開發板購買鏈接
https://item.taobao.com/item.htm?spm=a2oq0.12575281.0.0.50111deb2Ij1As&ft=t&id=626366733674
開發板簡介
開發環境搭建 windows
基礎例程:
0_Hello Bug (ESP_LOGX與printf) 工程模板/列印除錯輸出
1_LED LED亮滅控制
2_LED_Task 使用任務方式控制LED
3_LEDC_PWM 使用LEDC來控制LED實作呼吸燈效果
4_ADC_LightR 使用ADC讀取光敏電阻實作光照傳感
5_KEY_Short_Long 按鈕長按短按實作
6_TouchPad_Interrupt 電容觸摸中斷實作
7_WS2812_RMT 使用RMT實作RGB_LED彩虹變色示例
8_DHT11_RMT 使用RMT實作讀取DHT11溫濕度傳感器
9_SPI_SDCard 使用SPI總線實作TF卡檔案系統示例
10_IIC_ADXL345 使用IIC總線實作讀取ADXL345角度加速度傳感器
11_IIC_AT24C02 使用IIC總線實作小容量資料儲存測驗
12_IR_Rev_RMT 使用RMT實作紅外遙控接收解碼(NEC編碼)
13_IR_Send_RMT 使用RMT實作紅外資料發送(NEC編碼)
14_WIFI_Scan 附近WIFI信號掃描示例
15_WIFI_AP 創建軟AP示例
16_WIFI_AP_TCP_Server 在軟AP模式下實作TCP服務端
17_WIFI_AP_TCP_Client 在軟AP模式下實作TCP客戶端
18_WIFI_AP_UDP 在軟AP模式下實作UDP通訊
19_WIFI_STA 創建STA站模連接路由器
20_WIFI_STA_TCP_Server 在站模式STA下實作TCP服務端
21_WIFI_STA_TCP_Client 在站模式STA下實作TCP客戶端
22_WIFI_STA_UDP 在站模式STA下實作UDP通訊
23_LCD_Test LCD液晶觸摸屏顯示測驗
24_LVGL_Test LVGL圖形庫簡單示例
TFTLCD 簡介
TFT-LCD 即薄膜晶體管液晶顯示幕,其英文全稱為: Thin Film Transistor-Liquid Crystal Display, TFT-LCD 與無源 TN-LCD、 STN-LCD 的簡單矩陣不同,它在液晶顯示屏的每一個象素上都設定有一個薄膜晶體管(TFT),可有效地克服非選通時的串擾,使顯示液晶屏的靜態特性與掃描線數無關,因此大大提高了影像質量, TFT-LCD 也被叫做真彩液晶顯示幕,
開發板上使用的液晶屏ILI9841引數如下
顯示顏色 RGB 65K彩色
觸摸芯片 XPT2046
尺寸 3.2(inch)
型別 TFT
驅動芯片 ILI9341
解析度 320*240 (Pixel)
模塊介面 4-wire SPI interface
有效顯示區域(AA區) 48.6x64.8(mm)
作業溫度 -20℃~60℃
存盤溫度 -30℃~70℃
VCC電源電壓 3.3V~5V
邏輯IO口電壓 3.3V(TTL)
SPI簡介
1、什么是SPI?
SPI是串行外設介面(Serial Peripheral Interface)的縮寫,是 Motorola 公司推出的一種同步串行介面技術,是一種高速的,全雙工,同步的通信總線,
2、SPI優點
支持全雙工通信
通信簡單
資料傳輸速率塊
3、缺點
沒有指定的流控制,沒有應答機制確認是否接收到資料,所以跟IIC總線協議比較在資料可靠性上有一定的缺陷,
4、特點
1):高速、同步、全雙工、非差分、總線式
2):主從機通信模式
5、協議通信時序詳解
1):SPI的通信原理很簡單,它以主從方式作業,這種模式通常有一個主設備和一個或多個從設備,需要至少4根線,事實上3根也可以(單向傳輸時),也是所有基于SPI的設備共有的,它們是SDI(資料輸入)、SDO(資料輸出)、SCLK(時鐘)、CS(片選),
(1)SDO/MOSI – 主設備資料輸出,從設備資料輸入;
