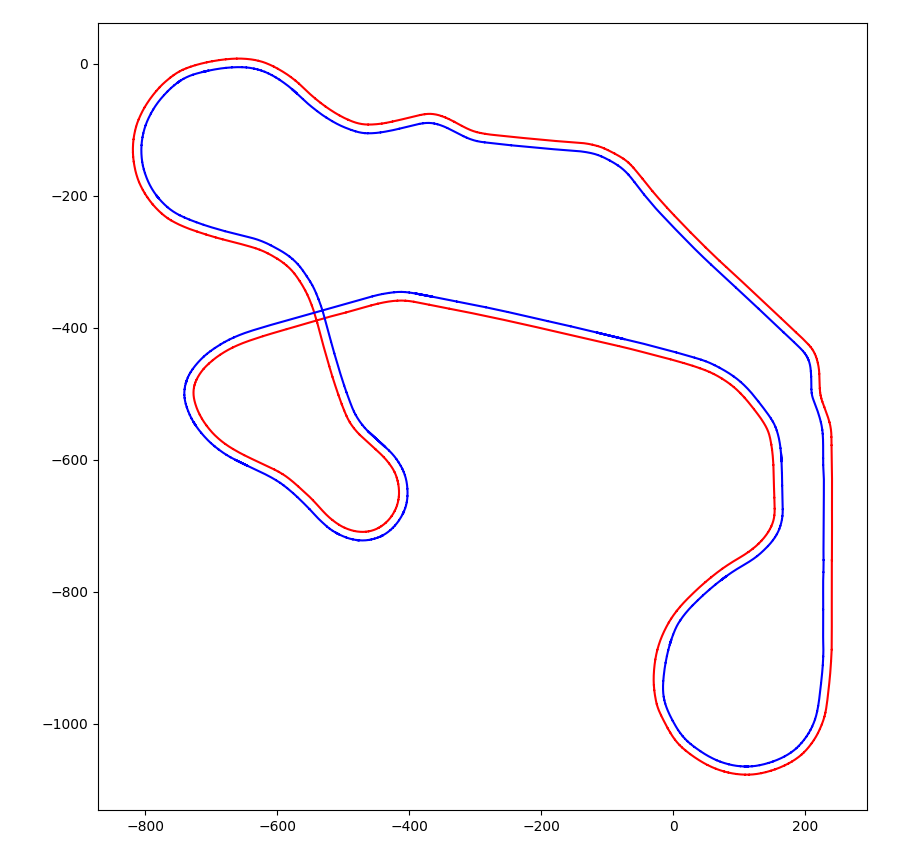
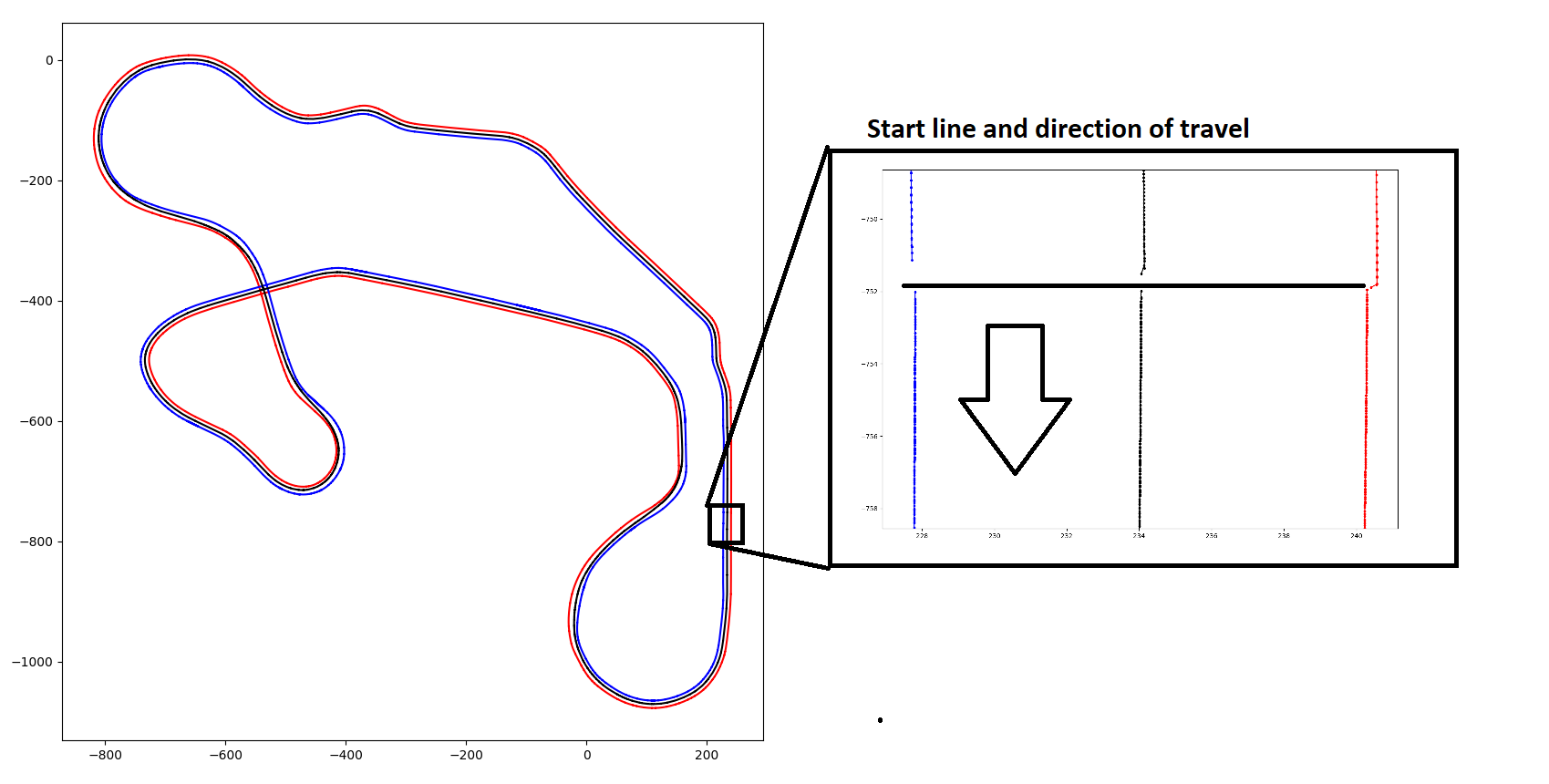
假設我有兩個閉合的環路,在二維x、y空間中代表一個賽道的邊界。每個環路的起點如果用一條線連接,將代表起點/終點線,這條線的中點將代表賽道的中心線。
從起跑線向外移動,每個回圈都由線段組成,這些線段的長度是隨機的,變化相對較小。每個環路的線段數量較多,約為20-40K。
考慮到這一點,我試圖解決的問題是找到一個代表其他兩個回圈的中線的封閉回圈(即--軌道的中心線)。
起初我認為,鑒于每條小線段的長度相對接近,我可以采取一個長度為一段的步驟,該步驟是兩個環路中較小的一段,這個較短的長度被用來通知沿長線段的一個點,然后在兩個長度相等的步驟之間找到一個中點。沿著每條線的新位置被更新,并且這個程序重復進行,有效地在具有較短步驟的活動回圈之間來回切換。
我正在 python 中進行這項作業,我有一個包含兩個回圈的 X 和 Y 位置(x = *.PositionX 和 y = *.PositionZ)的 csv 檔案。以下是我試圖使用的內容,供參考
。import traceback
import pandas as pd
import numpy as np
from matplotlib import pyplot as plt
fDict = {"Bernese Alps":{"fName":"2021-09-12202910_FM7_DASH","left"。 4,"right":6},
"Maple Valley":{"fName":"2021-08-30171416_FM7_DASH", "left": 4,"right":1},}
track = "Maple Valley"。
df = pd.read_csv(fDict[track]["fName"/span>] ".csv")
#對應于賽道左右極限的圈數。
lapRight = fDict[track]["right"]
lapLeft = fDict[track]["left"]
#Position from history for right and left>
rightPos = df.loc[df.LapNumber==lapRight,['PositionX','PositionZ']]
leftPos = df.loc[df.LapNumber==lapLeft,['PositionX','PositionZ']]
#Vector difference from one position to the next both right and left]。
rightDiff = rightPos.diff()
rightDiff.iloc[0] = rightPos.iloc[0] -rightPos.iloc[-1]
leftDiff = leftPos.diff()
leftDiff.iloc[0] = leftPos.iloc[0]-leftPos.iloc[-1]
#Vector difference magnitudes one position to the next both right and left[/span
rightDiffMag = (rightDiff.PositionX.copy()*0 np.linalg.norm(rightDiff,axis=1)。 rename({'PositionX':'PositionMag'})
leftDiffMag = (leftDiff.PositionX.copy()*0 np.linalg.norm(leftDiff,axis=1) 。) rename({'PositionX':'PositionMag'})
#Normalized vectors to project to
rightDiffNormed = rightDiff.div(rightDiffMag,'index')
leftDiffNormed = leftDiff.div(leftDiffMag,'index')
#Methods to find center point尋找中心點的方法
#(原本使用x和y的平均值,但為了確認我沒有做錯而改變)。
def right_to_left(rightX, rightZ, leftX, leftZ)。
rtl_diff = np.array([leftX-rightX,leftZ-rightZ])
rtl_mag = np.sqrt(sum(rtl_diff**2)
rtl_dir = rtl_diff/rtl_mag
return rtl_dir,rtl_mag
def midPoint(rightX,rightZ, leftX, leftZ)。
rtl_dir, rtl_mag = right_to_left(rightX,rightZ,leftX,leftZ)
mid_vec = rtl_dir*rtl_mag*.5。
return rightX mid_vec[0], rightZ mid_vec[1]
#創建新的右、左和中線容器。
rights = [[rightPos.iloc[0].values[0]], [rightPos.iloc[0].values[1] ]
lefts = [[leftPos.iloc[0].values[0]], [leftPos.iloc[0].values[1] ]]
midP = midPoint(rights[0][0],rights[1][0] 。 lefts[0][0],lefts[1][0] )
mids = [[midP[0]],[midP[1] ]
#Initialize which size is longer].
