rpg_trajectory_evaluation工具評估SLAM/VIO系統
1、安裝
系統環境:ubuntu18.04 +ROS melodic
代碼:https://github.com/uzh-rpg/rpg_trajectory_evaluation
tutorial:http://rpg.ifi.uzh.ch/docs/IROS18_Zhang.pdf
1.1 首先安裝依賴的python庫
pip install numpy
pip install matplotlib
pip install colorama
pip install ruamel.yaml
1.2 編譯代碼
mkdir catkin_ws
cd catkin_ws
mkdir src
cd src
git clone https://github.com/uzh-rpg/rpg_trajectory_evaluation.git
git clone https://github.com/catkin/catkin_simple.git
cd ..
catkin_make
1.3 遇到問題
OSError: [Errno 2] No such file or directory: 'latex'
安裝
sudo apt install texlive-fonts-recommended texlive-fonts-extra
sudo apt install dvipng

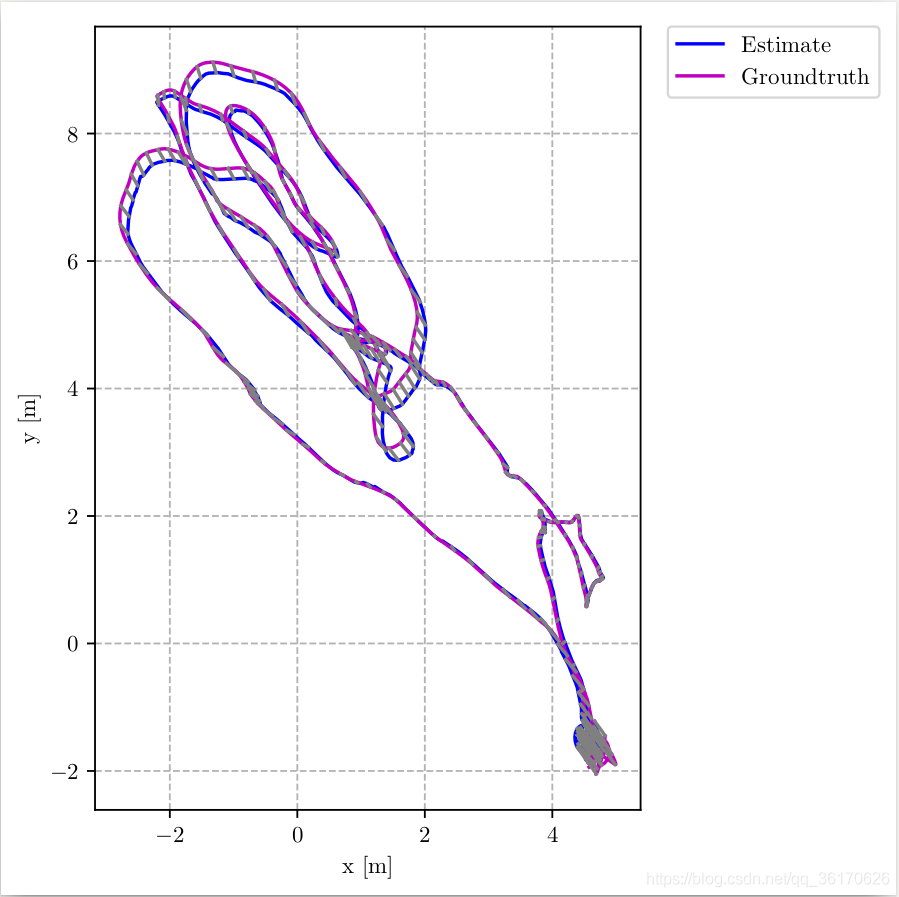
結果保存在plots中和saved_results中,具體圖片在plots中以pdf的形式輸出
1.4 結果
生成相對平移誤差、旋轉誤差、尺度誤差、軌跡、平移誤差
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/159717.html
標籤:其他
上一篇:代碼學習——MLDF