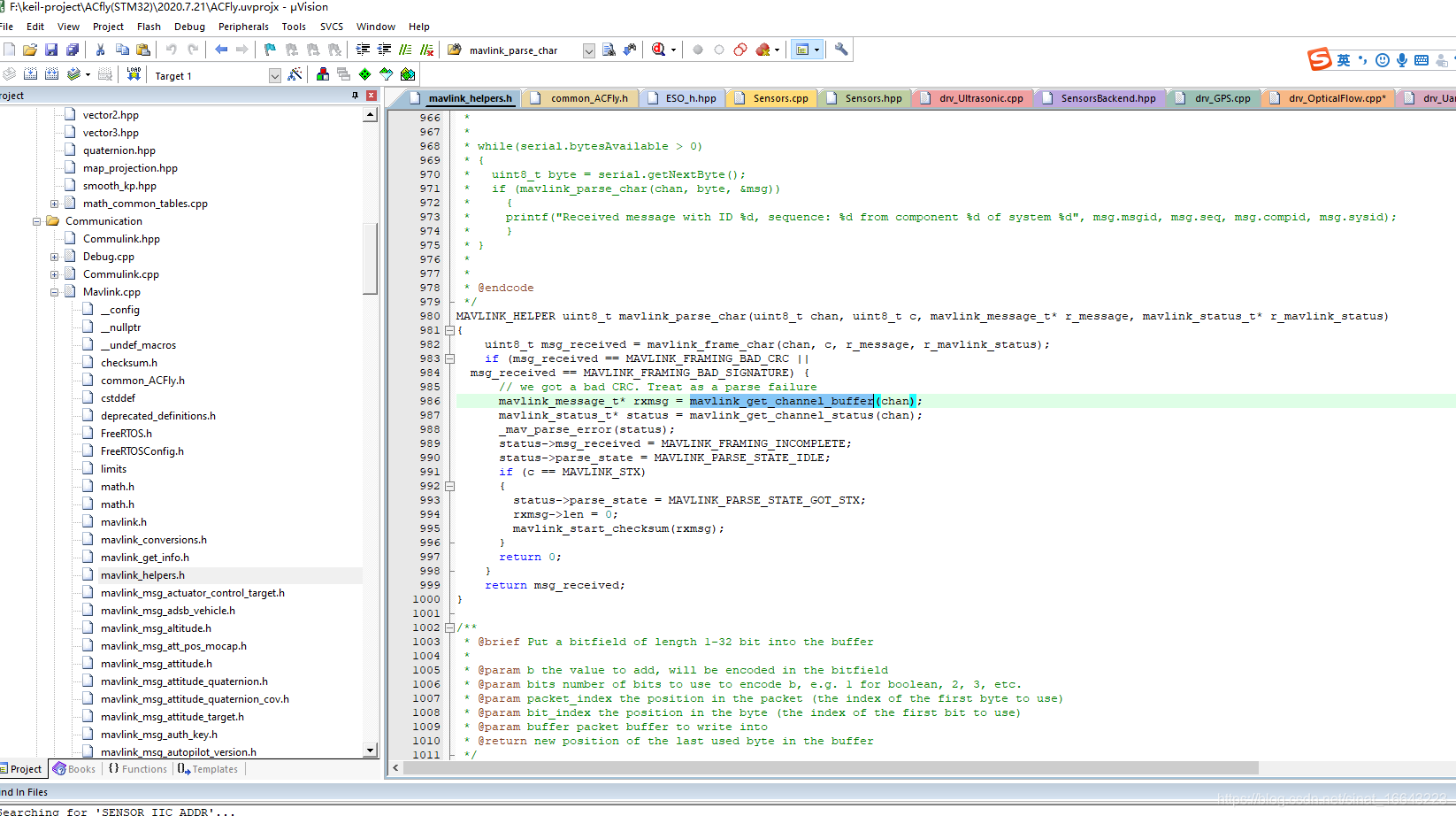
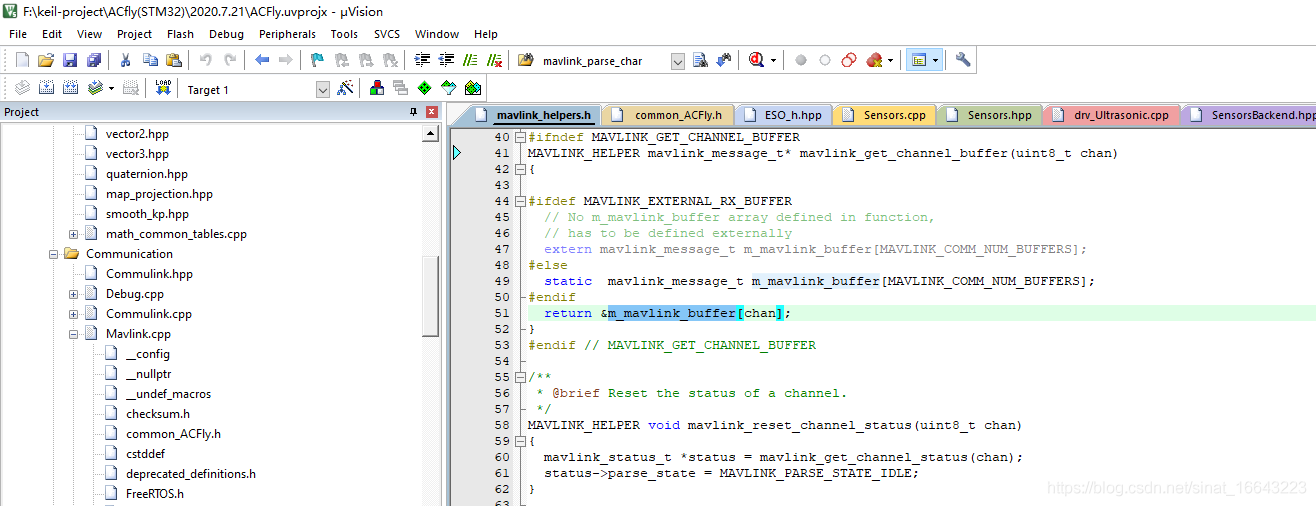
這個mavlink_parse_char函式我也找到了,是就在 mavlink_helpers.h中,直接ctrl + F可以搜到,
那它是在哪里指定用哪個串口的呢,
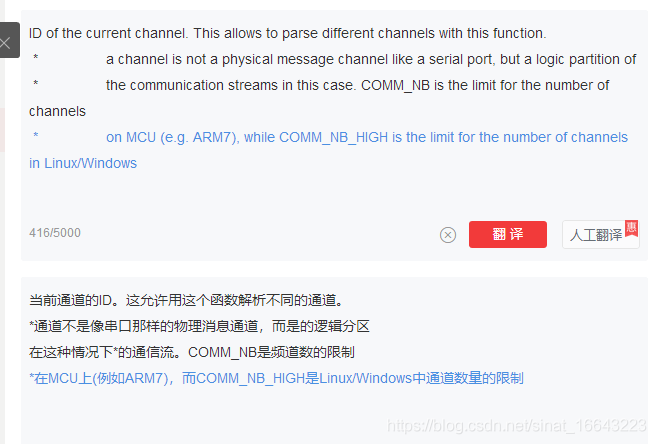
這個函式前面的注釋里面有對各個輸入引數解釋,似乎第一個引數就和串口有關?
chan應該就是channel的簡寫,應該就是通道的意思!!!!!!
