buck電路matlab仿真及其PID控制器引數調整
-
主電路搭建
-
引數設定
-
buck電路傳遞函式辨識
-
matlab pid-tuner進行pid控制器引數調整,將調整好的PI引數更新到buck電路控制器中
一.主電路搭建:
1.buck電路組成:電感、電容、開關器件、同步整流可以不用二極管
主電路:
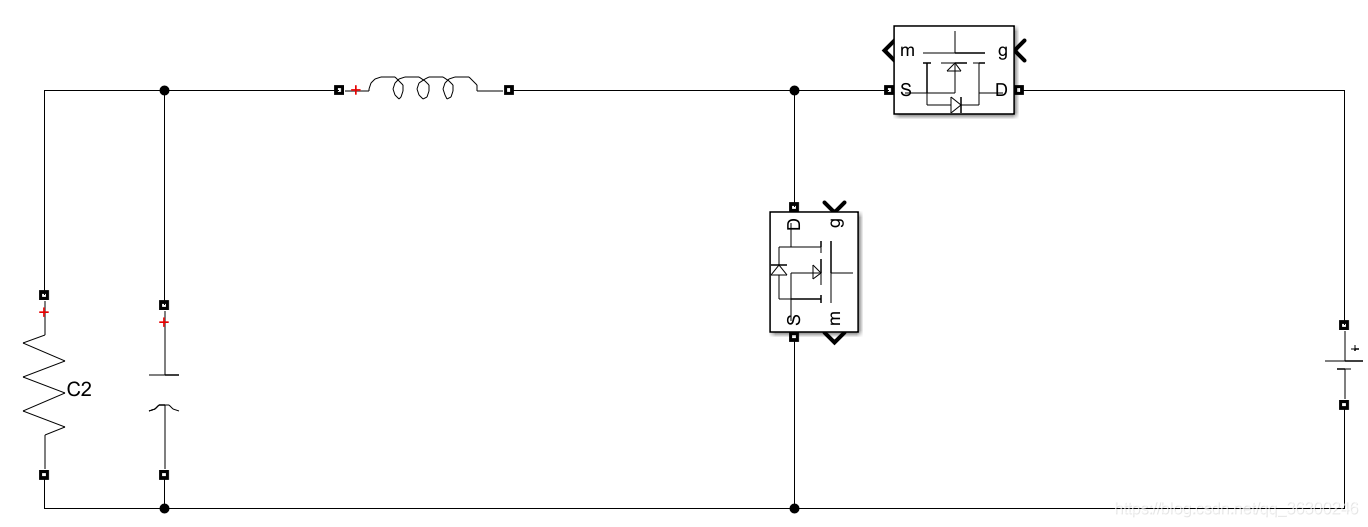