#Initialize partial remainders from prior step
partials = {'left':0.0,'right':0.0}。
#Initialize indicie tracking for each side。
indicies = {'left':1,'right':1}。
print(len(leftPos),len(rightPos))
key = input("PAUSED - 'Y' TO CONTINUE 'N' TO ABORT: ")
if key.lower() == 'y':
Done = False: 完成 = False.
try:
while not Done。
rightIdx = rightPos.index[indicies['right']]
leftIdx = leftPos.index[indicies['left']]
#向前推演一個點。
rightIdx_fwd = rightPos. index[0] if indicies['right'] > =len(rightPos)-1 else rightPos. index[indicies['right'] 1]
leftIdx_fwd = rightPos. index[0] if indicies['left']> =len(leftPos)-1 else leftPos。 index[indicies['left'/span>] 1]
#If remaining left side is longer]。
if leftDiffMag.loc[leftIdx]-partials['left'/span>] >= rightDiffMag.loc[rightIdx]-partials['right'/span>] 。
active_side = 'left'#Step magnitude is full right step。
mag = rightDiffMag.loc[rightIdx]-partials['right']
if not mag partials['left'] >= leftDiffMag.loc[leftIdx_fwd] 。
partials['left'] = mag
else:
partials['left']=0.0。
indicies['left'] =1。
引數['right']=0.0
indicies['right'] =1
else:
#Step magnitude is full right step。
active_side = 'right''left']
if not mag partials['right'] >= rightDiffMag.loc[rightIdx_fwd] 。
partials['right'] = mag
else:
partials['right']=0.0。
indicies['right'] =1。
引數['left']=0.0
indicies['left'] =1。
rightUpdate = rightPos.loc[rightIdx] mag*rightDiffNormed.loc[rightIdx_fwd] 。
leftUpdate = leftPos.loc[leftIdx] mag*leftDiffNormed.loc[leftIdx_fwd] 。
midP = midPoint(*rightUpdate.value,*leftUpdate.value)
rights[0].append(rightUpdate.PositionX)
rights[1].append(rightUpdate.PositionZ)
lefts[0].append(leftUpdate.PositionX)
lefts[1].append(leftUpdate.PositionZ)
mids[0].append(midP[0])
mids[1].append(midP[1])
#print(active_side,indicies['left'],leftIdx,indicies['right'],rightIdx,Mag)
if indicies['right'/span>]> =len(rightPos)-1 and indicies['left'] > =len(leftPos)-1。
Done=True:
except 例外 as err:
traceback.print_exception(None, err, err.__traceback__)
print(len(rights[0]) 。 len(lefts[0]),len(mids[0))
axi = plt.subplot()
axi.plot(*rights,ls='-'/span>,marker='.'/span>,c='r')
axi.plot(*lefts,ls='-',marker='。',c='b')
axi.plot(*mids,ls='-',marker='。',c='k')
axi.set_aspect('equal')
fig,axes = plt.subplots(2)
for i in range(2)。
axes[i].plot(rights[i],c='r'/span>)
axes[i].plot(lefts[i],c='b')
axes[i].plot(mids[i],c='k')
#fig,axi = plt.subplots()。
#for rX,rZ,lX,lZ,mX,mZ in zip(*rights,*lefts,*mids):
#axi.plot([rX,mX,lX],[rZ,mZ,lZ], c='k')
最后。
plt.show()
else:
print("處理被中止!")