/**
* This is a convenience function which handles the complete MAVLink parsing.
* the function will parse one byte at a time and return the complete packet once
* it could be successfully decoded. This function will return 0 or 1.
*
* Messages are parsed into an internal buffer (one for each channel). When a complete
* message is received it is copies into *returnMsg and the channel's status is
* copied into *returnStats.
*
* @param chan ID of the current channel. This allows to parse different channels with this function.
* a channel is not a physical message channel like a serial port, but a logic partition of
* the communication streams in this case. COMM_NB is the limit for the number of channels
* on MCU (e.g. ARM7), while COMM_NB_HIGH is the limit for the number of channels in Linux/Windows
* @param c The char to parse
*
* @param returnMsg NULL if no message could be decoded, the message data else
* @param returnStats if a message was decoded, this is filled with the channel's stats
* @return 0 if no message could be decoded or bad CRC, 1 on good message and CRC
*
* A typical use scenario of this function call is:
*
* @code
* #include <mavlink.h>
*
* mavlink_message_t msg;
* int chan = 0;
*
*
* while(serial.bytesAvailable > 0)
* {
* uint8_t byte = serial.getNextByte();
* if (mavlink_parse_char(chan, byte, &msg))
* {
* printf("Received message with ID %d, sequence: %d from component %d of system %d", msg.msgid, msg.seq, msg.compid, msg.sysid);