(2)SDI/MISO – 主設備資料輸入,從設備資料輸出;
(3)SCLK – 時鐘信號,由主設備產生;
(4)CS/SS – 從設備使能信號,由主設備控制,當有多個從設備的時候,因為每個從設
備上都有一個片選引腳接入到主設備機中,當我們的主設備和某個從設備通信時將需要將從設備對應的片選引腳電平拉低或者是拉高,
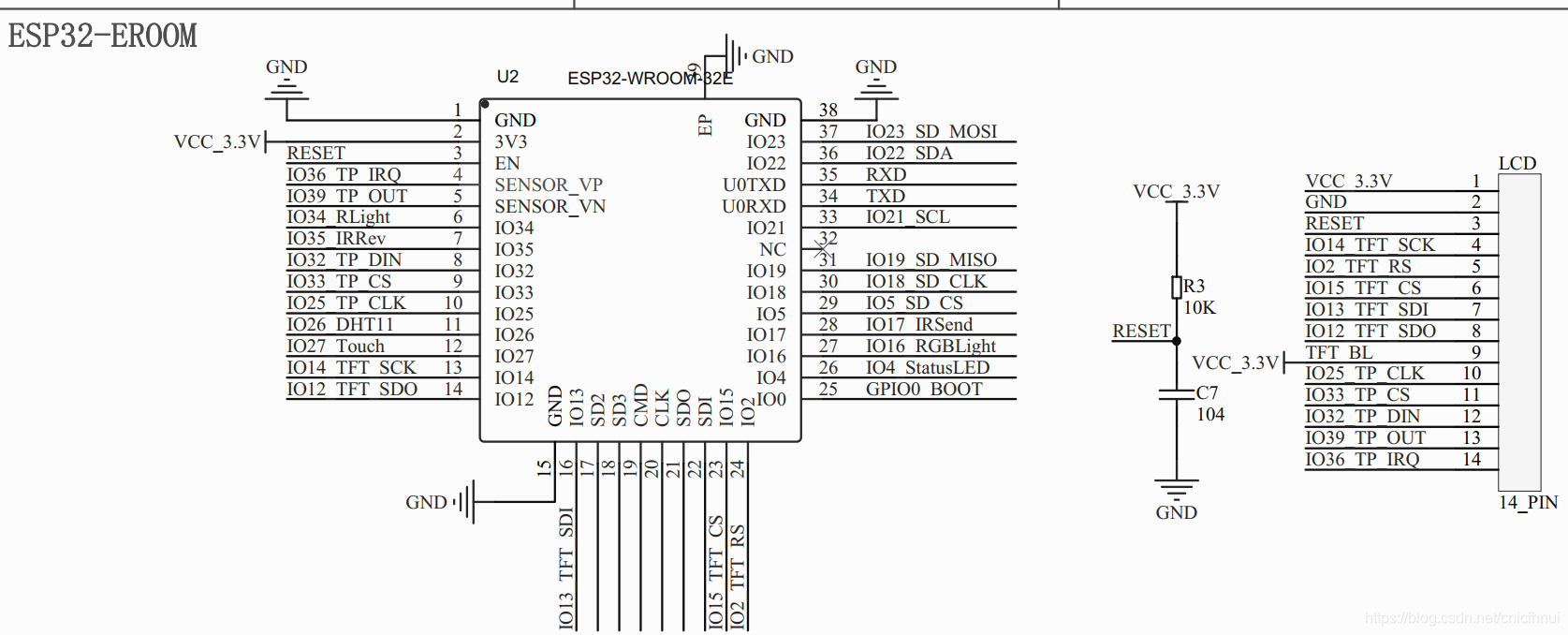
一、硬體原理
ESP32 有四個 SPI 外設,稱為 SPI0,SPI1,HSPI 和 VSPI. SPI0 是專用于 flash 快取, ESP32 將連接的 SPI flash 設備映射到存盤器. SPI1 和 SPI0 使用相同的硬體線,SPI1 用于寫入 flash 芯片. HSPI 和 VSPI 可以任意使用. SPI1,HSPI 和 VSPI 都有三條片選線,作為 SPI 主機允許它們最多驅動三個 SPI 設備
液晶屏用到的是VSPI_HOST即SPI3_HOST
查看原理圖,除了SPI必要發四根線其實還有三根控制線,是RESET,BL,RS
RESET是液晶復位信號線,由于開始板GPIO緊張所以與系統的RESET線接在一起,同樣的BL是液晶的背光控制線,也直接接到了3.3V,RS是命令/資料選擇信號線,接到IO2引腳上,觸摸信號下編再講,
二、代碼撰寫
代碼分為三個檔案,主函式main檔案,lcd底層驅動檔案,gui上層顯示檔案
先看main檔案
匯入必要頭檔案
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_system.h"
#include "driver/gpio.h"
#include "lcd.h"
#include "gui.h"
#include "pic.h"
main函式,直接呼叫底層初始化和上層畫圖
void app_main(void)
{
esp_err_t ret;
Init_LCD();
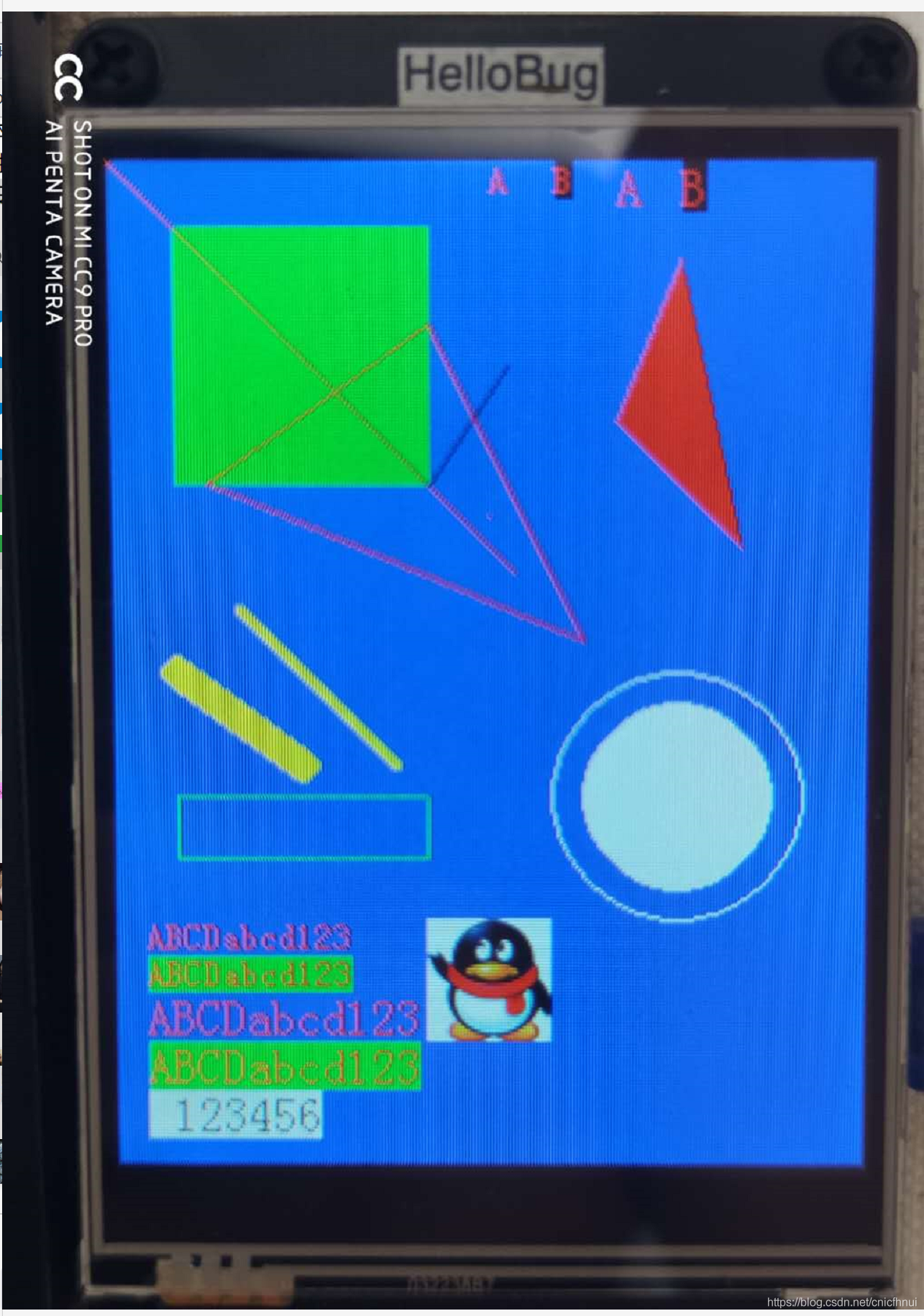
// 實心矩形
LCD_DrawFillRectangle(20,20,100,100,GREEN);
// 空心矩形
LCD_DrawRectangle(20,220,100,200,GREEN);
// 畫圓
LCD_Draw_Circle(180,200,40,WHITE);
// 畫實心圓
LCD_Draw_FillCircle(180,200,30,WHITE);
// 畫點
LCD_DrawPoint(120,110,RED);
// 畫線
LCD_DrawLine(0, 0, 128, 128,RED);
// 畫角度線
LCD_Draw_AngleLine(100,100,35,85,BLACK);
// 畫粗線1
LCD_DrawBLine0(20,160,60,190,5,YELLOW);
// 畫粗線2
LCD_DrawBLine1(40,140,90,190,2,YELLOW);
// 畫三角形
LCD_DrawTriangel(100,50,30,100,150,150,RED);
// 畫實心三角形
LCD_DrawFillTriangel(180,30,160,80,200,120,RED);
// 顯示單個字符
LCD_ShowChar(120,0,BLACK,RED, 'A',12,1);
LCD_ShowChar(140,0,BLACK,RED, 'B',12,0);
LCD_ShowChar(160,0,BLACK,RED, 'A',16,1);
LCD_ShowChar(180,0,BLACK,RED, 'B',16,0);
// 顯示字串
LCD_ShowString(10,240,GREEN,RED,12,"ABCDabcd123",1);
LCD_ShowString(10,252,GREEN,RED,12,"ABCDabcd123",0);
LCD_ShowString(10,264,GREEN,RED,16,"ABCDabcd123",1);