這比我預期的要好,但是:
這比我預期的要好。
- 它很慢,并且
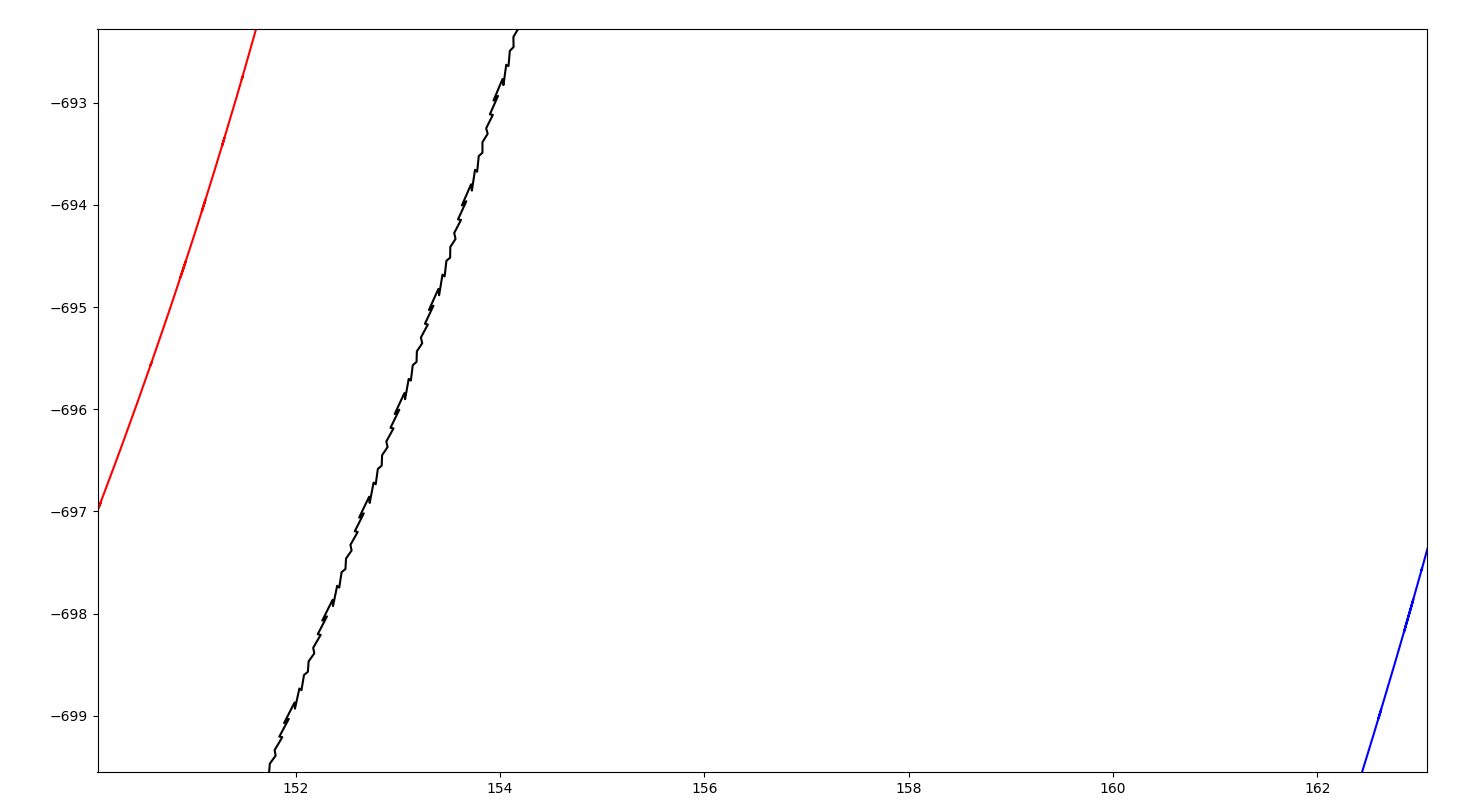
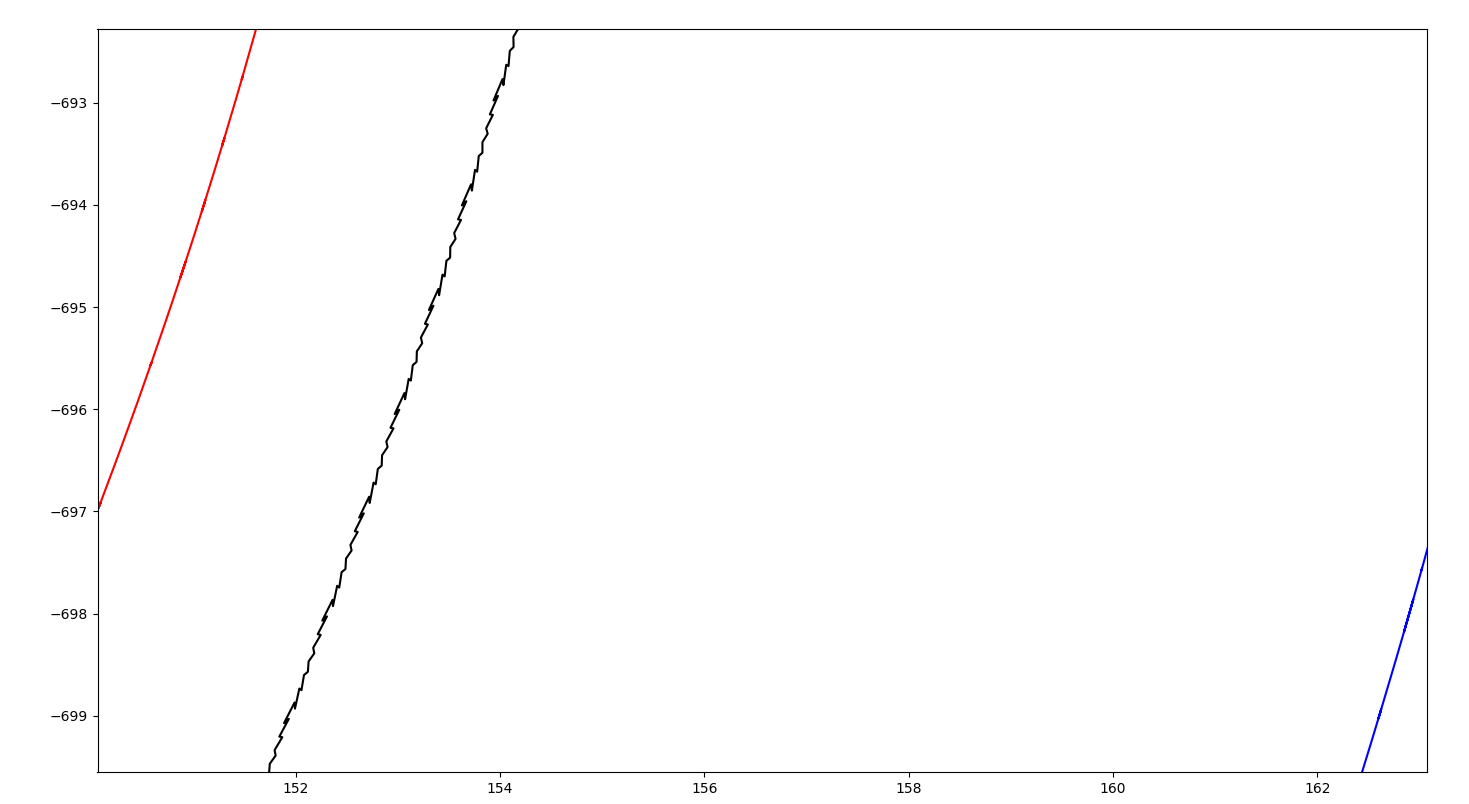
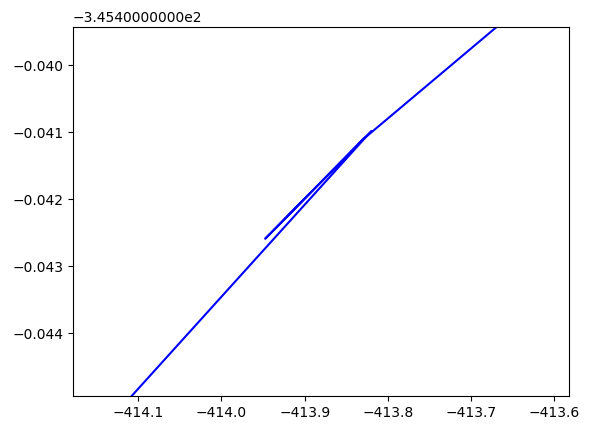
- 取決于曲率/曲率差異(我假設這是驅動誤差的原因),在一個特定的轉彎中,兩個回圈之間的曲率/曲率差異導致將中線拉向一側或另一側。
- 此外,我不確定這是否是一個實施問題或簡化了粗略方法的工件,但對中心線的更新是有噪音/鋸齒的(見下面的評論,我相信這是實施中的一個錯誤) 。
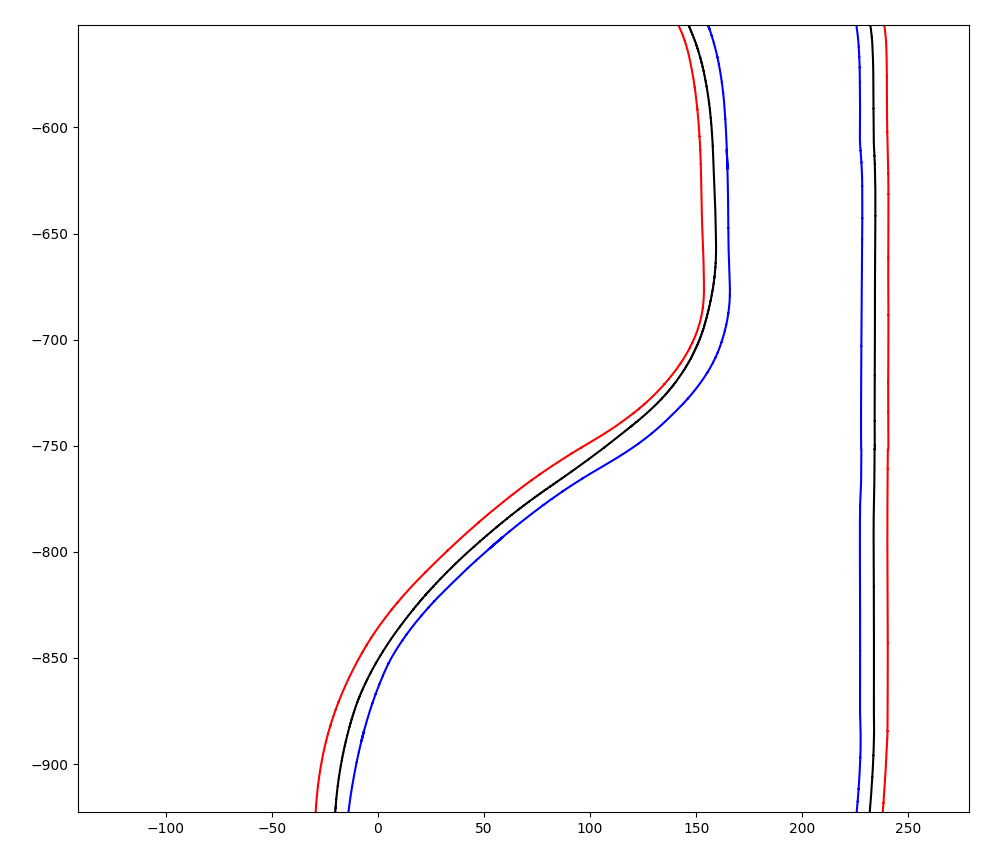
我正在尋找任何能夠找到中心線的方法。如果它能很好地獲得中心線的法線矢量(及其反面--旋轉180度),以及該法線與任何一個邊界環的相應交點(即--代表軌道上任何一點的中線與起點的距離的線),則可加分。如果中心線的步長被歸一化,則可進一步加分。
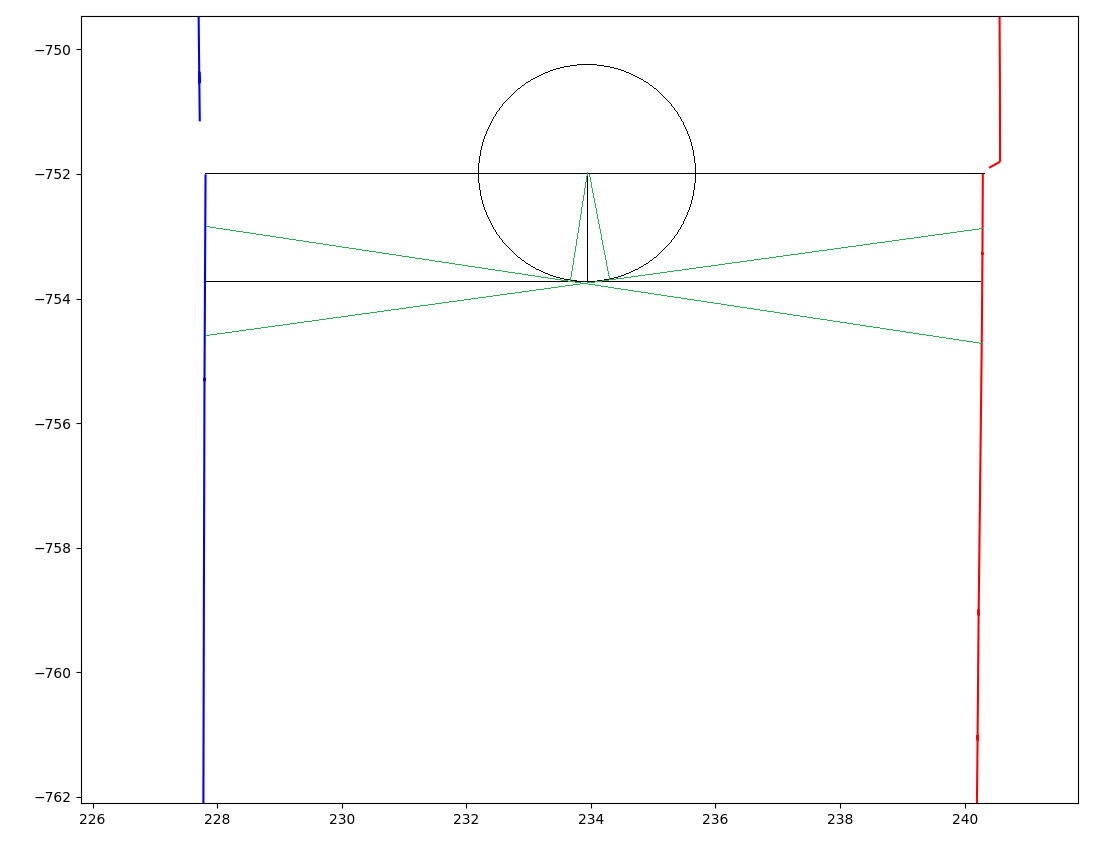
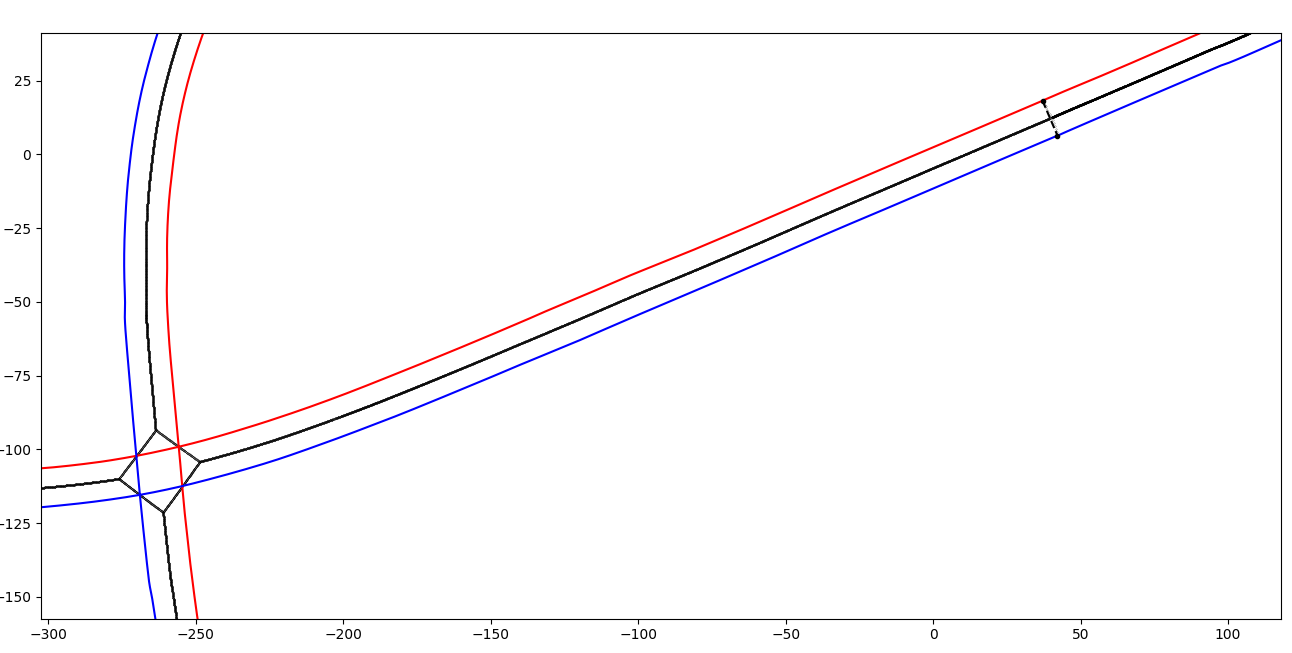
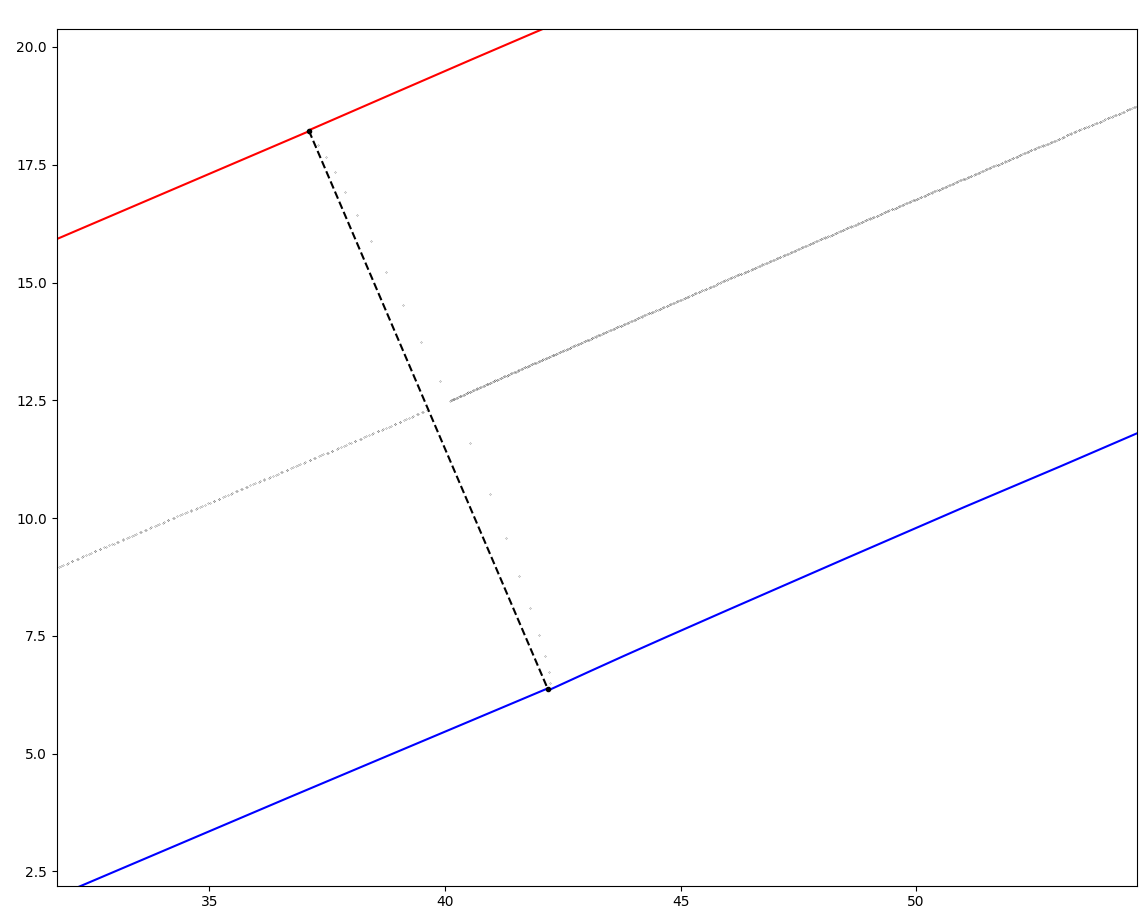
考慮到我知道行進方向和兩個環路起點的中心點,我在想一個解決方案,那就是為中心線定義一個步長,然后用這個步長代表一個半徑等于步長的半圓,然后求解與這個圓相切的最短直線,該直線以兩個外環路的交點為界。我在下面粗略地說明了這一點。我不確定是否有一種有效/優雅的方法來使用這種方法進行求解。
感謝您提供的任何反饋/指導。我認為可能有一個已知的解決方案來解決這種型別的問題,而我只是使用了錯誤的搜索條件來尋找例子。
PS - 更加仔細地觀察,似乎外環的更新存在畸變,這可能有助于解釋中線的鋸齒狀更新。無論如何,我認為中線向一側傾斜仍然是該方法的一個缺陷,而不是一個實施問題。
更新。
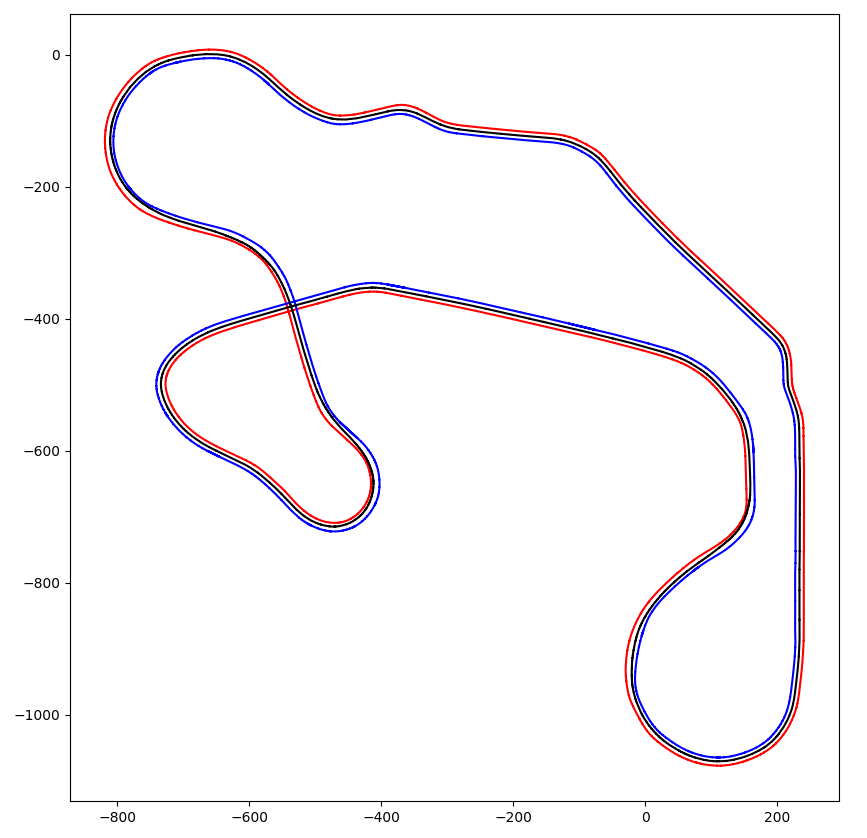
更新。 這似乎是GIS領域中經常出現的問題,在這個領域中,多段線被用來代表河流的邊界,而河流的中線是需要的。
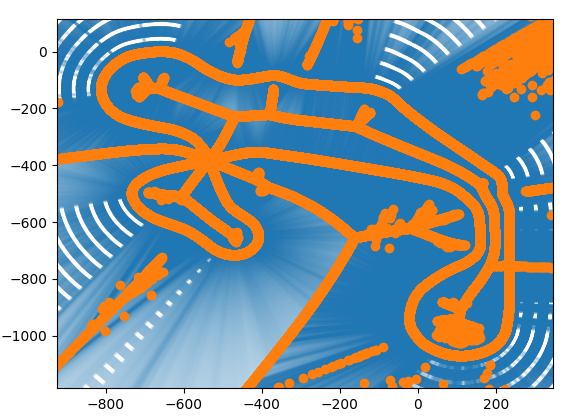
顯然,一個解決方案是生成一個Voronoi圖。這樣做將自然產生代表中線的多角頂點和邊。