* }
* }
*
*
* @endcode
*/
MAVLINK_HELPER uint8_t mavlink_parse_char(uint8_t chan, uint8_t c, mavlink_message_t* r_message, mavlink_status_t* r_mavlink_status)
{
uint8_t msg_received = mavlink_frame_char(chan, c, r_message, r_mavlink_status);
if (msg_received == MAVLINK_FRAMING_BAD_CRC ||
msg_received == MAVLINK_FRAMING_BAD_SIGNATURE) {
// we got a bad CRC. Treat as a parse failure
mavlink_message_t* rxmsg = mavlink_get_channel_buffer(chan);
mavlink_status_t* status = mavlink_get_channel_status(chan);
_mav_parse_error(status);
status->msg_received = MAVLINK_FRAMING_INCOMPLETE;
status->parse_state = MAVLINK_PARSE_STATE_IDLE;
if (c == MAVLINK_STX)
{
status->parse_state = MAVLINK_PARSE_STATE_GOT_STX;
rxmsg->len = 0;
mavlink_start_checksum(rxmsg);
}
return 0;
}
return msg_received;
}
目前我的理解是,main函式里面include mavlink.h就可以,然后直接呼叫相應的接收函式,現在問題是那個埠怎么定義的,
ACfly里面mavlink埠方面的
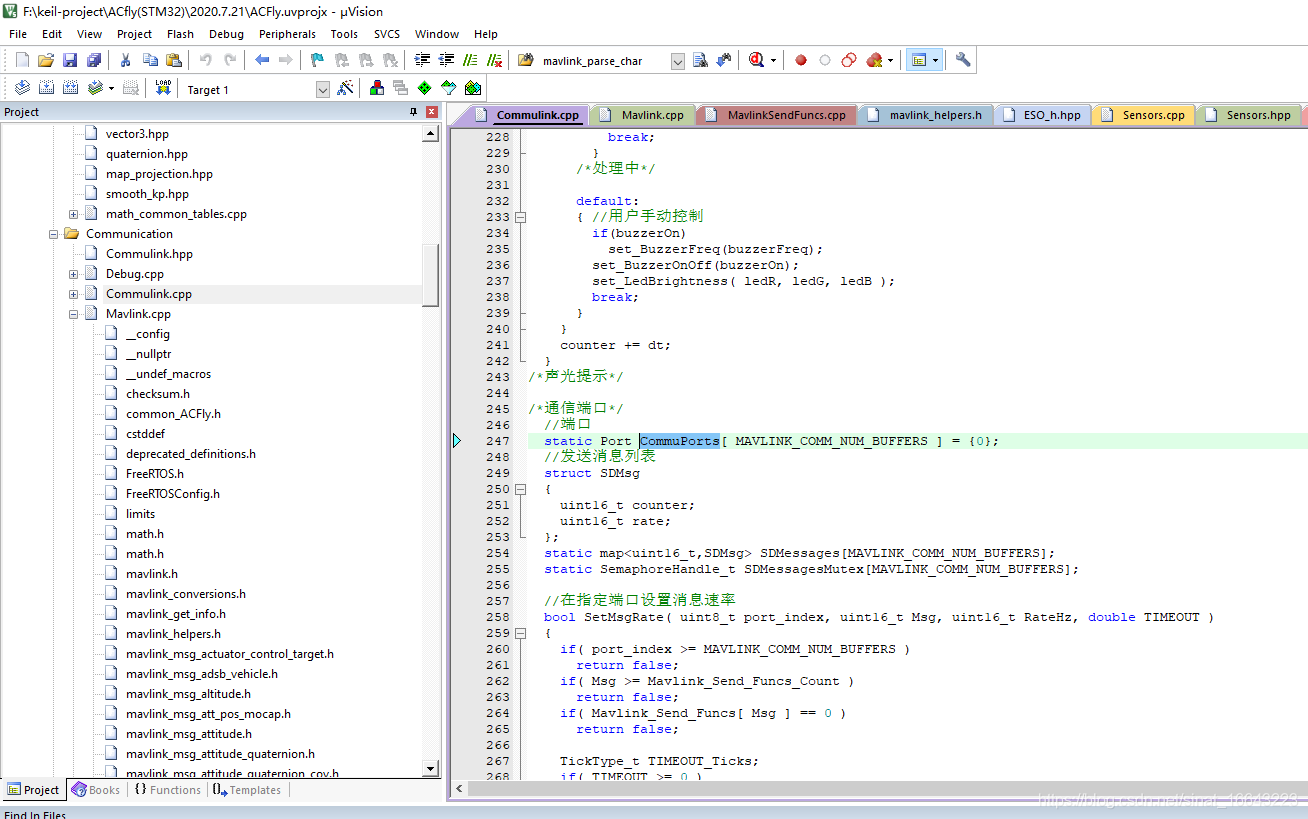
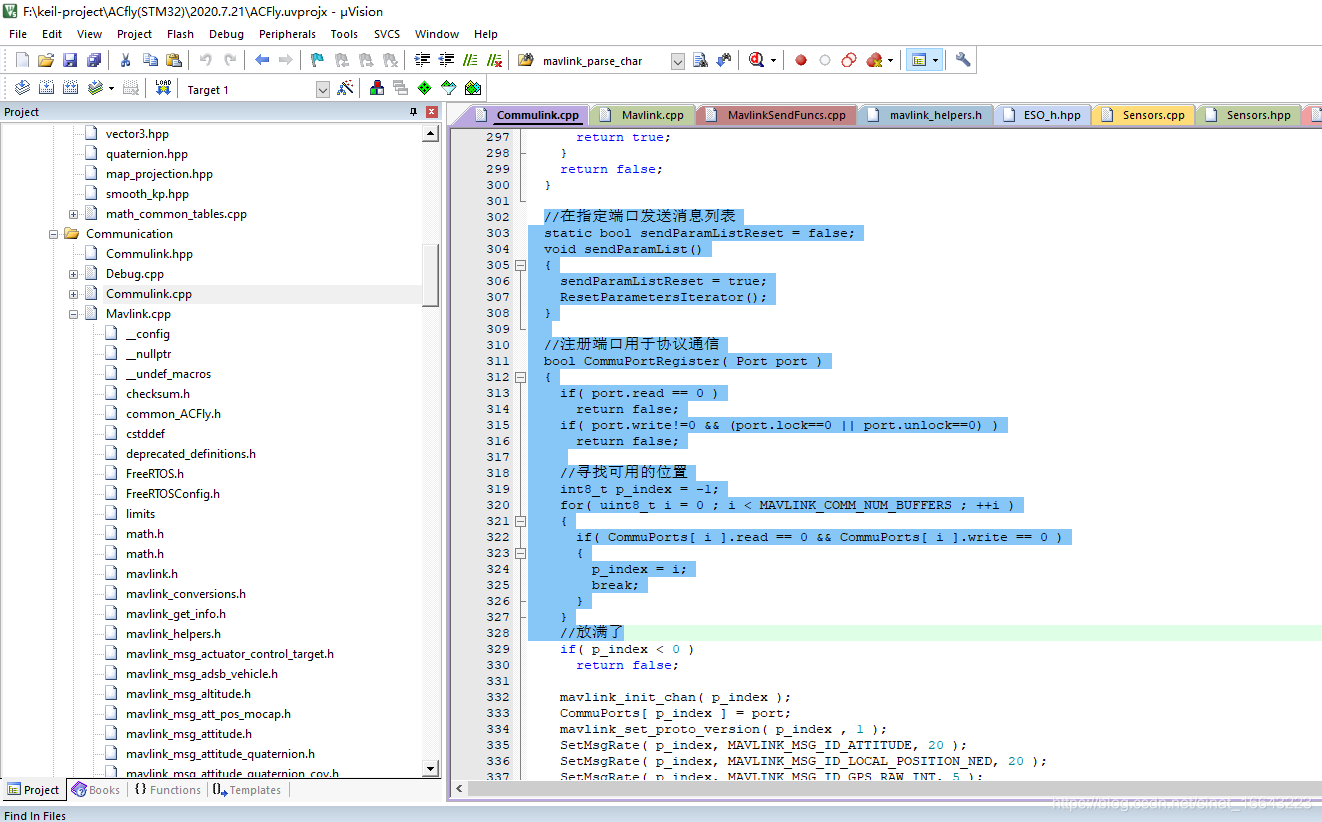
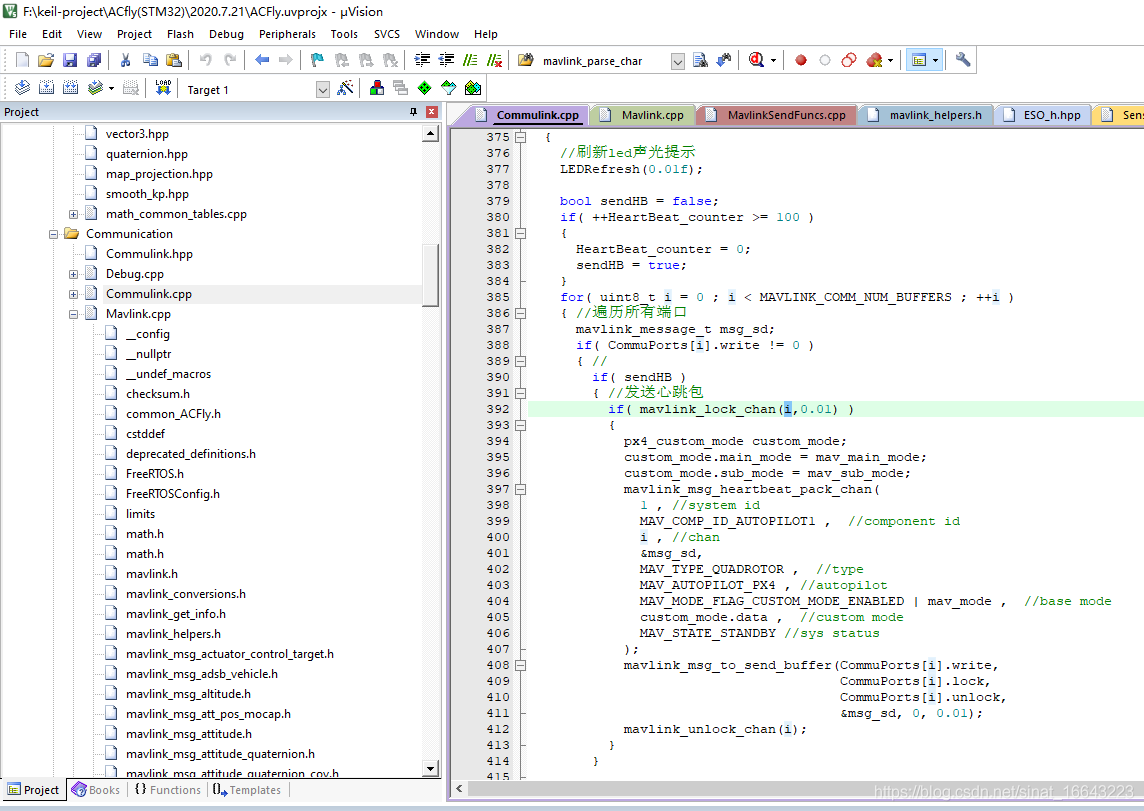
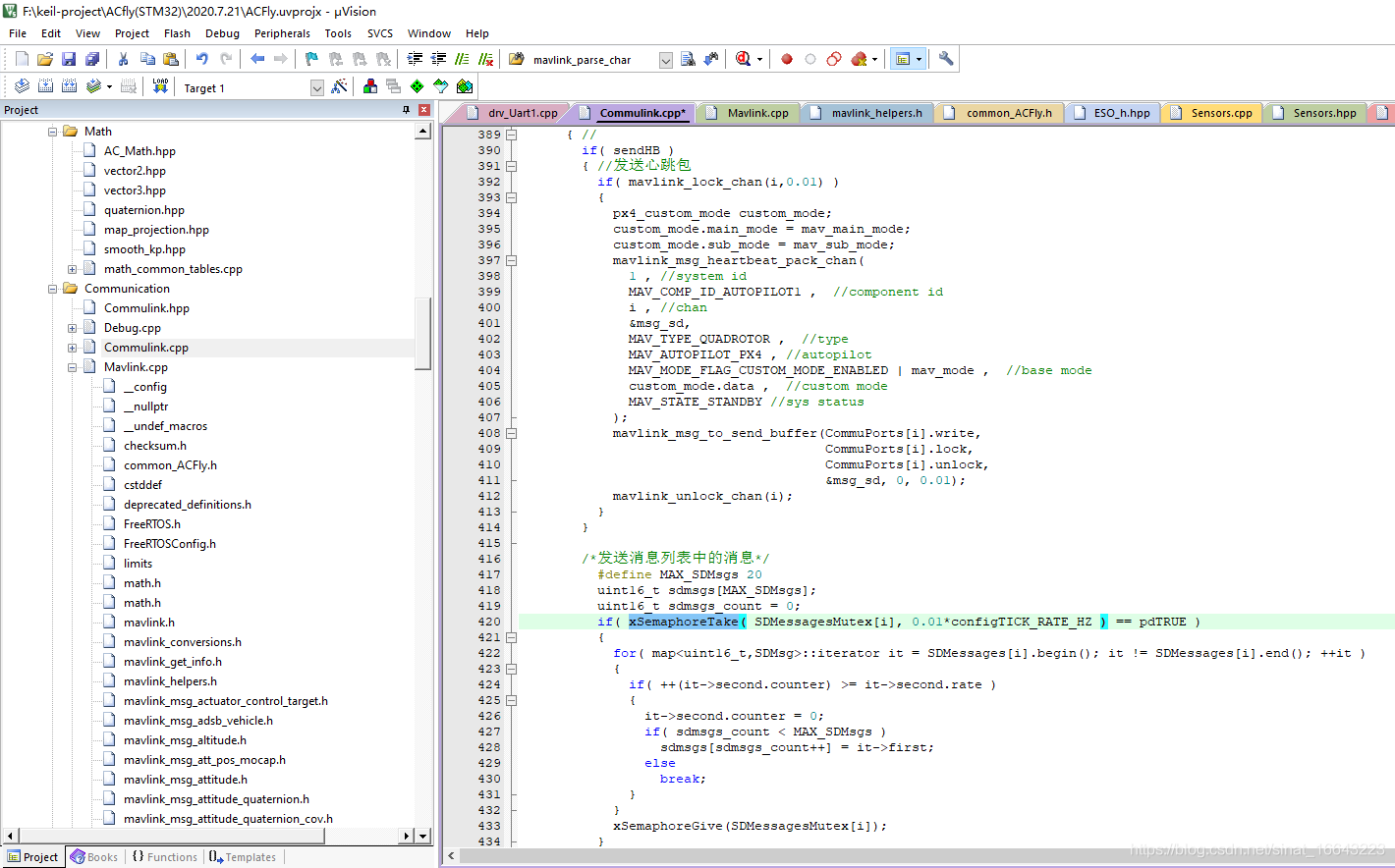
關于埠ACfly就是在commulink.cpp和commulink.h里面弄的!!!!像這個頭檔案里明確有寫注冊埠
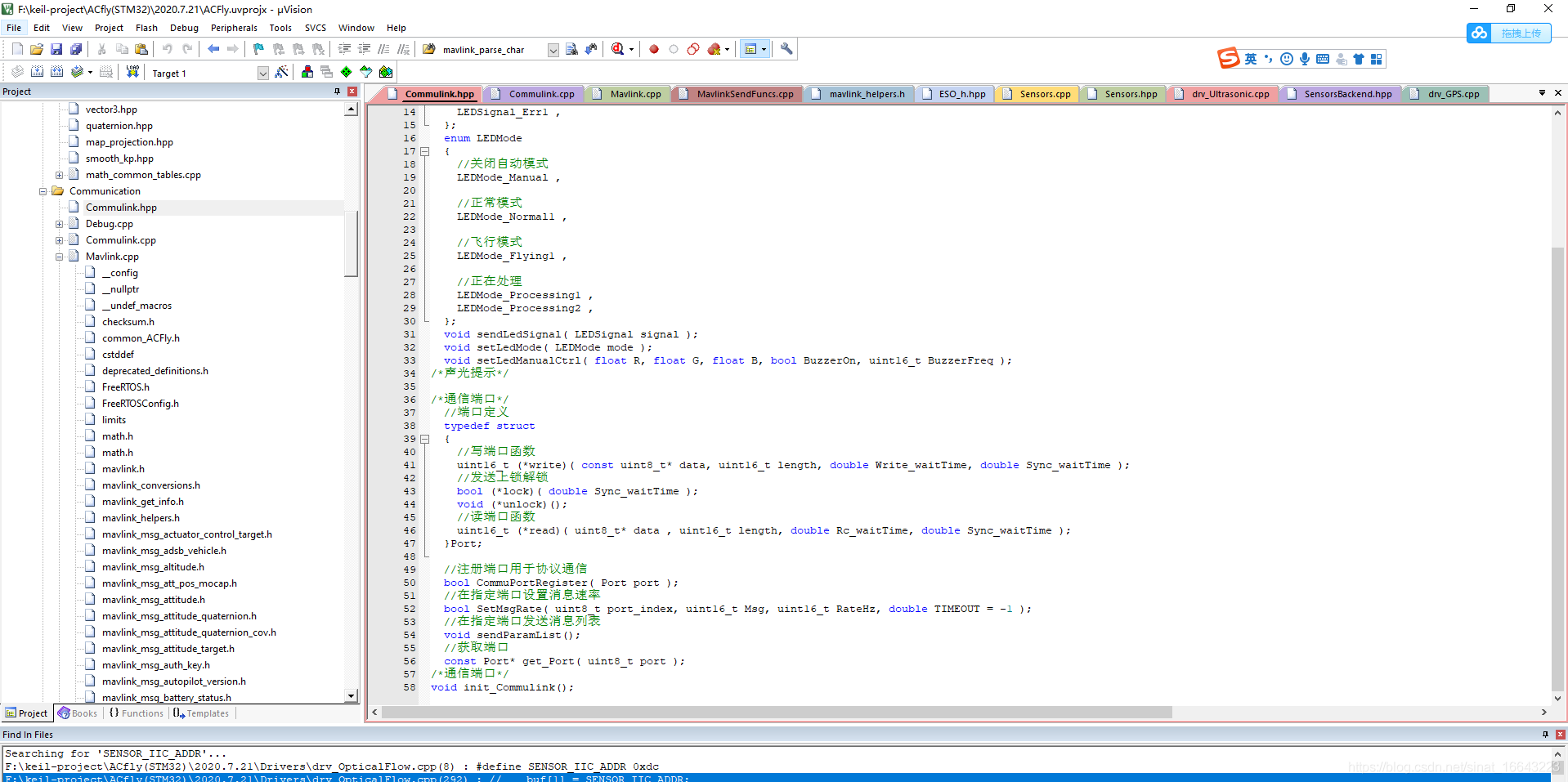
它應該mavlink里面有某個函式呼叫了串口接識訓者發送函式,我覺得你去深挖那個mavlink自己的接收函式應該是可以最終找到那個串口的函式的,
https://www.cnblogs.com/daxuezhidao/p/5809709.html
這是那個恒力久行自己寫的一個頭檔案,他的教程里是要把他寫的這個頭檔案加進去,
是的,一層層從
mavlink_parse_char函式開始深挖下去,可以找到一些線索,
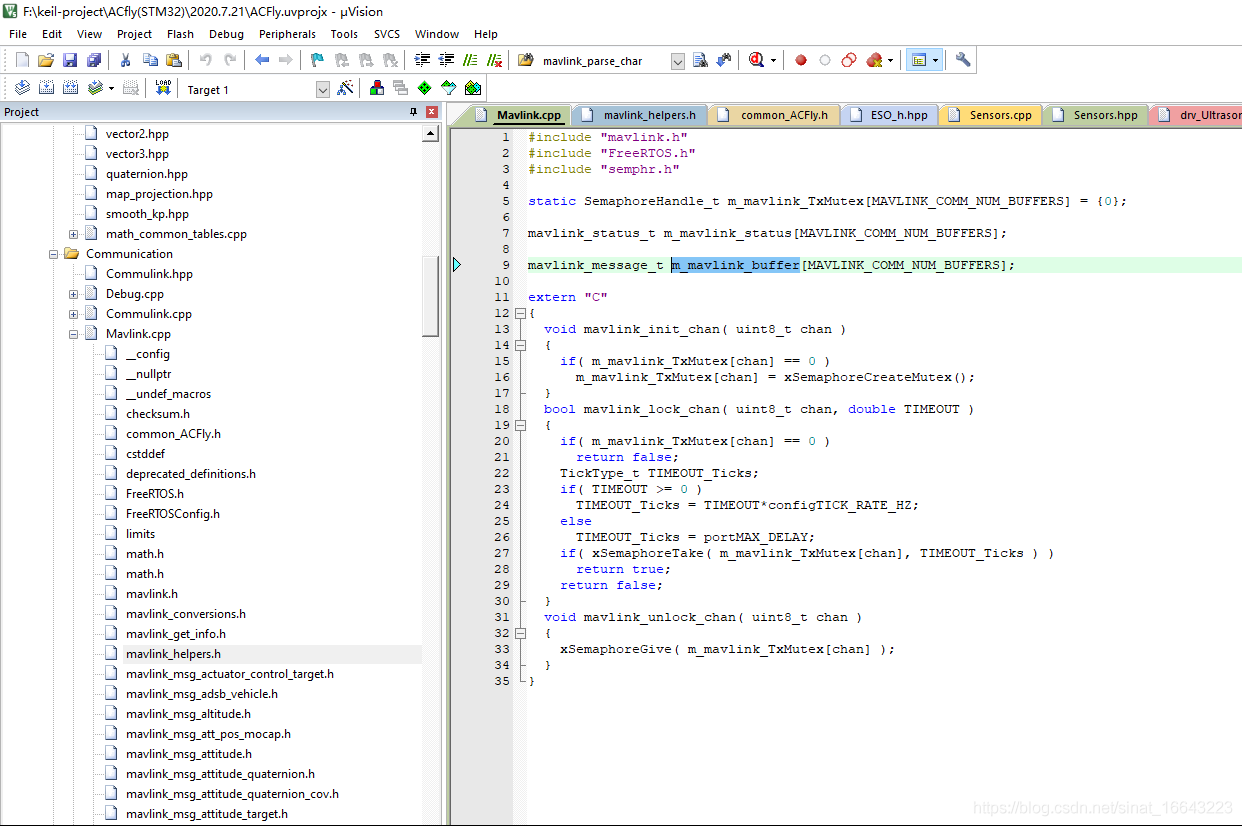