LCD_ShowString(10,280,GREEN,RED,16,"ABCDabcd123",0);
// 顯示數字
LCD_ShowNum(10,296,WHITE,BLACK,123456,7,16);
// 顯示圖片
LCD_Drawbmp16(100,240,gImage_qq);
}接下來看lcd底層驅動,包括SPI初始化,LCD初始化,設定方向,設定視窗,SPI寫資料,寫命令等等底層驅動
lcd.c
匯入必要頭檔案
#include "esp_log.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "stdint.h"
#include "stdbool.h"
#include "driver/gpio.h"
#include "lcd.h"
#include "math.h"
#include "string.h"SPI和LCD液晶初始化
// 初始化液晶
void Init_LCD(void)
{
int cmd=0;
lcd_init_cmd_t ili_init_cmds[]={
{0xCF, {0x00, 0xD9, 0X30}, 3},
{0xED, {0x64, 0x03, 0X12, 0X81}, 4},
{0xE8, {0x85, 0x10, 0x7A}, 3},
{0xCB, {0x39, 0x2C, 0x00, 0x34, 0x02}, 5},
{0xF7, {0x20}, 1},
{0xEA, {0x00, 0x00}, 2},
{0xC0, {0x1B}, 1}, /*Power control*/
{0xC1, {0x12}, 1}, /*Power control */
{0xC5, {0x26, 0x26}, 2}, /*VCOM control*/
{0xC7, {0xB0}, 1}, /*VCOM control*/
{0x36, {0x08}, 1}, /*Memory Access Control*/
{0x3A, {0x55}, 1}, /*Pixel Format Set*/
{0xB1, {0x00, 0x1A}, 2},
{0xB6, {0x0A, 0xA2}, 2},
{0xF2, {0x00}, 1},
{0x26, {0x01}, 1},
{0xE0, {0x1F, 0x24, 0x24, 0x0D, 0x12, 0x09, 0x52, 0XB7, 0x3F, 0x0C, 0x15, 0x06, 0x0E, 0x08, 0x00}, 15},
{0XE1, {0x00, 0x1B, 0x1B, 0x02, 0x0E, 0x06, 0x2E, 0x48, 0x3F, 0x03, 0x0A, 0x09, 0x31, 0x37, 0x1F}, 15},
{0x2B, {0x00, 0x00, 0x01, 0x3f}, 4},
{0x2A, {0x00, 0x00, 0x00, 0xEF}, 4},
//
//{0x2C, {0}, 0},
//{0xB7, {0x07}, 1},
{0x11, {0}, 0x80},
{0x29, {0}, 0x80},
{0, {0}, 0xff},
};
esp_err_t ret;
// SPI總線配置
spi_bus_config_t buscfg = {
.miso_io_num = PIN_NUM_MISO,
.mosi_io_num = PIN_NUM_MOSI,
.sclk_io_num = PIN_NUM_CLK,
.quadwp_io_num = -1,
.quadhd_io_num = -1,
.max_transfer_sz=PARALLEL_LINES*320*2+8
};
// SPI驅動介面配置
spi_device_interface_config_t devcfg = {
.clock_speed_hz = 30*1000*1000, // SPI時鐘 30 MHz
.mode = 0, // SPI模式0