電感值:85e-6h,電容值:30e-4,電阻:4
2.添加控制模塊,測量模塊:
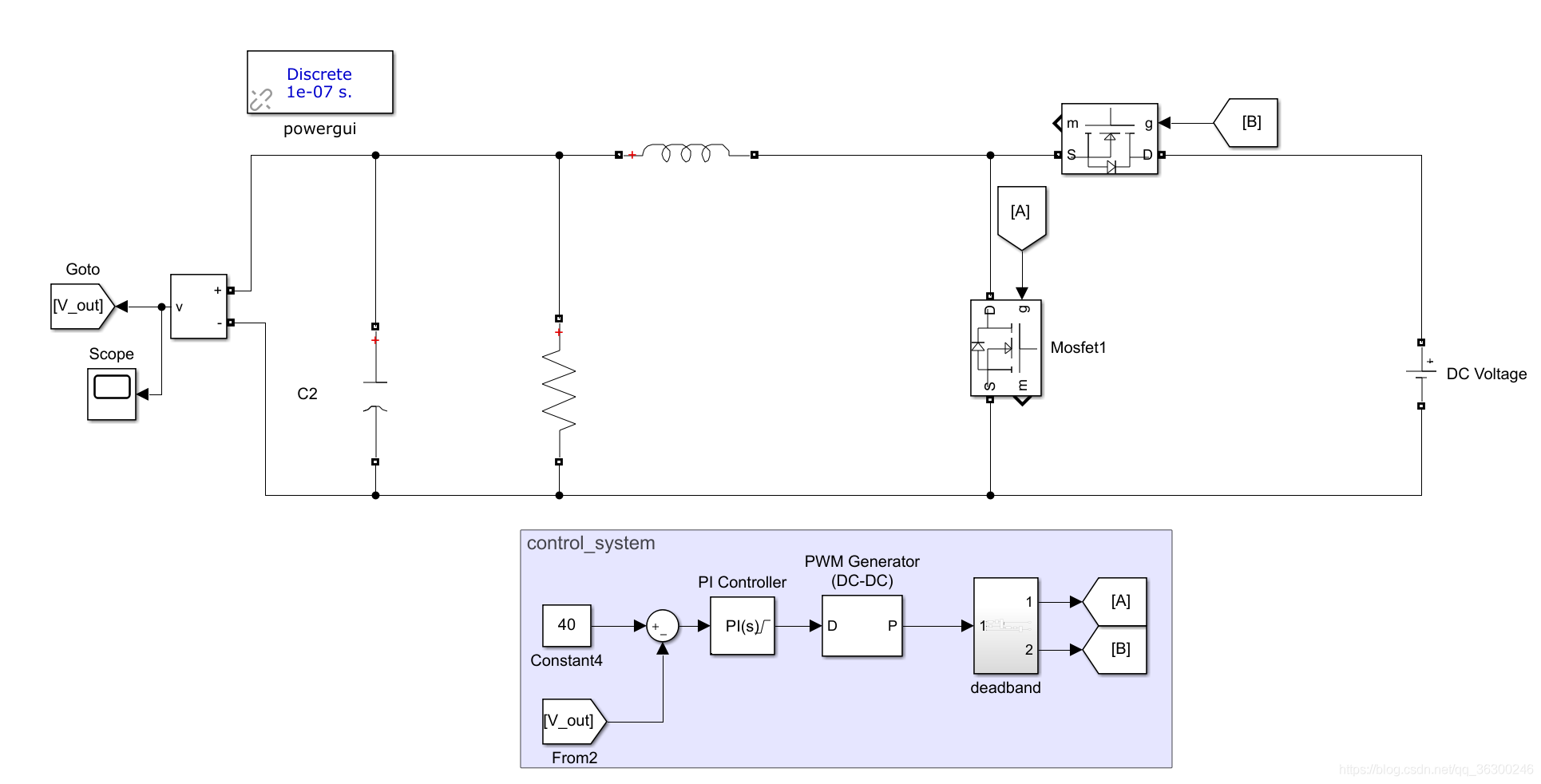
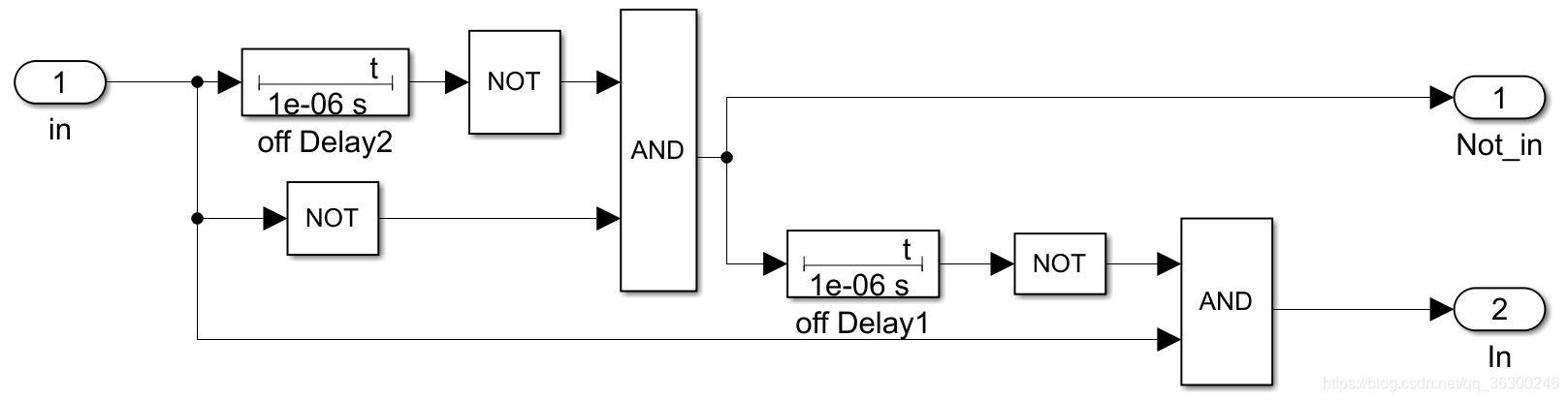
死區模塊的搭建:
小技巧:1.在模型中使用Goto、From模塊可以減少信號線的使用,使模型看起來更加整潔,
2.PWM Generator模塊可以直接生成PWM波,D的范圍0-1,