ACfly里面mavlink通信似乎也是一個單獨的任務,就在這個檔案里面,我似乎要加mavlink通信只需要在這加就可以了,不需要去main函式加,不需要去主檔案那include mavlink.h 而是在這個檔案里面呼叫API函式,埠什么的他應該定義好了我可以在這里面直接用,不需要折騰了,
是不是也就意味著其他任務是沒法直接獲得mavlink訊息的,通過任務間通信來弄,你也不需要在驅動里面去寫mavlink,
目前可以知道,每一個傳感器都會創建一個執行緒,我看了下單單uart驅動是沒有創建單獨執行緒的,uart驅動應該是在傳感器執行緒里面被呼叫的,
我覺得mavlink就可以理解為一個傳感器驅動,這個驅動它底層應該是呼叫串口驅動,mavlink本身應該只需要做些協議決議即可,應該不復雜,為什么看到寫這么多呢,應該幾個函式就可以搞定,
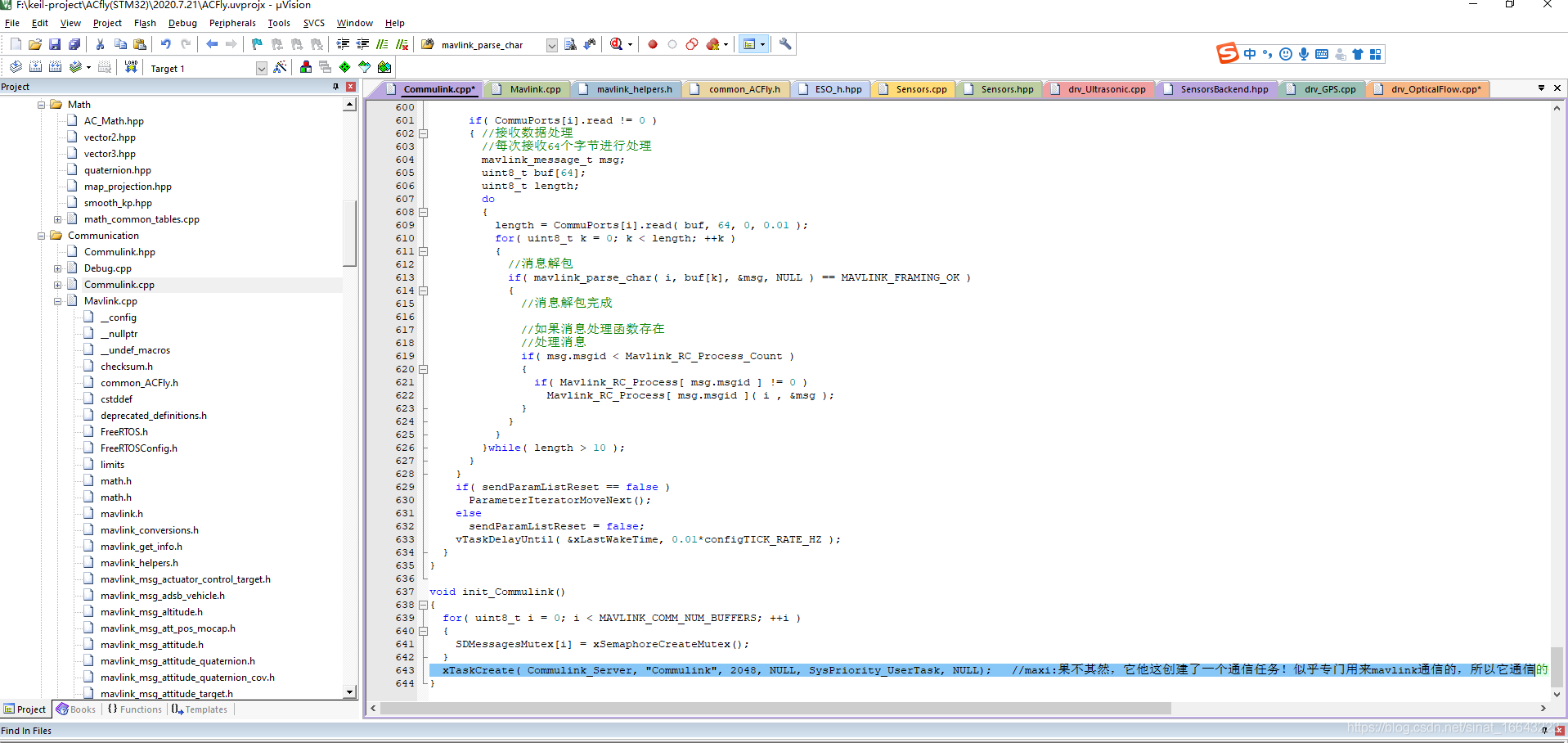
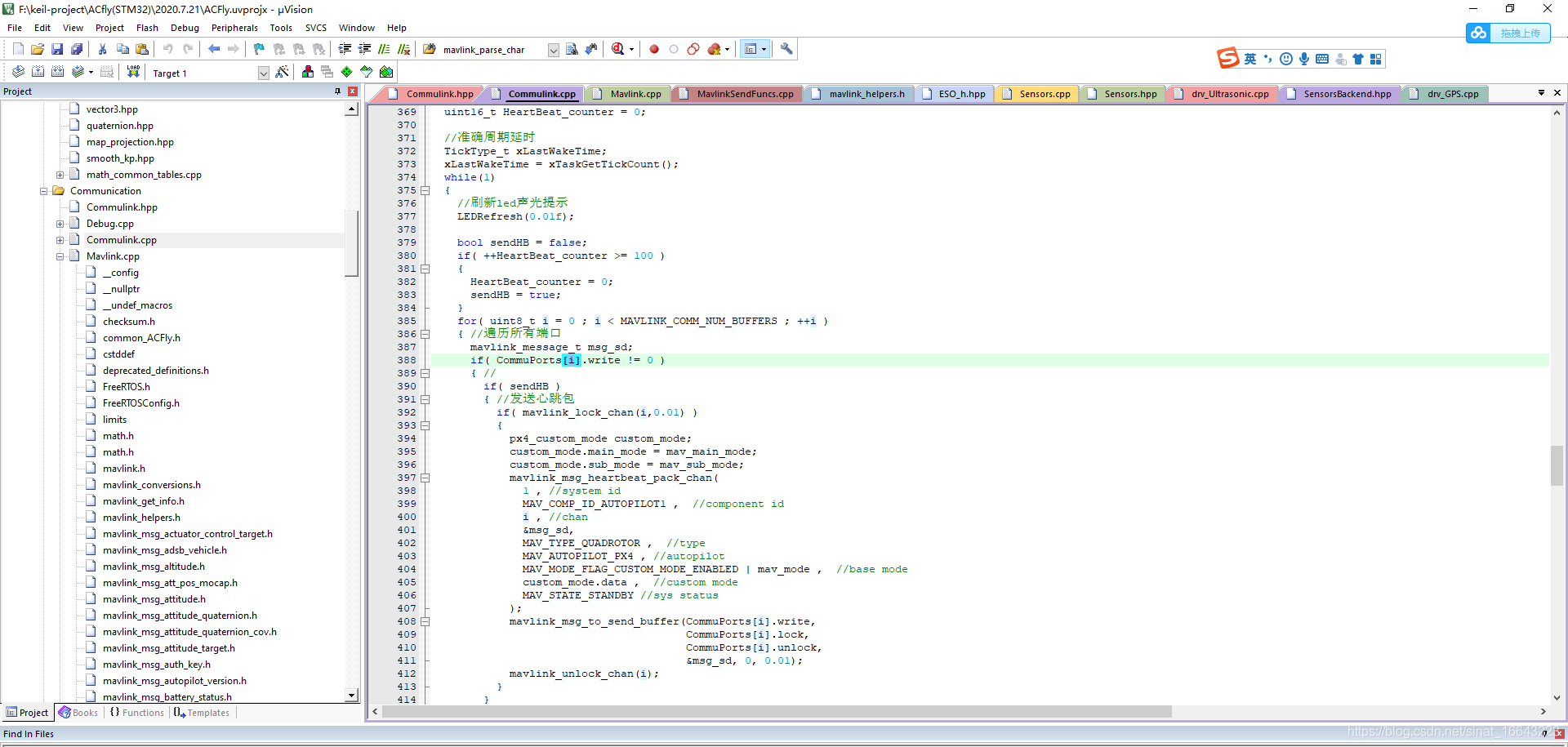
本身這個commulink.cpp(或者說這個任務)里面也有任務間通信的函式
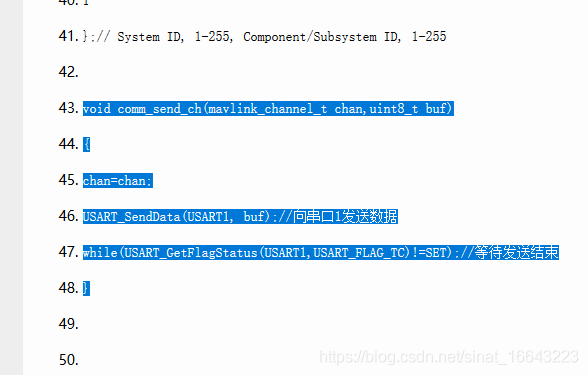
我在mavlink_helpers.h搜索uart有了新發下,就下面標為藍色的這段代碼,
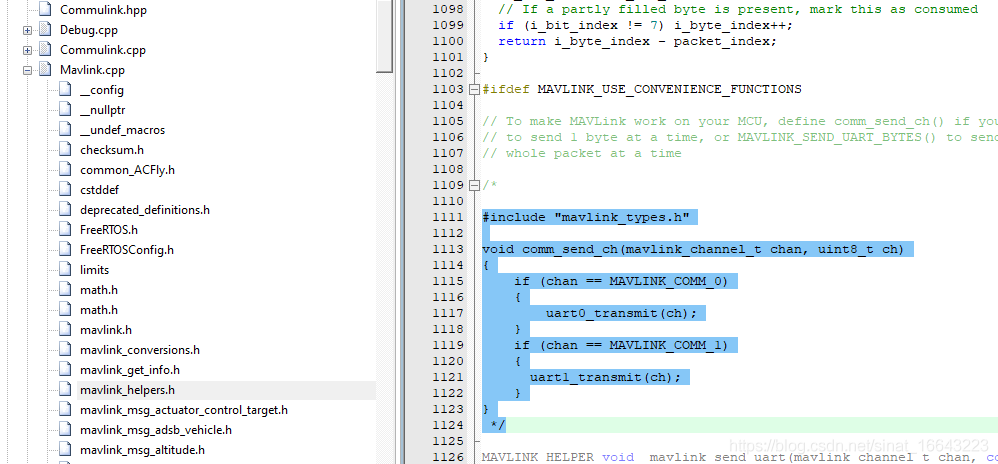
if (chan == MAVLINK_COMM_0)
{
uart0_transmit(ch);
}
if (chan == MAVLINK_COMM_1)
{
uart1_transmit(ch);
}