舉例說明。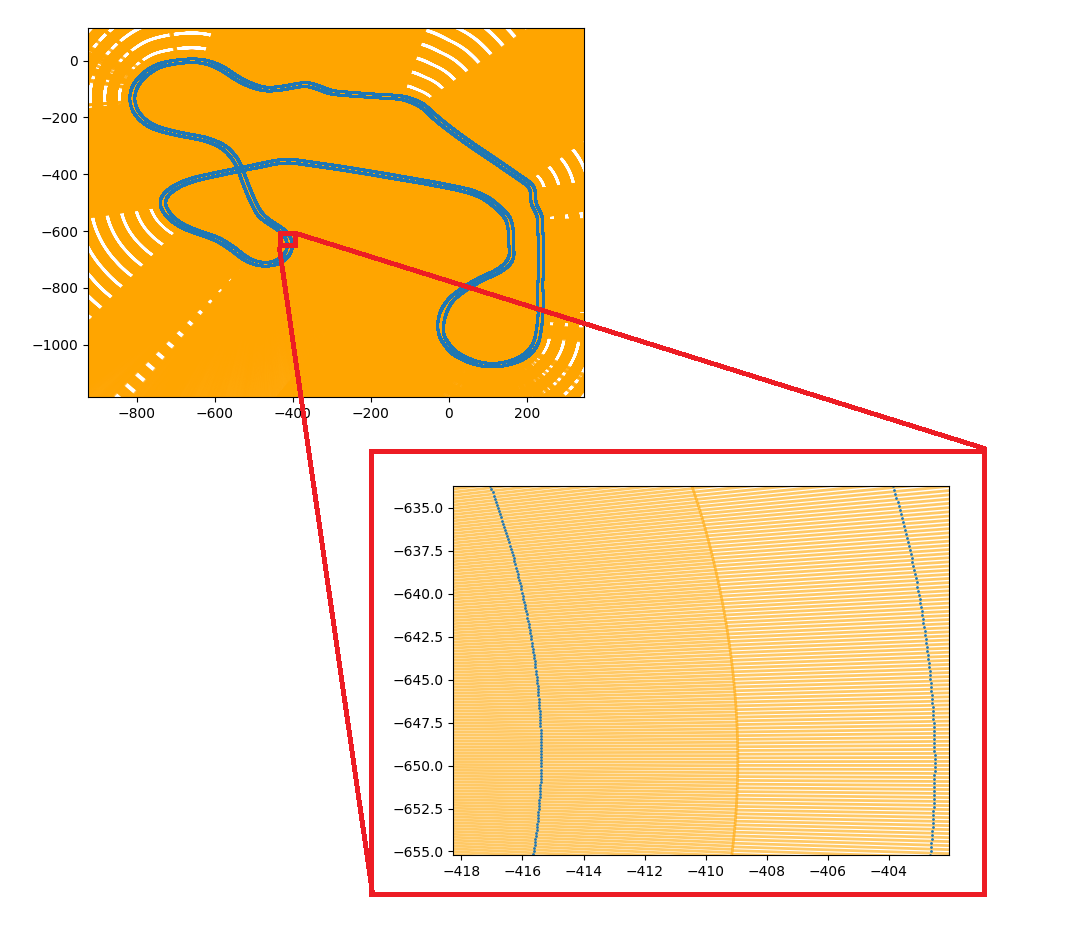
現在我只需要檢測那些位于兩個外部邊界內的Voronoi多邊形頂點。
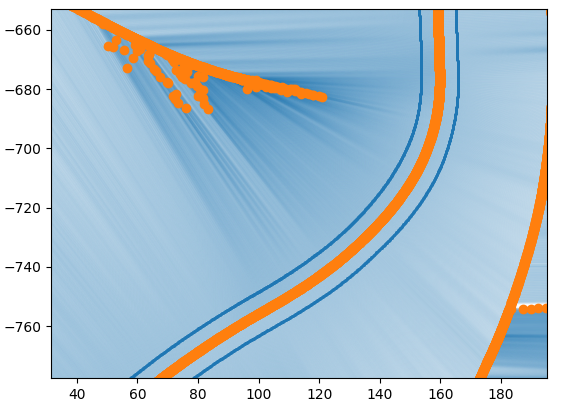
另外需要注意的是,正如你所期望的那樣,該方法很難處理自相交的軌道,因此我可能需要檢測這種情況,或者通過將軌道切割成多個部分然后再縫合起來來手動防止它。
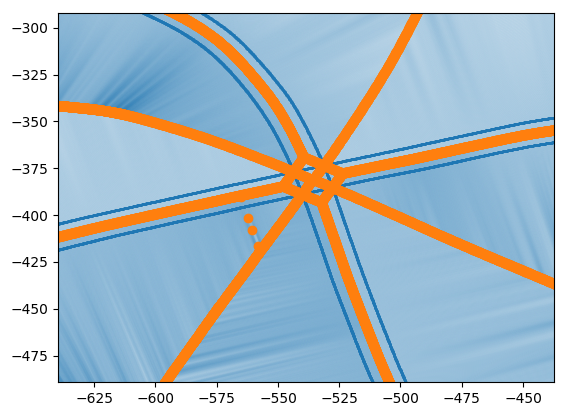
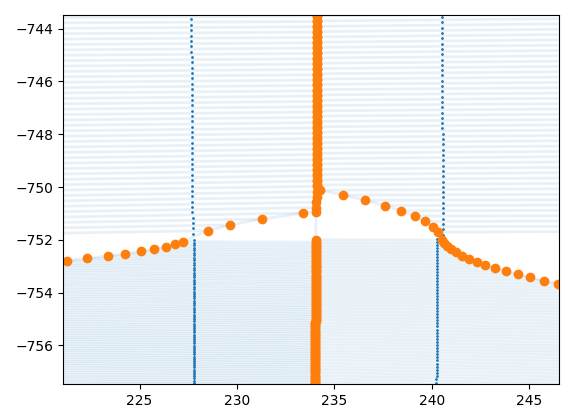
在起點/終點線上也產生了一些假象。
uj5u.com熱心網友回復:
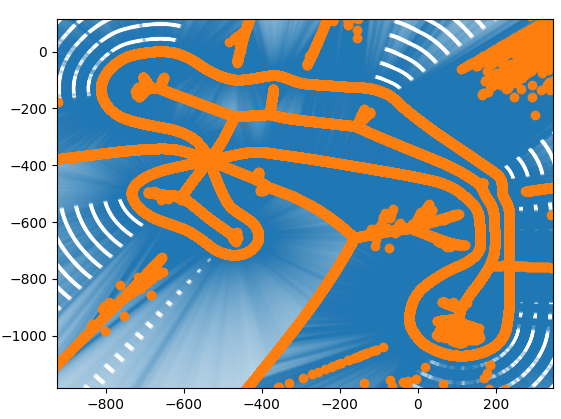
最終,scipy Voronoi和matplotlib path.contains_points的組合能夠找到中線。我還沒有解決自相交的問題,而且在起點和終點的非中線點上還存在一些小問題,但這些問題是相當小的。
下面是作業解決方案的完整代碼:
import pandas as pd
import numpy as np
from matplotlib import pyplot as plt
import matplotlib.path as mpltPath
from scipy.spatial import Voronoi
import time
fDict = {"Bernese Alps":{"fName":"2021-09-12202910_FM7_DASH","left"。 4,"right":6,"correctStart" :-1},
"Maple Valley":{"fName":"2021-08-30171416_FM7_DASH","left": 4,"right":1,"correctStart":0},}track = :0
track = "Bernese Alps"。
df = pd.read_csv(fDict[track]["fName"/span>] ".csv")
# 對應于賽道左右極限的圈數。
lapRight = fDict[track]["right"]
lapLeft = fDict[track]["left"]