.spics_io_num = PIN_NUM_CS, // CS片選信號引腳
.queue_size = 7, // 事務佇列尺寸 7個
.pre_cb = lcd_spi_pre_transfer_callback, // 資料傳輸前回呼,用作D/C(資料命令)線分別處理
};
// 初始化SPI總線
ret=spi_bus_initialize(LCD_HOST, &buscfg, DMA_CHAN);
ESP_ERROR_CHECK(ret);
// 添加SPI總線驅動
ret=spi_bus_add_device(LCD_HOST, &devcfg, &LCD_SPI_Handle);
ESP_ERROR_CHECK(ret);
// 初始化其它控制引腳
gpio_set_direction(PIN_NUM_DC, GPIO_MODE_OUTPUT);
//gpio_set_direction(PIN_NUM_RST, GPIO_MODE_OUTPUT);
//gpio_set_direction(PIN_NUM_BCKL, GPIO_MODE_OUTPUT);
// Reset the display
//gpio_set_level(PIN_NUM_RST, 0);
//vTaskDelay(100 / portTICK_RATE_MS);
//gpio_set_level(PIN_NUM_RST, 1);
//vTaskDelay(100 / portTICK_RATE_MS);
uint32_t lcd_id = LCD_Get_ID();
printf("LCD ID: %08X\n", lcd_id);
printf("LCD ILI9341 initialization.\n");
// 回圈發送設定所有暫存器
while (ili_init_cmds[cmd].databytes!=0xff) {
LCD_WriteCMD(ili_init_cmds[cmd].cmd);
LCD_WriteDate(ili_init_cmds[cmd].data, ili_init_cmds[cmd].databytes&0x1F);
if (ili_init_cmds[cmd].databytes&0x80) {
vTaskDelay(100 / portTICK_RATE_MS);
}
cmd++;
}
LCD_Set_Orientation(LCD_DISPLAY_ORIENTATION_PORTRAIT);// 縱向
//LCD_WriteCMD(0x21);// 翻轉顏色
LCD_WriteCMD(0x20);
LCD_Clear(BLUE);
// gpio_set_level(PIN_NUM_BCKL, 0); // 點亮LCD屏
}SPI向LCD寫命令
void LCD_WriteCMD(const uint8_t cmd)
{
esp_err_t ret;
spi_transaction_t t;
memset(&t, 0, sizeof(t)); // 清空結構體
t.length=8; // 要傳輸的位數 一個位元組 8位
t.tx_buffer=&cmd; // 將命令填充進去
t.user=(void*)0; // 設定D/C 線,在SPI傳輸前回呼中根據此值處理DC信號線
ret=spi_device_polling_transmit(LCD_SPI_Handle, &t); // 開始傳輸
assert(ret==ESP_OK); // 一般不會有問題
}SPI向LCD寫資料
void LCD_WriteDate(const uint8_t *data, int len)
{
esp_err_t ret;
spi_transaction_t t;
if (len==0) return; // 長度為0 沒有資料要傳輸
memset(&t, 0, sizeof(t)); // 清空結構體
t.length=len*8; // 要寫入的資料長度 Len 是位元組數,len, transaction length is in bits.