看到了吧,如果chan == MAVLINK_COMM_0 就呼叫 uart0_transmit(ch);這里真正把chan和具體的串口驅動函式關聯了起來!!!!!也是我之前想的它肯定會呼叫串口驅動函式的,可是我剛剛發現 uart0_transmit()這個函式在其他地方搜不到,也就是可能串口驅動里面沒這個函式,,
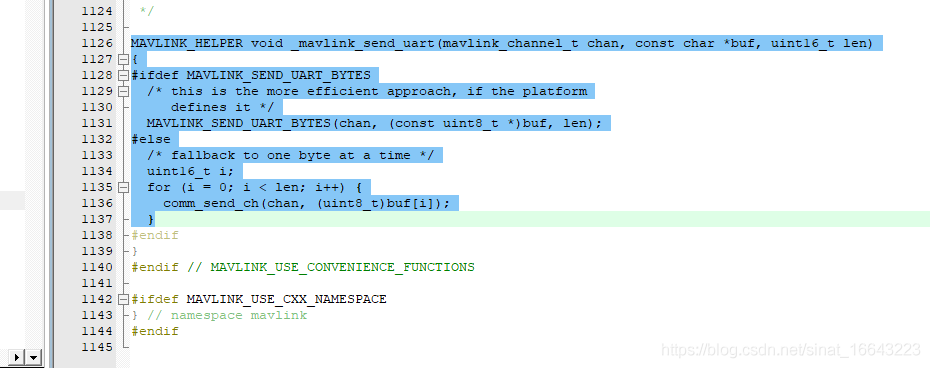
然后其他函式再呼叫這個函式 _mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len) 這個函式就是呼叫comm_send_ch(mavlink_channel_t chan, uint8_t ch) 實作的!!!!其他函式又大量呼叫_mavlink_send_uart(mavlink_channel_t chan, const char *buf, uint16_t len) 這個函式,這個可以通過搜索發現!!!!
我估計接收應該也有一個相應的函式
我這還發現一個mavlink_get_info.h的頭檔案,
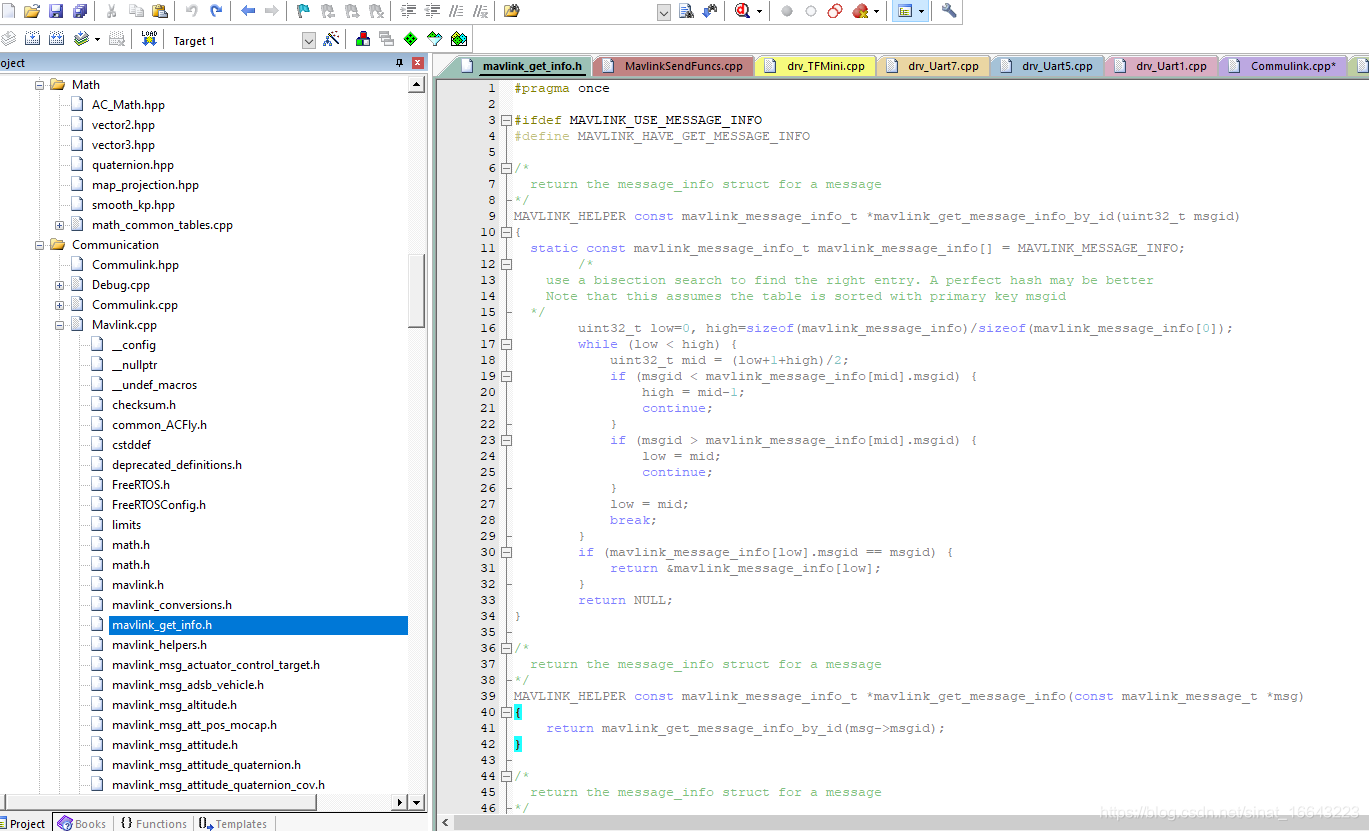
埠似乎就是個數字
我在網上下的別人寫好的mavlink收發代碼,chan那塊也是寫個數字0,就我下面標位藍色的地方,那是個發送函式的第一個引數,
代碼是在這里下載的
https://download.csdn.net/download/xiaoxilang/10396810