# 找出從實際開始的第一點距離偏移的圈數。
# (下面 如果任何一圈是0,就會中斷)
offsetRight = (df.loc[df.LapNumber==lapRight,['DistanceTraveled']]-df.loc[df.LapNumber==lapRight-1,['DistanceTraveled']]。 max().iloc[0]. values[0]
offsetLeft = (df.loc[df.LapNumber==lapLeft,['DistanceTraveled']]-df.loc[df.LapNumber==lapLeft-1,['DistanceTraveled'])。 max().iloc[0].values[0] 。]
# 軌道左右邊緣的位置歷史記錄 # 軌道左右邊緣的位置歷史記錄
rightPos = df.loc[df.LapNumber==lapRight,['PositionX','PositionZ']].value
leftPos = df.loc[df.LapNumber==lapLeft,['PositionX','PositionZ']].value
# Finish line crossing vector to determine precise start finish line from distance traveled[/span
finalVectRight = rightPos[-1]-rightPos[0]
finalVectLeft = leftPos[-1]-leftPos[0]
# 尋找實際的起始點,假設起始點和結束點是行內的。
# 開始和結束之間的任何對齊問題將導致起始線的傾斜。
rightStart = rightPos[0] finalVectRight/np.sqrt(sum(finalVectRight**2))*offsetRight
leftStart = leftPos[0] finalVectLeft/np.sqrt(sum(finalVectLeft**2) )*offsetLeft
if fDict[track] in (0,1) 。
# 糾正起始線skey,假設起始線是X或Z軸的法線。
# (這在起跑線實際上不屬于正常主軸的情況下是行不通的)。
nonStartDirIdx = fDict[track]["correctStart"]
rightStart[nonStartDirIdx] = rightPos[0][nonStartDirIdx] 。