t.tx_buffer=data; // 資料指標
t.user=(void*)1; // 設定D/C 線,在SPI傳輸前回呼中根據此值處理DC信號線
ret=spi_device_polling_transmit(LCD_SPI_Handle, &t); // 開始傳輸
assert(ret==ESP_OK); // 一般不會有問題
}SPI發送前回呼DC信號線處理
void lcd_spi_pre_transfer_callback(spi_transaction_t *t)
{
int dc = (int)t->user;
gpio_set_level(PIN_NUM_DC, dc);
}設定螢屏方向,4個方向
// 設定螢屏方向
void LCD_Set_Orientation(uint8_t orientation)
{
const char *orientation_str[] = {"PORTRAIT", "PORTRAIT_INVERTED", "LANDSCAPE", "LANDSCAPE_INVERTED"};
printf("%s->Display orientation: %s\n",TAG, orientation_str[orientation]);
uint8_t data[] = {(1<<3)|(0<<6)|(0<<7), (1<<3)|(1<<6)|(1<<7), (1<<3)|(0<<7)|(1<<6)|(1<<5), (1<<3)|(1<<7)|(1<<5)};
//(1<<3)|(0<<6)|(0<<7)); // BGR==1,MY==0,MX==0,MV==0
//(1<<3)|(0<<7)|(1<<6)|(1<<5)); // BGR==1,MY==1,MX==0,MV==1
//(1<<3)|(1<<6)|(1<<7)); // BGR==1,MY==0,MX==0,MV==0
//(1<<3)|(1<<7)|(1<<5)); // BGR==1,MY==1,MX==0,MV==1
LCD_Orientation = orientation;
if(orientation == LCD_DISPLAY_ORIENTATION_PORTRAIT || orientation == LCD_DISPLAY_ORIENTATION_PORTRAIT_INVERTED){
LCD_Width = 240; // LCD 寬度
LCD_Height = 320; // LCD 高度
}else if(orientation == LCD_DISPLAY_ORIENTATION_LANDSCAPE || orientation == LCD_DISPLAY_ORIENTATION_LANDSCAPE_INVERTED){
LCD_Width = 320; // LCD 寬度
LCD_Height = 240; // LCD 高度
}
printf("%s->0x36 command value: 0x%02X\n",TAG, data[orientation]);
LCD_WriteCMD(0x36);
LCD_WriteDate((void *) &data[orientation], 1);
}清屏成指定顏色
// 清屏指定顏色
void LCD_Clear(uint16_t Color)
{
unsigned int i,m;
uint8_t databuf[2] = {0,0};
LCD_SetWindows(0,0,LCD_Width-1,LCD_Height-1);
for(i=0;i<LCD_Height;i++){
for(m=0;m<LCD_Width;m++){
databuf[0] = (Color>>8)&0xFF;
databuf[1] = Color&0xFF;
LCD_WriteDate(databuf,2);
}
}
} 設定視窗
// 設定視窗
void LCD_SetWindows(uint16_t xStar, uint16_t yStar,uint16_t xEnd,uint16_t yEnd)
{
uint8_t databuf[4] = {0,0,0,0};
databuf[0] = xStar>>8;
databuf[1] = 0xFF&xStar;
databuf[2] = xEnd>>8;
databuf[3] = 0xFF&xEnd;
LCD_WriteCMD(0x2A);
LCD_WriteDate(databuf,4);
databuf[0] = yStar>>8;
databuf[1] = 0xFF&yStar;
databuf[2] = yEnd>>8;
databuf[3] = 0xFF&yEnd;
LCD_WriteCMD(0x2B);
LCD_WriteDate(databuf,4);
LCD_WriteCMD(0x2C); //開始寫入GRAM
} gui.c上層驅動包含了畫圖形,字串,數字,圖片的驅動
匯入必要頭檔案,這里要包含資料庫math.h
#include "esp_log.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "stdint.h"
#include "stdbool.h"
#include "../LCD/include/lcd.h"
#include "gui.h"
#include "font.h"
#include "math.h"
#include "string.h"還要定義一個π用于計算角度
//π值定義
#define app_pi 3.1415926535897932384626433832795 畫點
// 畫點
void LCD_DrawPoint(uint16_t x,uint16_t y,uint16_t color)
{
LCD_SetCursor(x,y);//設定游標位置
LCD_WriteDate16(color);
}畫圓
// 畫圓
void LCD_Draw_Circle(uint16_t x0,uint16_t y0,uint16_t r,uint16_t color)
{
int a,b;
int di;
a=0;b=r;
di=3-(r<<1); //判斷下個點位置的標志
while(a<=b){
LCD_DrawPoint(x0+a,y0-b,color); //5
LCD_DrawPoint(x0+b,y0-a,color); //0
LCD_DrawPoint(x0+b,y0+a,color); //4
LCD_DrawPoint(x0+a,y0+b,color); //6
LCD_DrawPoint(x0-a,y0+b,color); //1
LCD_DrawPoint(x0-b,y0+a,color);
LCD_DrawPoint(x0-a,y0-b,color); //2
LCD_DrawPoint(x0-b,y0-a,color); //7
a++;
//使用Bresenham演算法畫圓
if(di<0){
di +=4*a+6;
}else{
di+=10+4*(a-b);
b--;
}
}
}畫實心圓
// 畫實心圓
void LCD_Draw_FillCircle(uint16_t x0,uint16_t y0,uint16_t r,uint16_t color)
{
uint16_t a,b;