也是在這篇博文里發現的 https://blog.csdn.net/xiaoxilang/article/details/80221065?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522160180310019195188320690%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=160180310019195188320690&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~blog~first_rank_v1~rank_blog_v1-1-80221065.pc_v1_rank_blog_v1&utm_term=mavlink&spm=1018.2118.3001.4187
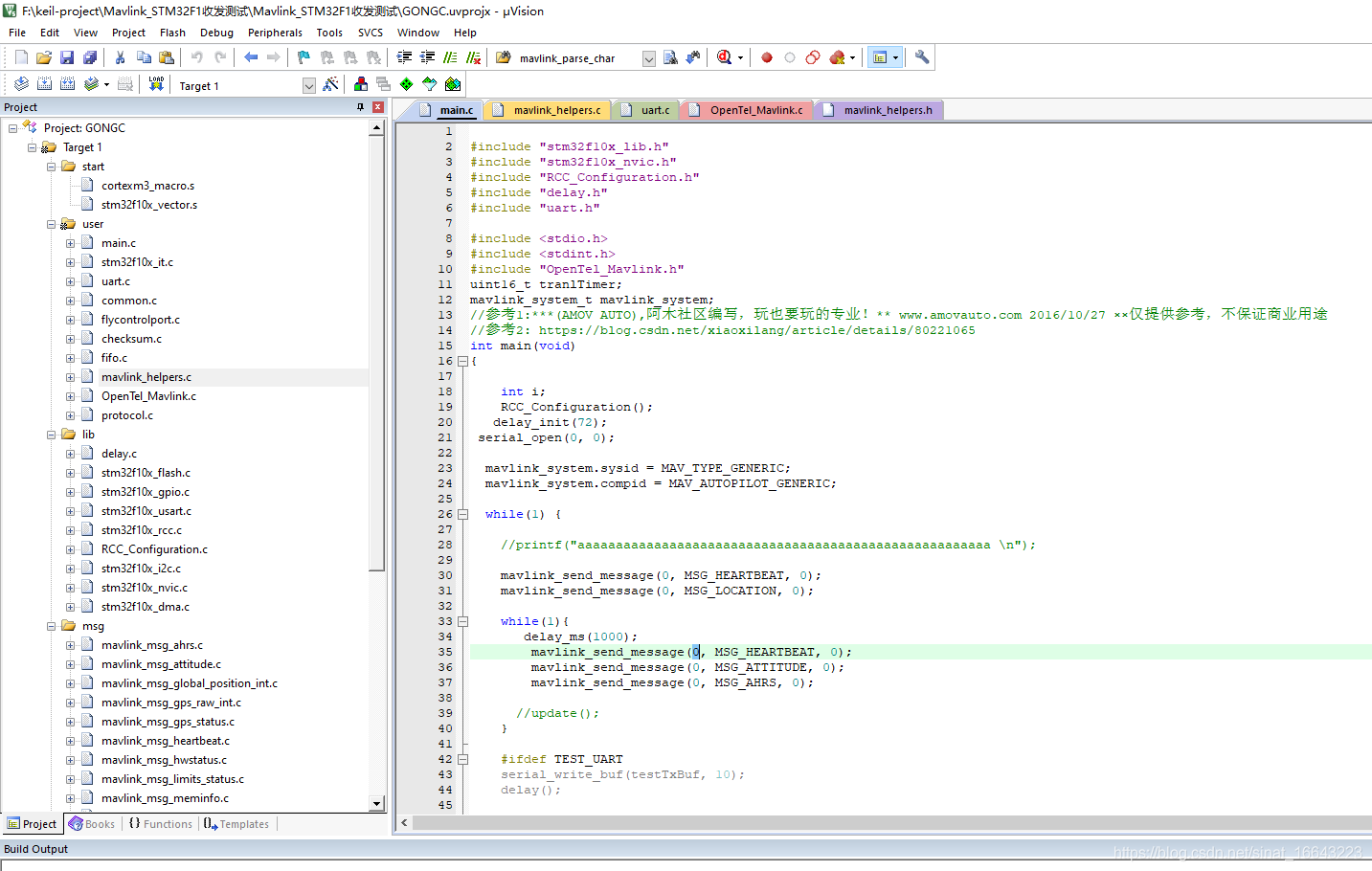 這個可不可以去試試深挖一下那個 serial_open(0,0) 看看能不能找出一些串口的線索,
這個可不可以去試試深挖一下那個 serial_open(0,0) 看看能不能找出一些串口的線索,
好像還看到需要自己轉成c檔案?然后好像沒有頭檔案查看函式定義的時候不好跳轉?


這里也說了要生成C代碼
https://blog.csdn.net/ybhuangfugui/article/details/82348876
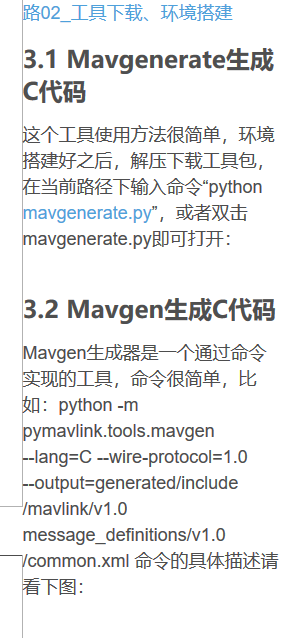
https://zhuanlan.zhihu.com/p/57695663

轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/157489.html
標籤:其他