3.死區模塊的搭建可以通過下降沿延時模塊和邏輯操作模塊的組合實作,
二、buck電路的傳遞函式辨識
2.1獲取輸入及其對應的輸出輸出:
在PID控制器輸出端接上、以及測量電壓模塊輸出端分別接上to workspace模塊將資料匯入到maltab作業空間為后面使用系統辨識工具箱提供辨識資料:
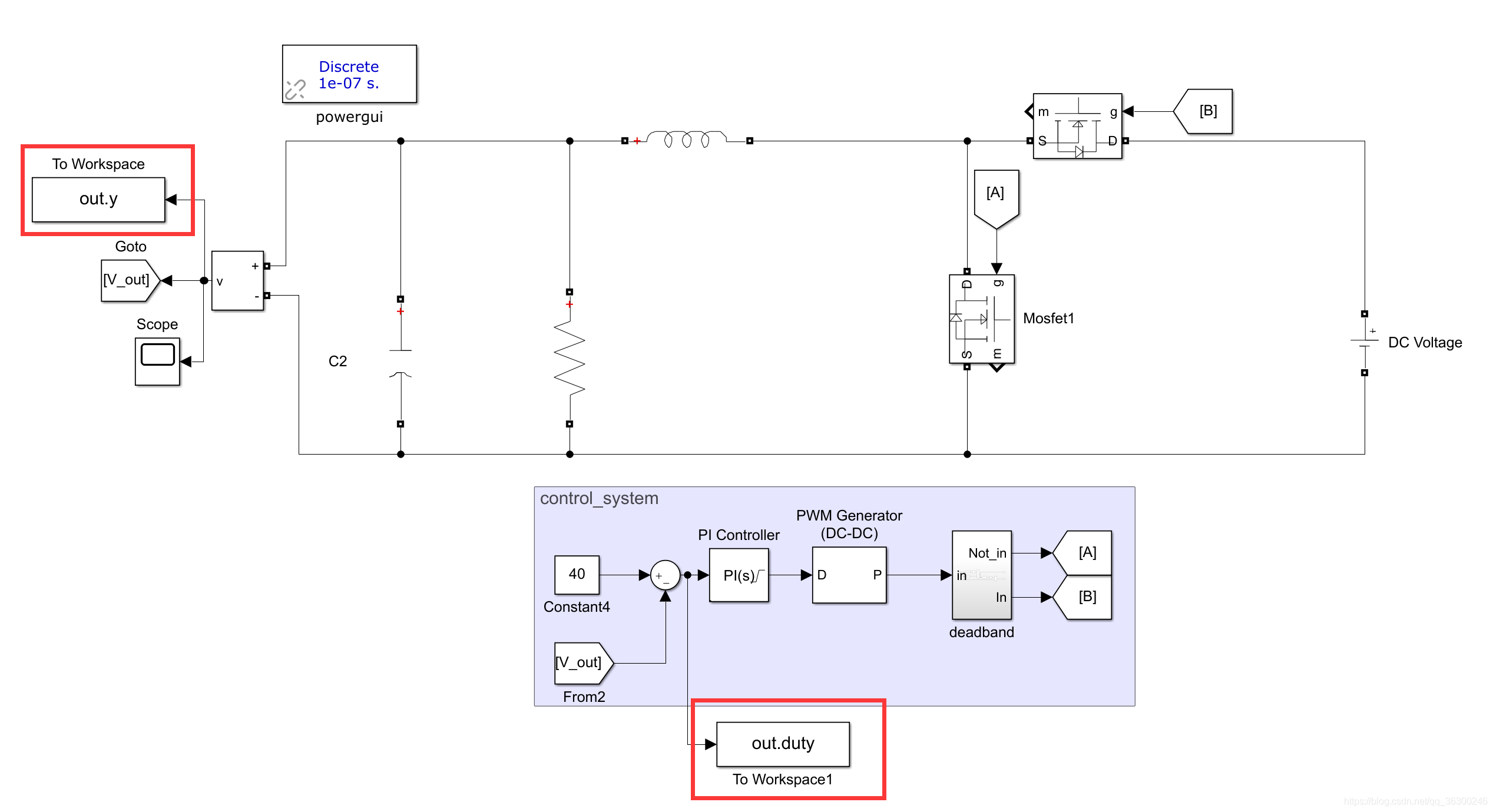
雙擊這兩個模塊可以修改模塊名以及資料形式:
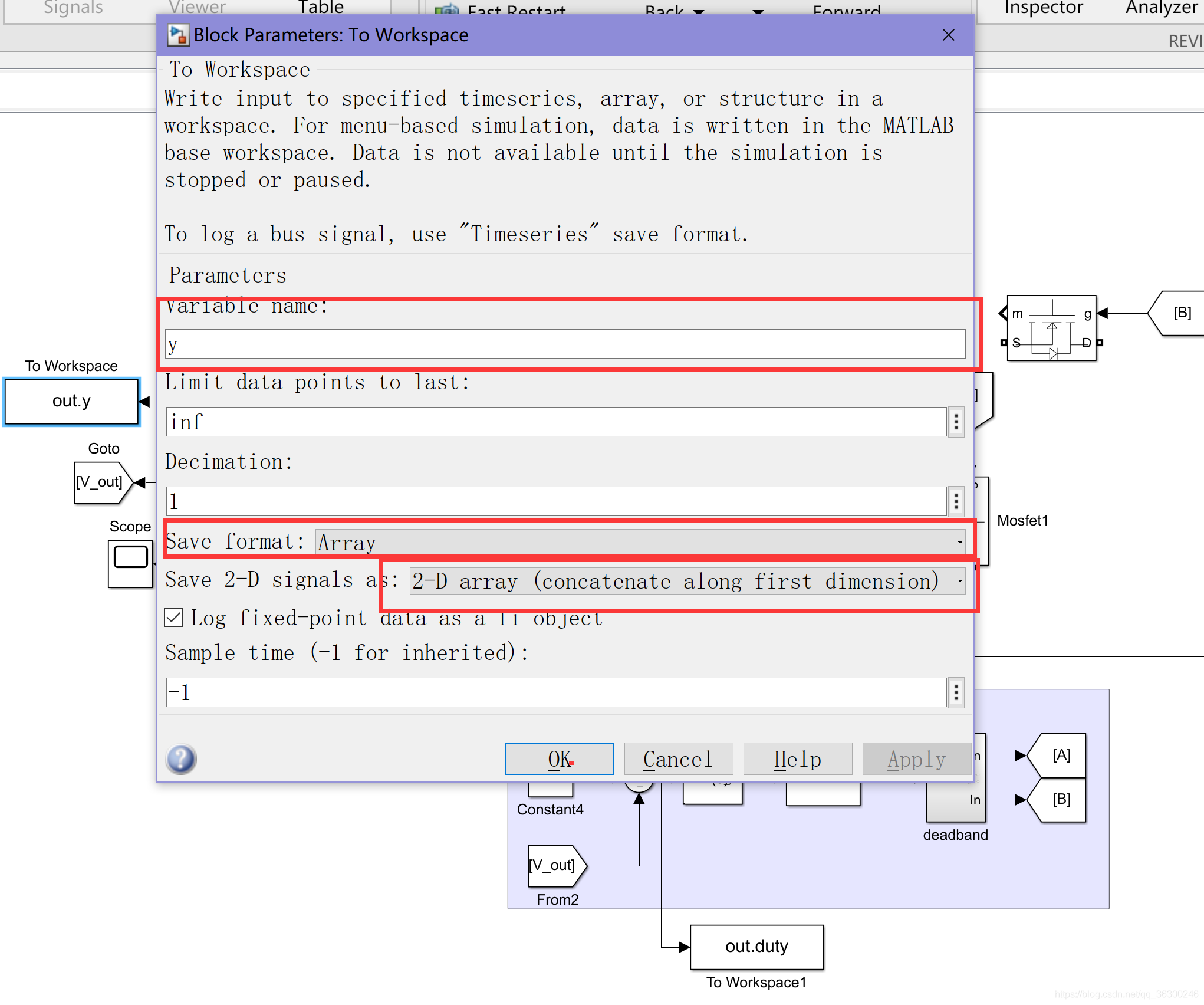
2.1運行模型(仿真時間0.0幾足夠了)得到占空比以及其對應的輸出電壓資料:(為了得到原始資料,可以先隨便給PI控制器一個PI引數[不要太離譜!])

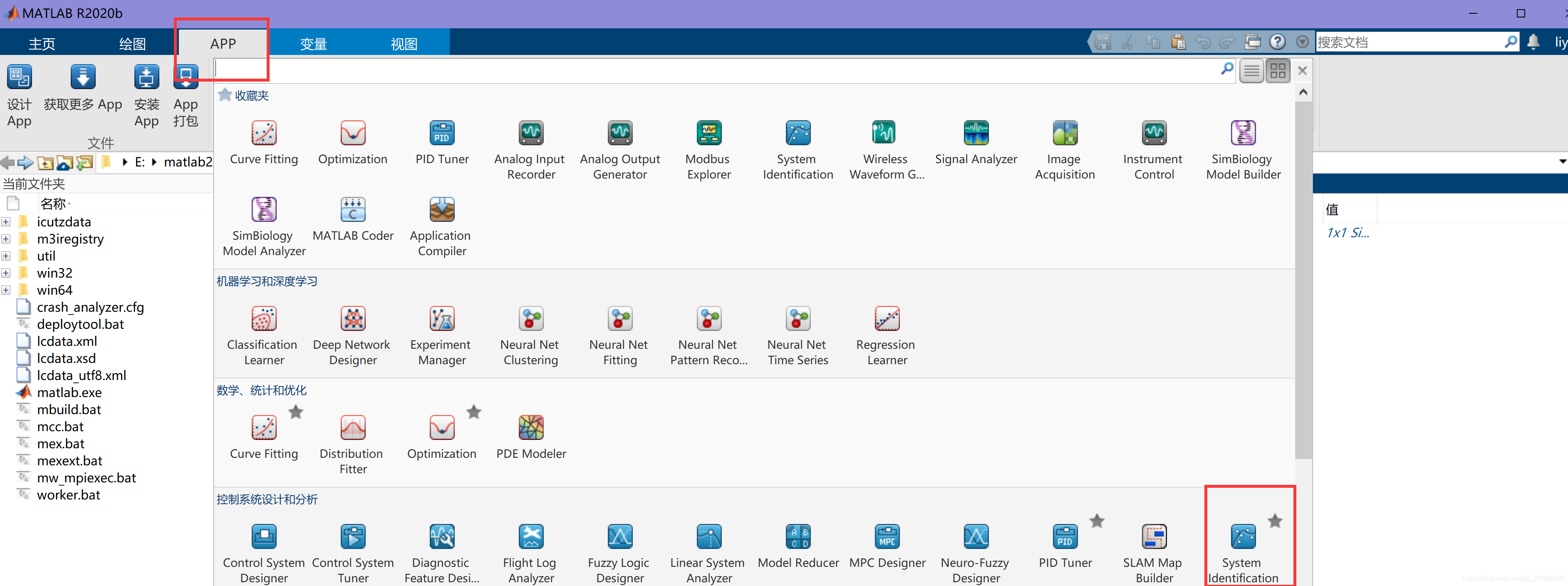
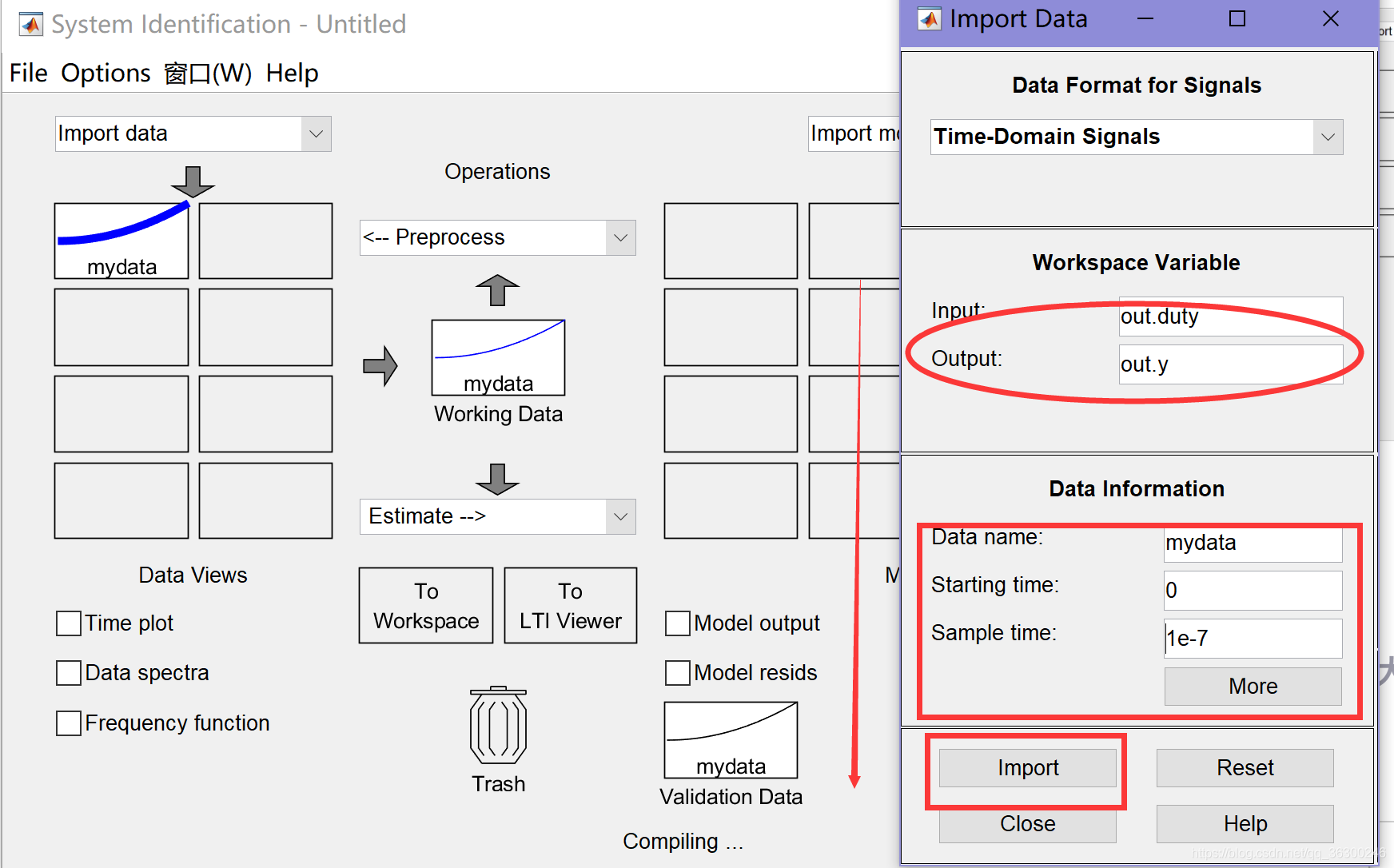
2.2打開系統辨識工具箱:
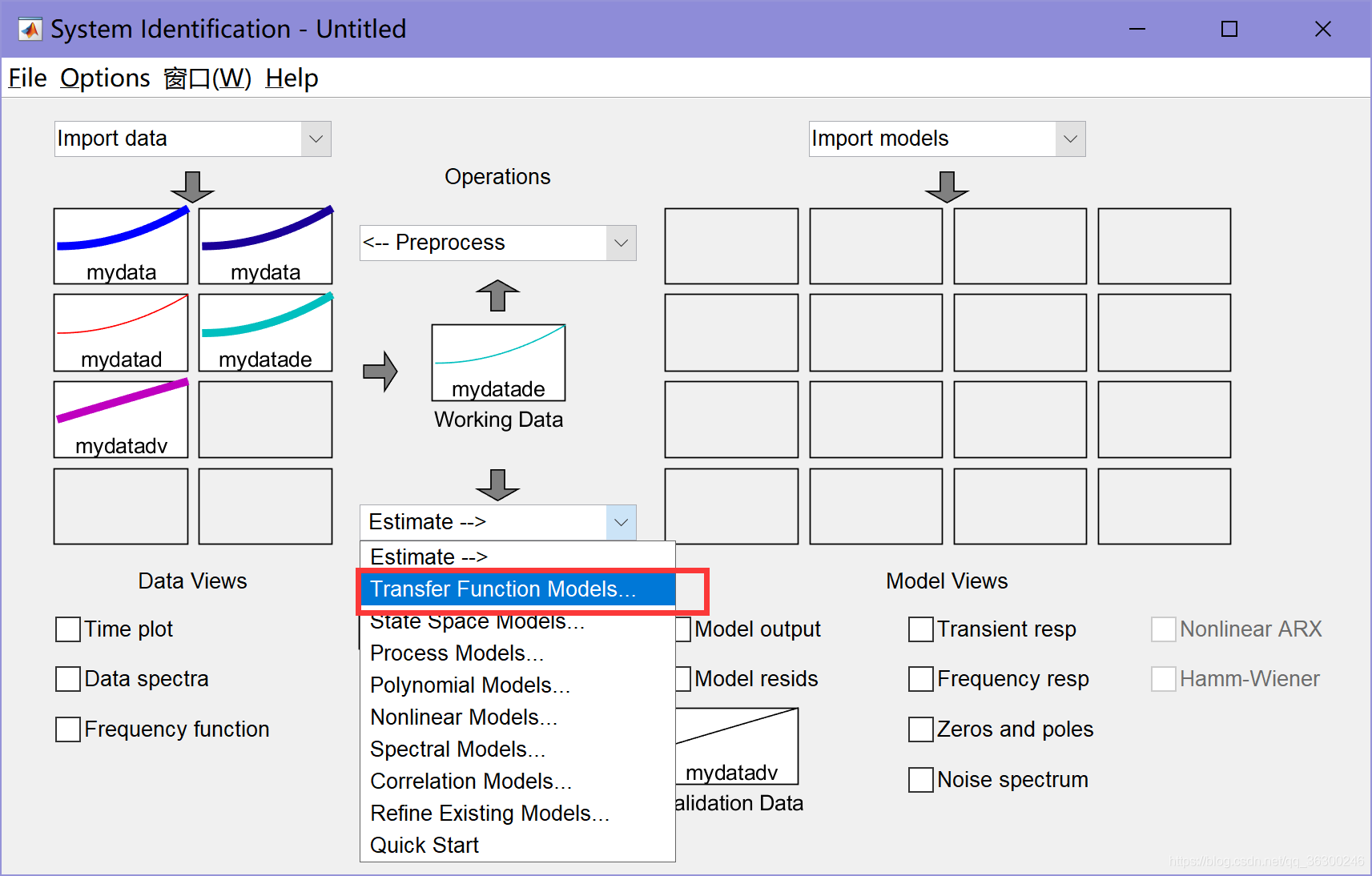
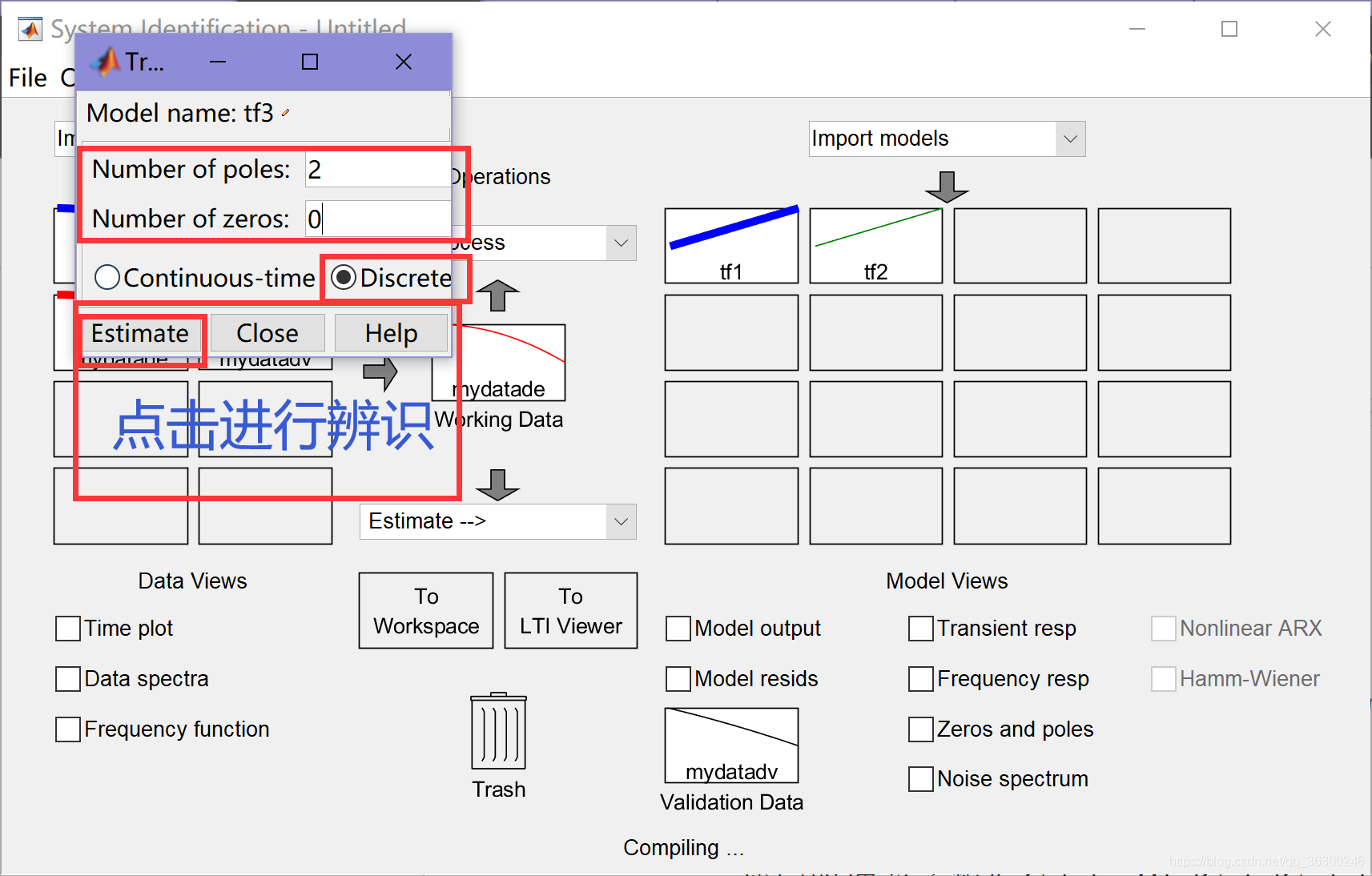
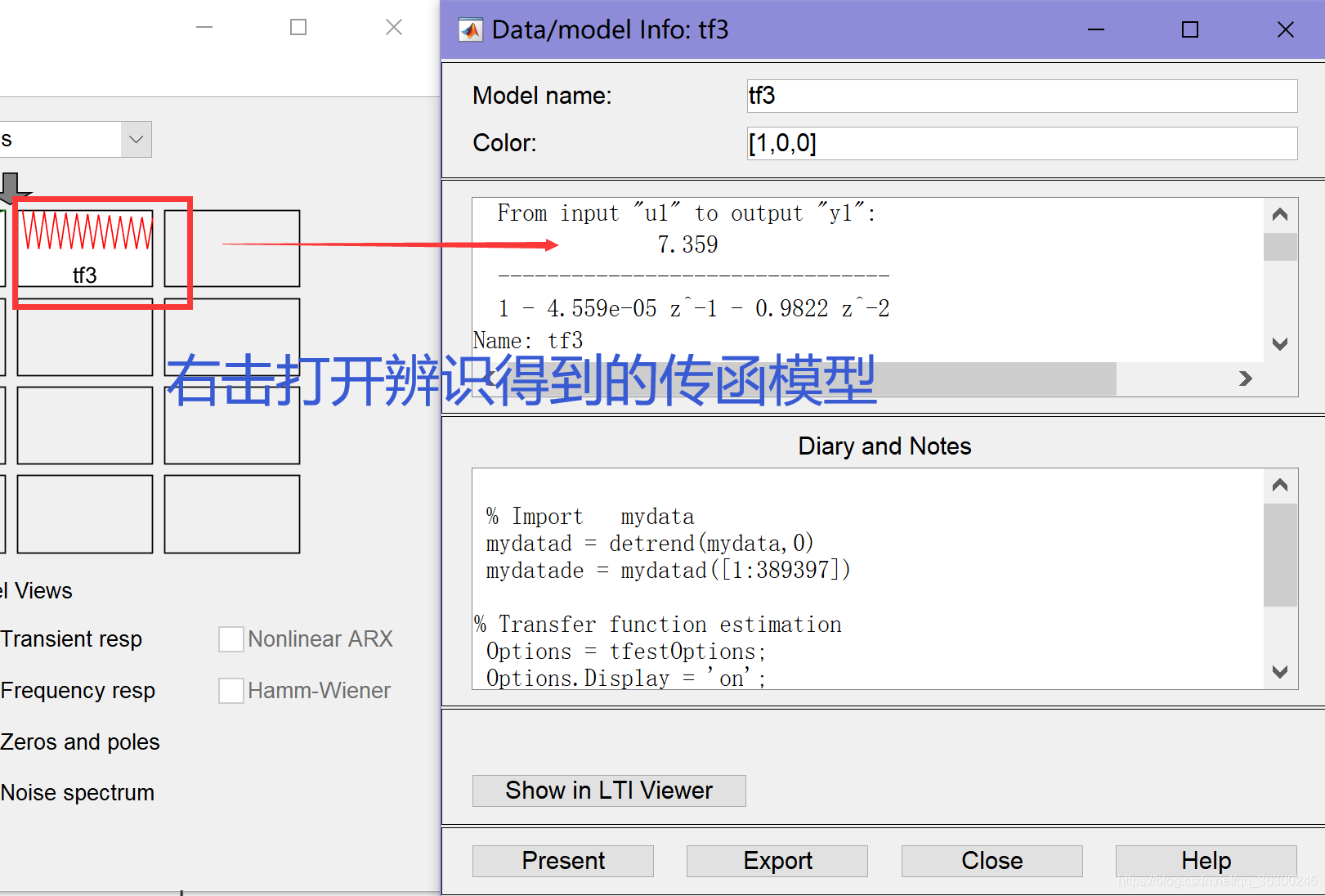
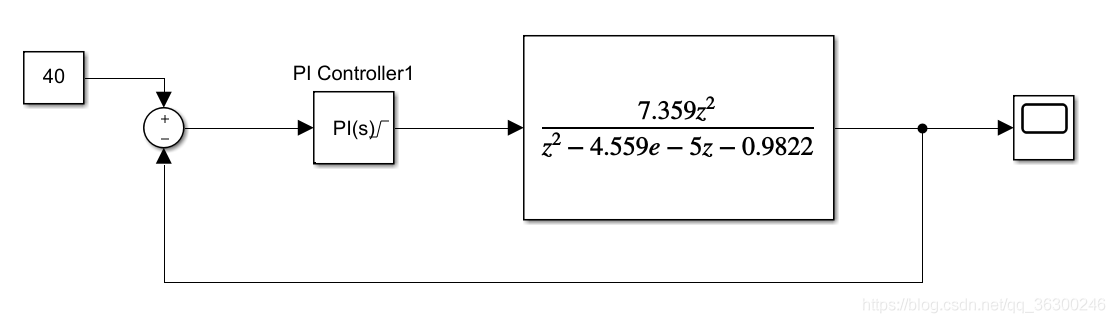
2.3對得到的傳遞函式在simulink中利用pid-tuner進行PID控制器引數調整:
2.3.1搭建辨識得到的buck電路的傳遞函式對應的控制系統:
2.3.2雙擊PI控制器打開點擊選項tuner:
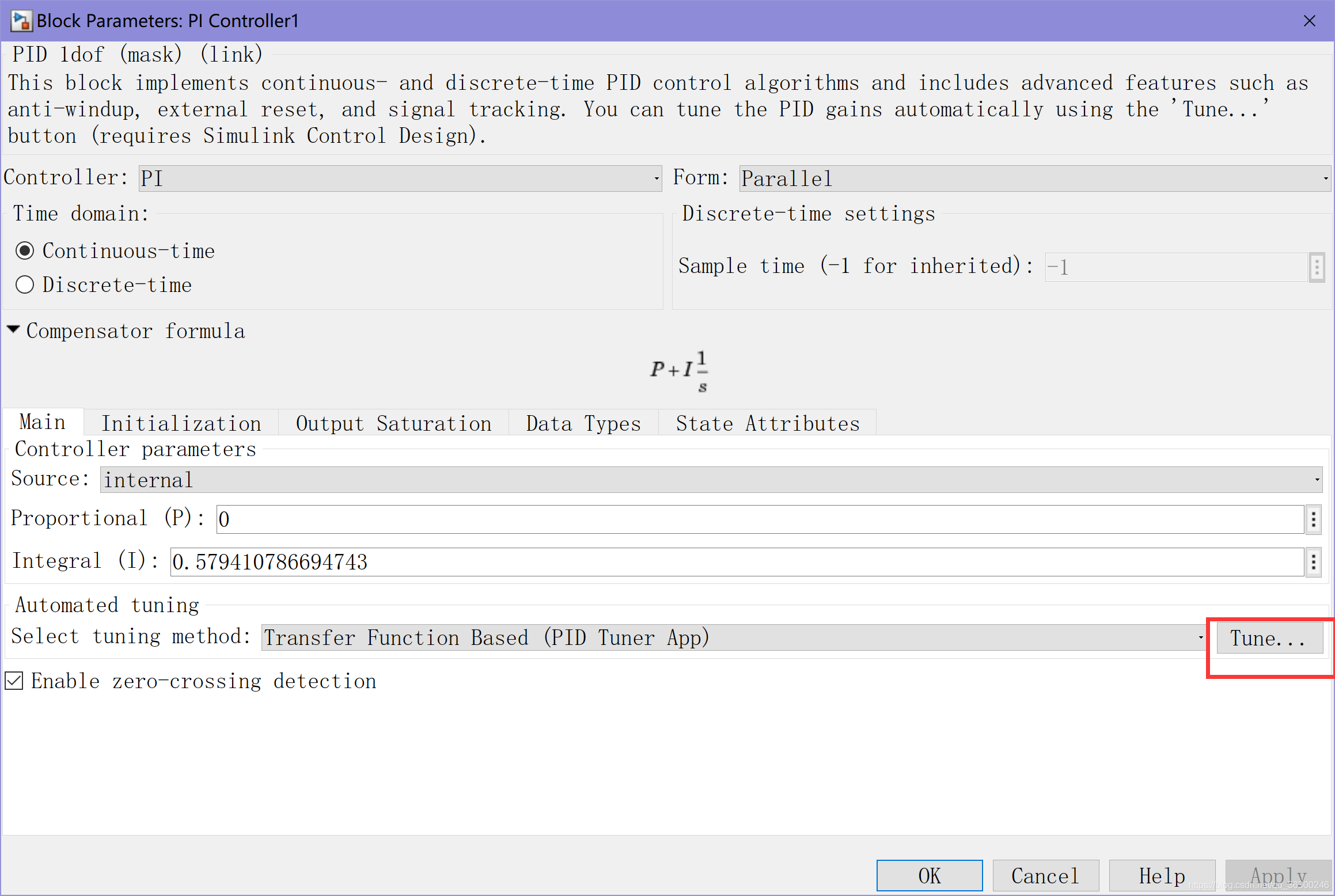
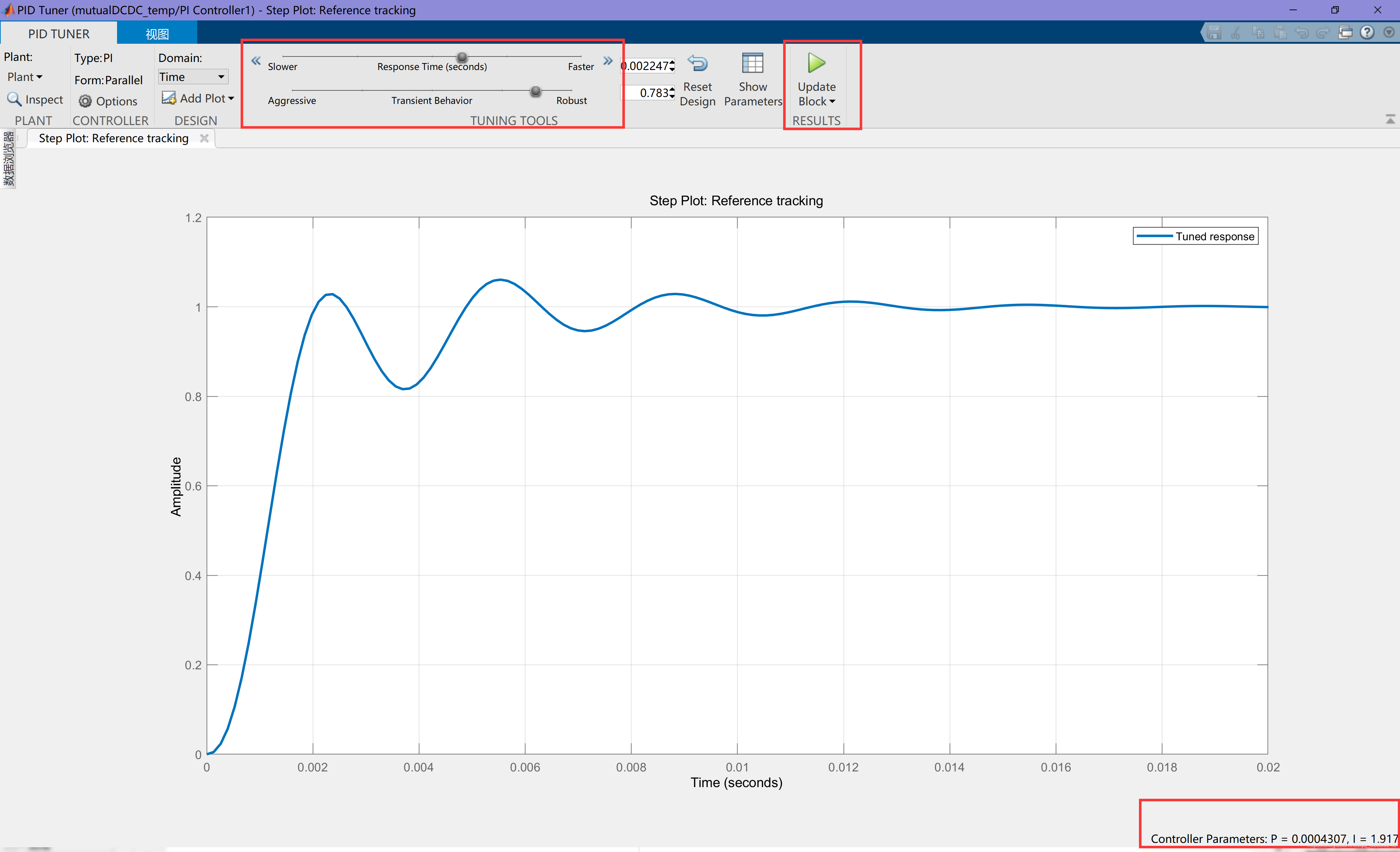
滑動上面的兩個畫塊可以分別調節控制器回應速度以及魯棒性,右下方是對應的PI引數,
2.3.3滑動滑塊調整控制器性能得到:
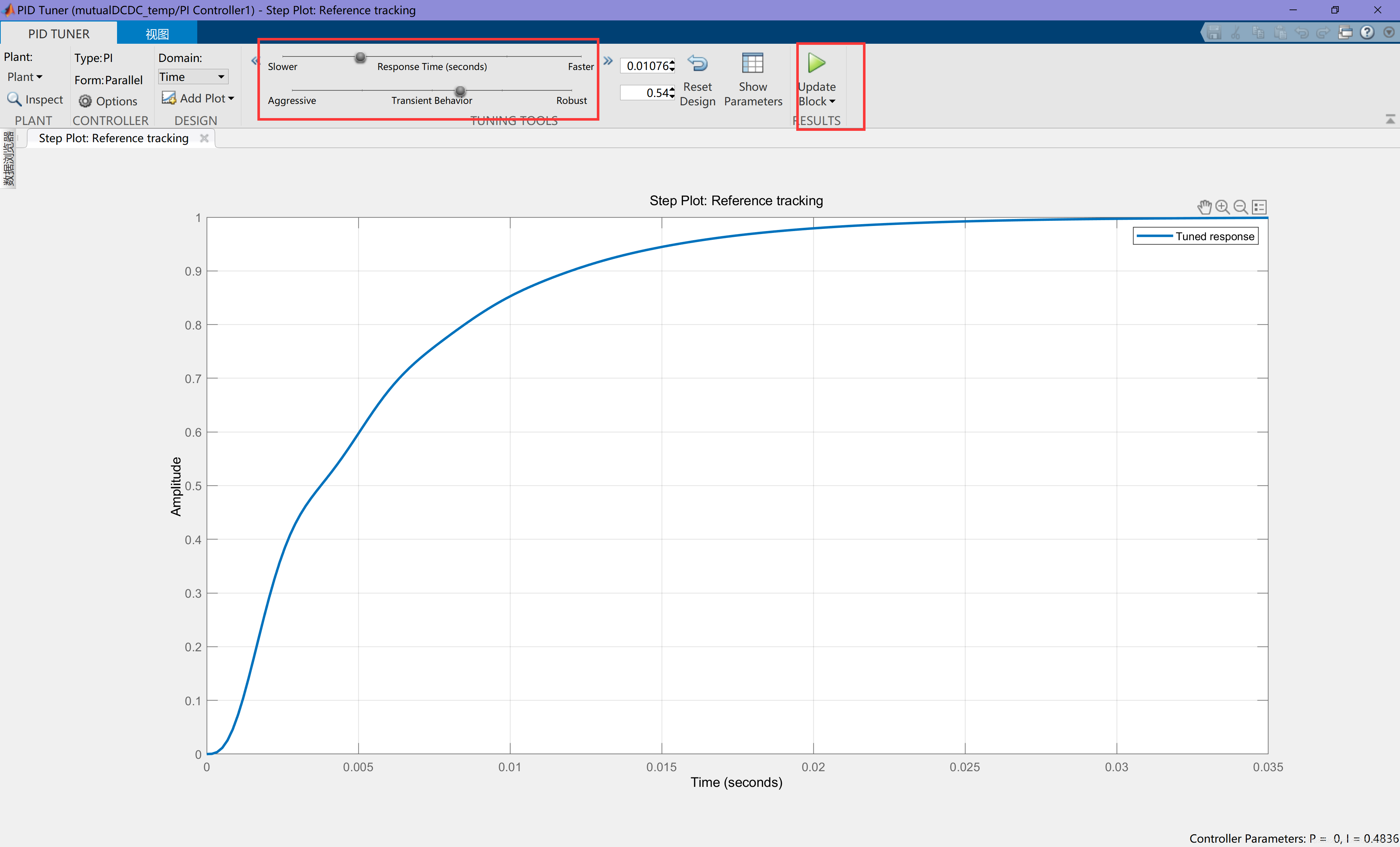
對應下的的傳函系統輸出:

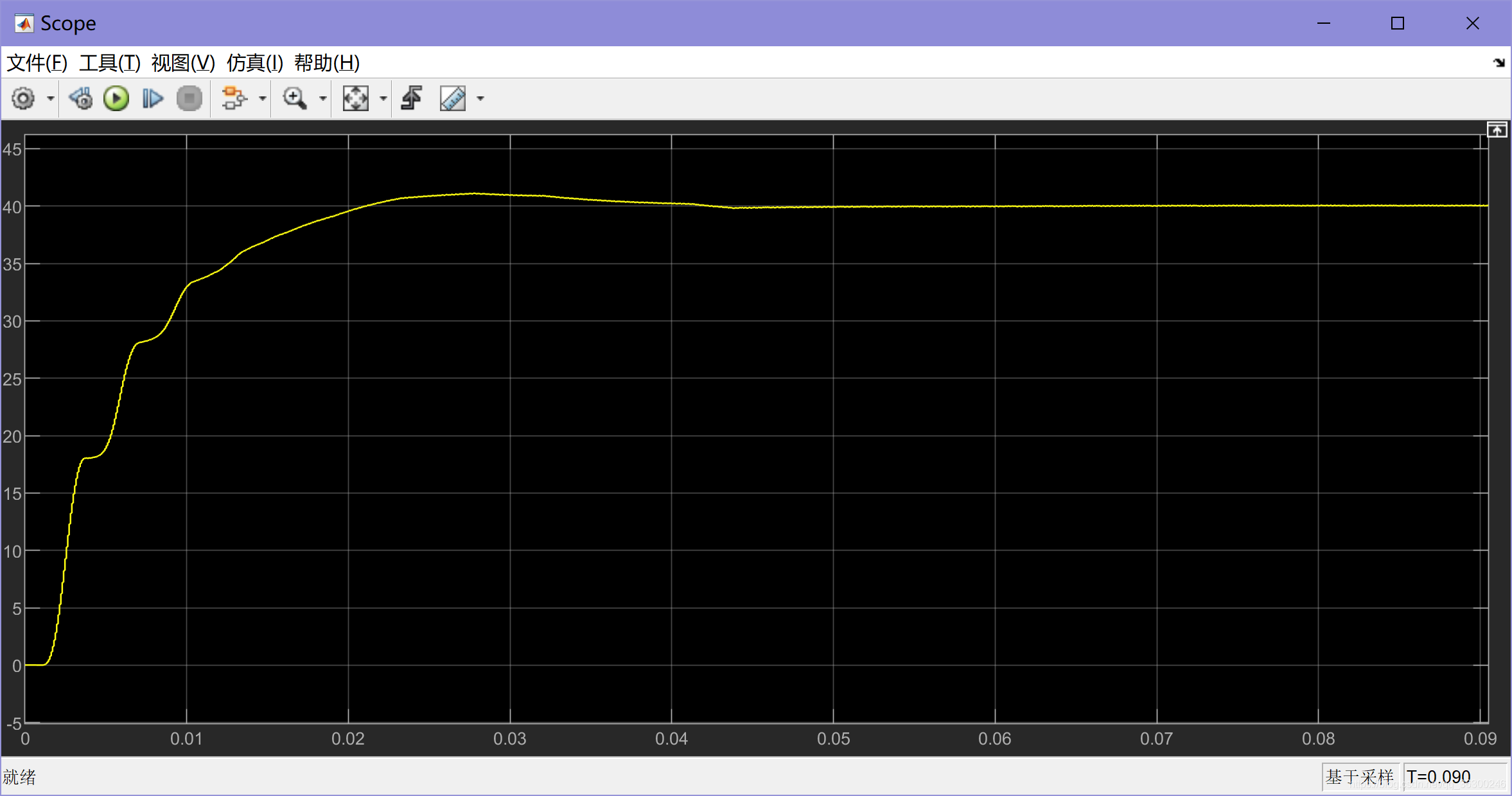
將該PI引數修改到buck電路控制器中去得到buck電路輸出電壓回應:
小技巧:由于PI的初始值可能與較好的PI引數相差太大,得到的辨識不夠模型,因此我們可以通過這次得到資料再次進行系統辨識,重復上面的操作,
提示:這里對文章進行總結:
例如:以上就是今天要講的內容,本文僅僅簡單介紹了pandas的使用,而pandas提供了大量能使我們快速便捷地處理資料的函式和方法,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/182902.html
標籤:其他
上一篇:【單片機學習】第一課:課程介紹
下一篇:2020年TI杯大學生電子設計大賽 無線運動傳感器節點 作品開源( PCB、設備/服務器工程、檔案、測驗視頻、設計報告)