int di;//uint16_t di 畫實心菱形
a=0;b=r;
di=3-(r<<1); // 判斷下個點位置的標志
while(a<=b){
int i = a,p = b;
while(i>0){
LCD_DrawPoint(x0+b,y0-i,color);
LCD_DrawPoint(x0-i,y0+b,color);
i--;
}
while(p>0){
LCD_DrawPoint(x0-a,y0-p,color);
LCD_DrawPoint(x0-p,y0-a,color);
LCD_DrawPoint(x0+a,y0-p,color);
LCD_DrawPoint(x0-p,y0+a,color);
LCD_DrawPoint(x0+a,y0+p,color);
LCD_DrawPoint(x0+p,y0+a,color);
p--;
}
a++;
//Bresenham演算法畫圓
if(di<0){
di +=4*a+6;
}else{
di+=10+4*(a-b);
b--;
}
}
LCD_DrawPoint(x0,y0,color); //圓心坐標
}畫線(單像素)
// 畫線(單像素)
void LCD_DrawLine(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2,uint16_t color)
{
uint16_t t;
int xerr=0,yerr=0,delta_x,delta_y,distance;
int incx,incy,uRow,uCol;
delta_x=x2-x1; //計算坐標增量
delta_y=y2-y1;
uRow=x1;
uCol=y1;
if(delta_x>0)incx=1; //設定單步方向
else if(delta_x==0)incx=0;//垂直線
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if(delta_y==0)incy=0;//水平線
else{incy=-1;delta_y=-delta_y;}
if( delta_x>delta_y)distance=delta_x; //選取基本增量坐標軸
else distance=delta_y;
for(t=0;t<=distance+1;t++ ){//畫線輸出
LCD_DrawPoint(uRow,uCol,color);//畫點
xerr+=delta_x ;
yerr+=delta_y ;
if(xerr>distance) {
xerr-=distance;
uRow+=incx;
}
if(yerr>distance) {
yerr-=distance;
uCol+=incy;
}
}
}畫指定角度的線
// 畫角度線
void LCD_Draw_AngleLine(uint16_t x,uint16_t y,uint16_t Angle,uint16_t r,uint16_t color)
{
int sx=x-r;
int sy=y-r;
int px0,px1;
int py0,py1;
uint8_t r1;
int d = r;
r1=d/2+3;
px0=x;//sx+r+(r-d-7)*sin((app_pi/30)*Angle);
py0=y;//sy+r-(r-d-7)*cos((app_pi/30)*Angle);
px1=sx+r+r1*sin((app_pi/180)*Angle);
py1=sy+r-r1*cos((app_pi/180)*Angle);
LCD_DrawLine(px0,py0,px1,py1,color);
}畫粗線
void LCD_DrawBLine0(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2,uint8_t size,uint16_t color)
{
uint16_t t;
uint16_t xerr=0,yerr=0,delta_x,delta_y,distance;
uint16_t incx,incy,uRow,uCol;
if(x1<size|| x2<size||y1<size|| y2<size)return;
delta_x=x2-x1; //計算坐標增量
delta_y=y2-y1;
uRow=x1;
uCol=y1;
if(delta_x>0)incx=1; //設定單步方向
else if(delta_x==0)incx=0;//垂直線
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if(delta_y==0)incy=0;//水平線
else{incy=-1;delta_y=-delta_y;}
if( delta_x>delta_y)distance=delta_x; //選取基本增量坐標軸
else distance=delta_y;
for(t=0;t<=distance+1;t++ )//畫線輸出
{
LCD_Draw_FillCircle(uRow,uCol,size,color);//畫點
xerr+=delta_x ;
yerr+=delta_y ;
if(xerr>distance){xerr-=distance;uRow+=incx;}
if(yerr>distance){yerr-=distance;uCol+=incy;}
}
} 畫粗線2,線粗只支持0-2
void LCD_DrawBLine1(uint16_t x0,uint16_t y0,uint16_t x1,uint16_t y1,uint8_t size,uint16_t color)
{
int t;
int xerr=0,yerr=0,delta_x,delta_y,distance;
int incx,incy,uRow,uCol;
delta_x=x1-x0; //計算坐標增量
delta_y=y1-y0;
uRow=x0;
uCol=y0;
if(delta_x>0)incx=1; //設定單步方向
else if(delta_x==0)incx=0;//垂直線
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if(delta_y==0)incy=0;//水平線
else{incy=-1;delta_y=-delta_y;}
if( delta_x>delta_y)distance=delta_x; //選取基本增量坐標軸
else distance=delta_y;
for(t=0;t<=distance+1;t++ ){//畫線輸出
if(size==0)LCD_DrawPoint(uRow,uCol,color);//畫點
if(size==1){
LCD_DrawPoint(uRow,uCol,color);//畫點
LCD_DrawPoint(uRow+1,uCol,color);//畫點
LCD_DrawPoint(uRow,uCol+1,color);//畫點
LCD_DrawPoint(uRow+1,uCol+1,color);//畫點
}
if(size==2){
LCD_DrawPoint(uRow,uCol,color);//畫點
LCD_DrawPoint(uRow+1,uCol,color);//畫點