leftStart[nonStartDirIdx] = leftPos[0][nonStartDirIdx] 。
#average the starline error (appeared to be on the order of ~ 2-3 inches ) in direction of travel。
startDirIdx = 1 if not nonStartDirIdx else 0 >。
avgStartDirPos = (rightStart[startDirIdx] leftStart[startDirIdx])*.5
rightStart[startDirIdx] = avgStartDirPos
leftStart[startDirIdx] = avgStartDirPos
# Plot to check[/span
fig, axi = plt.subplots()
plt.plot(*rightPos.T,'r-')
plt.plot(*leftPos.T,'b-')
plt.plot(*np.array([rightStart,leftStart]).T,'k-',marker='。')
axi.set_aspect('equal')
plt.show()
# generate poly points to compute Voronoi and find midline[/span]。
# 將左右兩邊的點連接起來以創建開放的多邊形。
polygon = np.concatenate([rightPos,leftPos])
# turn this into matplotlib path object[/span]
path = mpltPath.Path(polygon)
# then compute Voronoi diagram for the polygon to get the Vornoi verticies
vor = Voronoi(polygon)
# 確定其中哪些位于多邊形內部。
# 首先將所考慮的點限制在軌道邊緣延伸的原始物理界限內。
# 不這樣做會導致內部檢查失敗 # 不這樣做會導致內部檢查失敗
vX = vor.vertices.T[0]
vZ = vor.vertices.T[1]
vorMask = (vX>=polygon.T[0].min())& (vX<=polygon. T[0].max())& (vZ>=polygon. T[1].min())& (vZ<=polygon.T[1].max()