LCD_DrawPoint(uRow,uCol+1,color);//畫點
LCD_DrawPoint(uRow+1,uCol+1,color);//畫點
LCD_DrawPoint(uRow-1,uCol+1,color);//畫點
LCD_DrawPoint(uRow+1,uCol-1,color);//畫點
LCD_DrawPoint(uRow-1,uCol-1,color);//畫點
LCD_DrawPoint(uRow-1,uCol,color);//畫點
LCD_DrawPoint(uRow,uCol-1,color);//畫點
}
xerr+=delta_x ;
yerr+=delta_y ;
if(xerr>distance) {
xerr-=distance;
uRow+=incx;
}
if(yerr>distance) {
yerr-=distance;
uCol+=incy;
}
}
}畫三角形
// 畫三角形
void LCD_DrawTriangel(uint16_t x0,uint16_t y0,uint16_t x1,uint16_t y1,uint16_t x2,uint16_t y2,uint16_t color)
{
LCD_DrawLine(x0,y0,x1,y1,color);
LCD_DrawLine(x1,y1,x2,y2,color);
LCD_DrawLine(x2,y2,x0,y0,color);
}畫實心三角形
// 畫實心三角形
void LCD_DrawFillTriangel(uint16_t x0,uint16_t y0,uint16_t x1,uint16_t y1,uint16_t x2,uint16_t y2,uint16_t color)
{
uint16_t a, b, y, last;
int dx01, dy01, dx02, dy02, dx12, dy12;
long sa = 0;
long sb = 0;
if (y0 > y1) {
LCD_Swap(&y0,&y1);
LCD_Swap(&x0,&x1);
}
if (y1 > y2) {
LCD_Swap(&y2,&y1);
LCD_Swap(&x2,&x1);
}
if (y0 > y1) {
LCD_Swap(&y0,&y1);
LCD_Swap(&x0,&x1);
}
if(y0 == y2) {
a = b = x0;
if(x1 < a){
a = x1;
}else if(x1 > b){
b = x1;
}
if(x2 < a){
a = x2;
}else if(x2 > b){
b = x2;
}
LCD_DrawFillRectangle(a,y0,b,y0,color);
return;
}
dx01 = x1 - x0;
dy01 = y1 - y0;
dx02 = x2 - x0;
dy02 = y2 - y0;
dx12 = x2 - x1;
dy12 = y2 - y1;
if(y1 == y2){
last = y1;
}else{
last = y1-1;
}
for(y=y0; y<=last; y++) {
a = x0 + sa / dy01;
b = x0 + sb / dy02;
sa += dx01;
sb += dx02;
if(a > b){
LCD_Swap(&a,&b);
}
LCD_DrawFillRectangle(a,y,b,y,color);
}
sa = dx12 * (y - y1);
sb = dx02 * (y - y0);
for(; y<=y2; y++) {
a = x1 + sa / dy12;
b = x0 + sb / dy02;
sa += dx12;
sb += dx02;
if(a > b){
LCD_Swap(&a,&b);
}
LCD_DrawFillRectangle(a,y,b,y,color);
}
}畫矩形
// 畫矩形
void LCD_DrawRectangle(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2,uint16_t color)
{
LCD_DrawLine(x1,y1,x2,y1,color);
LCD_DrawLine(x1,y1,x1,y2,color);
LCD_DrawLine(x1,y2,x2,y2,color);
LCD_DrawLine(x2,y1,x2,y2,color);
} 畫實心矩形
// 實心矩形
void LCD_DrawFillRectangle(uint16_t sx,uint16_t sy,uint16_t ex,uint16_t ey,uint16_t color)
{
uint16_t i,j;
uint16_t width=ex-sx+1; //得到填充的寬度
uint16_t height=ey-sy+1; //高度
LCD_SetWindows(sx,sy,ex,ey);//設定顯示視窗
for(i=0;i<height;i++){
for(j=0;j<width;j++)
LCD_WriteDate16(color); //寫入資料
}
LCD_SetWindows(0,0,LCD_Width-1,LCD_Height-1);//恢復視窗設定為全屏
}顯示單個字符
// 顯示單個字符
void LCD_ShowChar(uint16_t x,uint16_t y,uint16_t bcolor,uint16_t fcolor, uint8_t ch,uint8_t size,uint8_t mode)
{
uint8_t temp,pos,t;
ch=ch-' ';//得到偏移后的值
LCD_SetWindows(x,y,x+size/2-1,y+size-1);//設定單個文字顯示視窗
if(!mode){ //非疊加方式
for(pos=0;pos<size;pos++){
if(size==12)temp=asc2_1206[ch][pos];//呼叫1206字體
else temp=asc2_1608[ch][pos]; //呼叫1608字體
for(t=0;t<size/2;t++){
if(temp&0x01)LCD_WriteDate16(fcolor);
else LCD_WriteDate16(bcolor);
temp>>=1;
}
}
}else{//疊加方式
for(pos=0;pos<size;pos++){
if(size==12)temp=asc2_1206[ch][pos];//呼叫1206字體
else temp=asc2_1608[ch][pos]; //呼叫1608字體
for(t=0;t<size/2;t++){
if(temp&0x01)LCD_DrawPoint(x+t,y+pos,fcolor);//畫一個點
temp>>=1;
}
}
}
LCD_SetWindows(0,0,LCD_Width-1,LCD_Height-1);//恢復視窗為全屏
}顯示字串
// 顯示字串
void LCD_ShowString(uint16_t x,uint16_t y,uint16_t bcolor,uint16_t fcolor,uint8_t size,char *p,uint8_t mode)
{
while((*p<='~')&&(*p>=' ')){//判斷是不是非法字符!