verts = vor.vertices[vorMask]。
print("開始檢查以找到多邊形內的Voronoi頂點...")
start=time.time()
insideMask = path.contains_points(verts)
end=time.time()
print(" 檢查哪些{:,d}點位于{:,d}點的多邊形內花了{:,.2f}秒完成。 ".format(len(verts),len(polygon),end-start)
midLine = verts[internalMask] (中線)
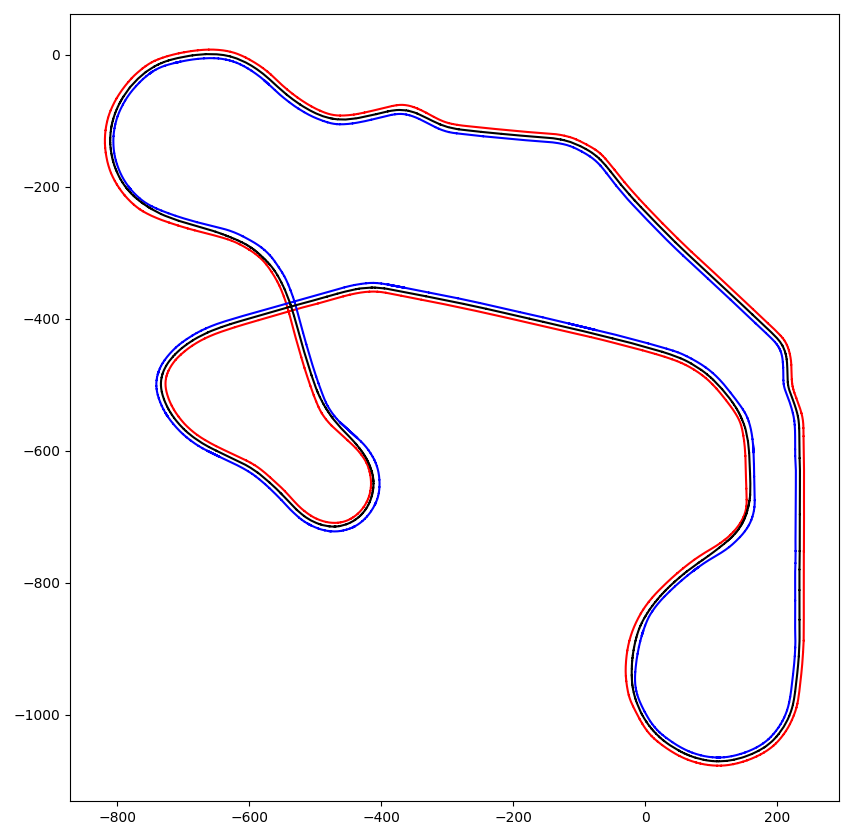
# Plot to check[/span]。
fig, axi = plt.subplots()
plt.plot(*rightPos.T,'r-'/span>)
plt.plot(*leftPos.T,'b-')
plt.plot(*np.array([rightStart,leftStart]).T,'k-',marker='. ' )
plt.scatter(*verts[insideMask].T,color='orange',marker='。',s=.1)
axi.set_aspect('equal')
plt.show()
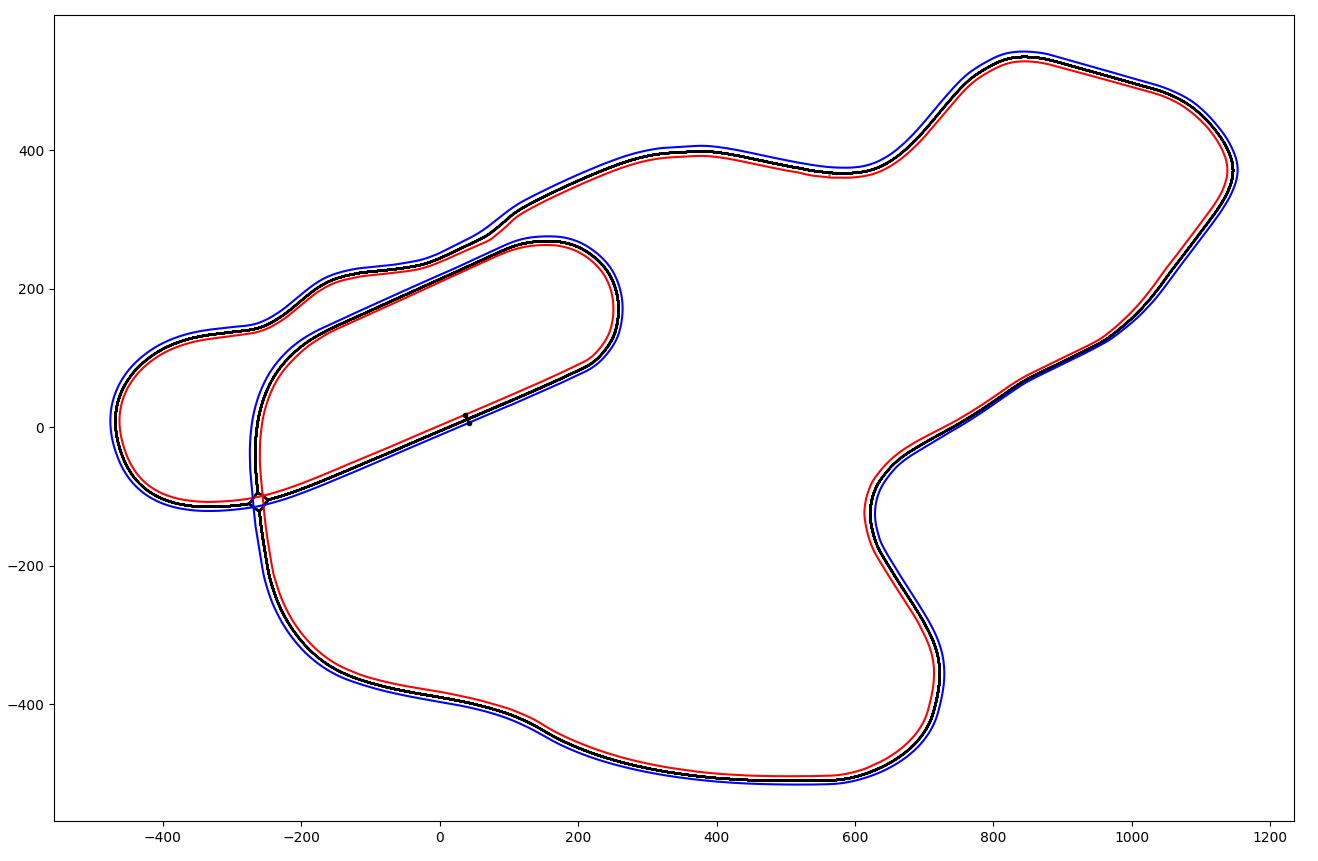
而這里是一個輸出的例子:
開始檢查,尋找多邊形內的Voronoi頂點......
檢查164,650個點中哪些位于94,514個點的多邊形內 點中的哪一個位于多邊形的94,514個點內,需要143.72秒才能完成。
 。
。
PS - 使用matplotlib path.contains_points來尋找中線,主要是為了方便使用。正如所指出的那樣,這種方法可能需要一兩分鐘才能從一個由大約10萬個點組成的多邊形中的15萬多個頂點中找到中線。對于這種規模的多邊形和點串列,可能有更有效的解決方案,但這個方法符合我的需求,而且很容易使用。如果你對更快的東西感興趣,請看。在python中檢查一個點是否在一個多邊形內的最快方法是什么
。uj5u.com熱心網友回復:
暫時假設在一個特定的位置,外面是兩條相當長的線段。中心線將由與它們的正交投影訃為每條線的距離相等的點組成。我強烈懷疑,如果你的線段以黑森法線形式表示,即ax by c=0,a2 b2=1,那么只要將這兩個方程相加,就可以得到作為角平分線的中心線的方程,即平行線段的相應概括。請確保這些線的法線具有相匹配的方向,例如,從沿中心線行駛的車輛的方向看,所有的線都是向左行駛。
由于你在每一側有多條線段,你需要考慮到它們之間的變化。在任何一邊,你都可能有一個凸面或凹面的頂點,也就是說,在一個(輕微的)角落里,邊界會向外或向內彎曲。如果它向外彎曲,那么就有一個點,中心線與在該角相遇的兩個線段的距離相等。在這一點上,你就用其中一條來定義中心線,而開始用另一條來代替。一個不同的觀點是,兩個連續的線段中的每一個都與對面的線段一起定義自己的中心線,而兩個中心線相交的點就是你從一個線段轉換到另一個線段的地方。你最終又變成了線段。
如果一個角向內彎曲,那么對于中心線上的某些點,該邊界上最近的點將不是線段的正交投影,而是那個角。與一個點和一條線距離相等的所有點的集合是一個拋物線,點是它的焦點,線是它的直角。正交投影將落在那一邊的兩個線段之外。線和線段之間的交叉點將是正交投影與每個線段的終點重合的地方,即在通過其端點的垂直于該線段的線上。你是否準備在你的輸出中處理中心線的拋物線,或者你是否需要以某種方式近似這些?
如果您的兩邊都有相近的角,所有這些都會變得更加復雜。你可能會遇到這樣的情況:中心線的拋物線被直角段的變化所打斷,以及類似的情況。獲得一個完整的解決方案,保證對所有的輸入都做正確的事情,聽起來是一個重大的努力。在大多數典型的使用情況下,能夠合理地作業的東西應該是可以做到的。
到目前為止,這一直是一個相當數學化的答案。為了使我們的演算法更加合理,假設您目前正在查看一對相對的線段以及它們之間的中心線。你的代碼應該確定每條邊上的下一個角,以及該角之后的線段。有了這些資訊,它就可以確定當前的直線中心線將結束于那個角的位置。取兩個變化中較近的一個,以適當的方式將中心線段縫合在一起(可能使用拋物線片),然后用其中一個段交換其后續段。注意那些終點在起點之前的中心線段,那是事情變得混亂的地方。我沒有一個現成的解決方案來處理它們,但可以在測驗資料上檢查它們,以決定在實踐中它們有多大的可能性和多壞。
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/319961.html
標籤:
上一篇:TinyMCE編輯器不顯示在JQueryUI對話框內
下一篇:檢查例外型別而不考慮TC#