if(x>(LCD_Width-1)||y>(LCD_Height-1))
return;
LCD_ShowChar(x,y,bcolor,fcolor,*p,size,mode);
x+=size/2;
p++;
}
} 顯示數字
// 顯示數字
void LCD_ShowNum(uint16_t x,uint16_t y,uint16_t bcolor,uint16_t fcolor,uint32_t num,uint8_t len,uint8_t size)
{
uint8_t t,temp,enshow=0;
for(t=0;t<len;t++){
temp=(num/LCD_pow(10,len-t-1))%10;
if(enshow==0&&t<(len-1)){
if(temp==0){
LCD_ShowChar(x+(size/2)*t,y,bcolor,fcolor,' ',size,0);
continue;
}else enshow=1;
}
LCD_ShowChar(x+(size/2)*t,y,bcolor,fcolor,temp+'0',size,0);
}
} 顯示圖片
//顯示40*40 QQ圖片
void LCD_Drawbmp16(uint16_t x,uint16_t y,const unsigned char *p)
{
int i;
unsigned char picH,picL;
LCD_SetWindows(x,y,x+40-1,y+40-1);//視窗設定
for(i=0;i<40*40;i++)
{
picL=*(p+i*2); //資料低位在前
picH=*(p+i*2+1);
LCD_WriteDate16(picH<<8|picL);
}
LCD_SetWindows(0,0,LCD_Width-1,LCD_Height-1);//恢復視窗為全屏
}三、下載測驗
打開ESP-IDF Command Prompt
cd命令進入此工程目錄
cd F:\ESP32_DevBoard_File\23_LCD_Test查看電腦設備管理器中開發板的串口號
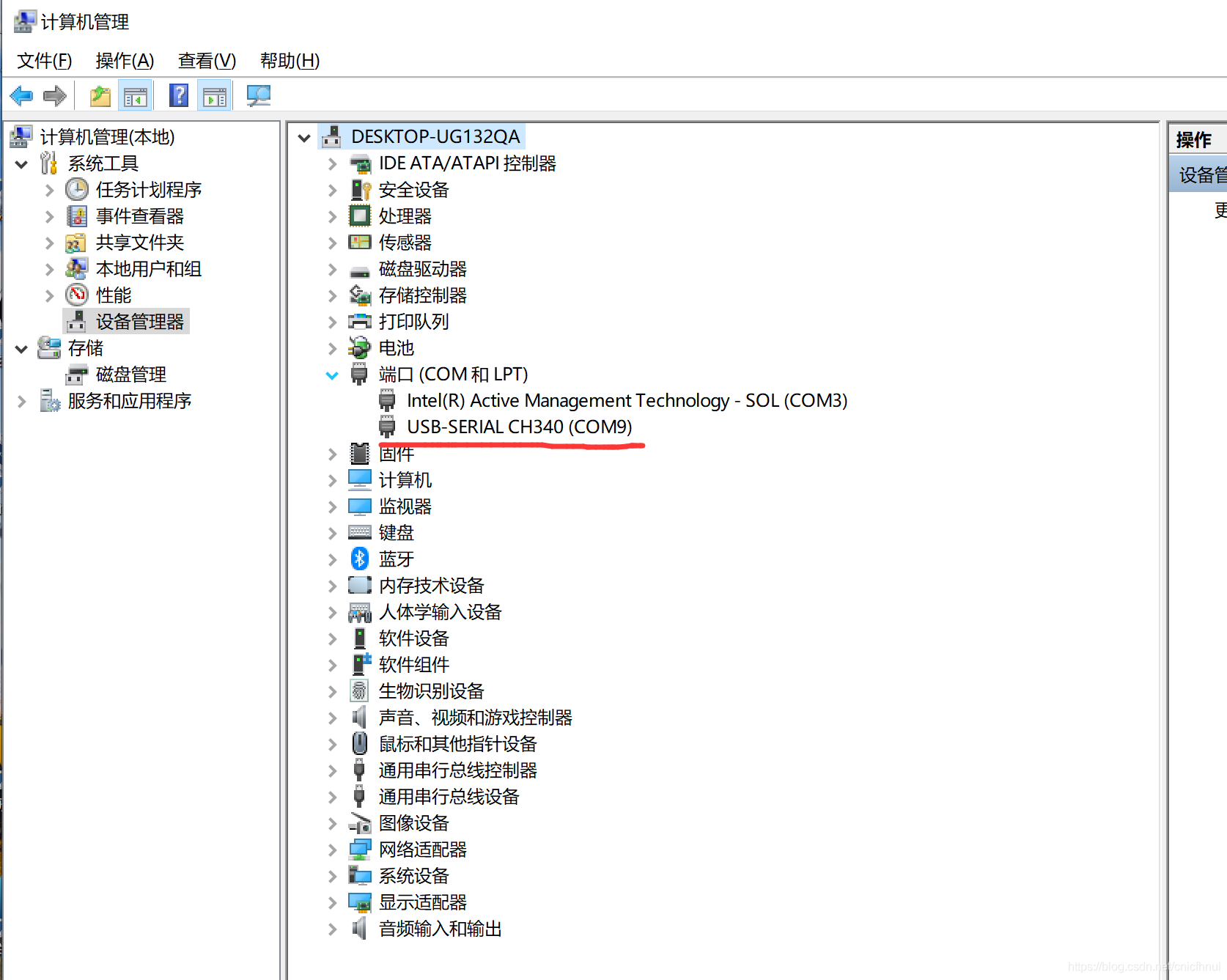
執行idf.py -p COM9 flash monitor從串口9下載并運行打開口顯示設備除錯資訊 Ctrl+c退出運行
顯示效果如下
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/80068.html
標籤:其他
下一篇:Eclipse構建Github