1. torch.nn.Unfold(kernel_size, dilation=1, padding=0, stride=1)
torch.nn.Unfold按照官方的說法,既從一個batch的樣本中,提取出滑動的區域區域塊,也就是卷積操作中的提取kernel filter對應的滑動視窗,
1)由上可知,torch.nn.Unfold的引數跟nn.Conv2d的引數很相似,即,kernel_size(卷積核的尺寸),dilation(空洞大小),padding(填充大小)和stride(步長),
2)官方解釋中:unfold的輸入為( N, C, H, W),其中N為batch_size,C是channel個數,H和W分別是channel的長寬,則unfold的輸出為( N,
C
×
π
(
k
e
r
n
e
l
_
s
i
z
e
)
C\times\pi (kernel\_size)
C×π(kernel_size), L),其中
π
(
k
e
r
n
e
l
_
s
i
z
e
)
\pi (kernel \_size)
π(kernel_size)為kernel_size長和寬的乘積, L是channel的長寬根據kernel_size的長寬滑動裁剪后,得到的區塊的數量,
3)例如:輸入(1, 2, 4, 4),假設kernel_size = (2, 2),stride = 2,根據官方給出的L計算公式

其中d是channel的維度,二維影像既長寬的維度,則得到L(區塊數量)為 :
 每個區塊的大小為 C
×
\times
× kernel_size[ 0 ]
×
\times
× kernel_size[ 1 ] ,既 2 × 2 × 2 = 8,作為輸出的第二個維度,
每個區塊的大小為 C
×
\times
× kernel_size[ 0 ]
×
\times
× kernel_size[ 1 ] ,既 2 × 2 × 2 = 8,作為輸出的第二個維度,
4) 代碼展示:
inputs = torch.randn(1, 2, 4, 4)
print(inputs.size())
print(inputs)
unfold = torch.nn.Unfold(kernel_size=(2, 2), stride=2)
patches = unfold(inputs)
print(patches.size())
print(patches)
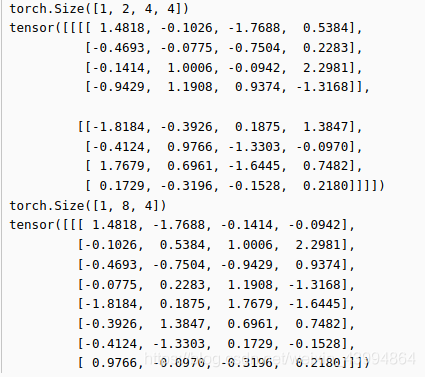
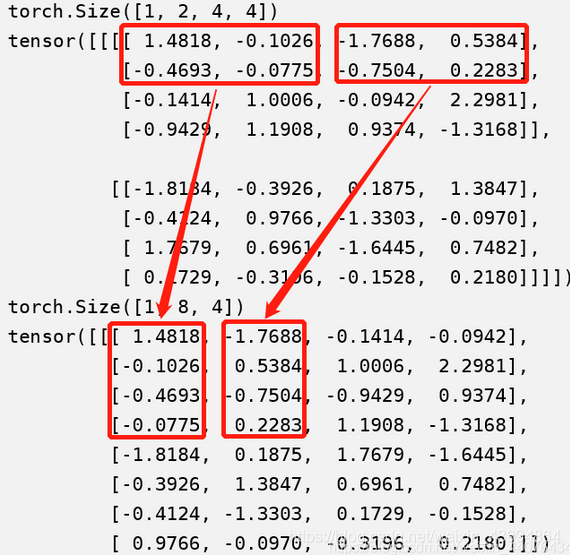
5)對代碼結果分析,nn.Unfold對輸入channel的每一個kernel_size[ 0 ]
×
\times
× kernel_size[ 1 ] 的滑動視窗區塊做了展平操作,
2. torch.nn.Fold(output_size, kernel_size, dilation=1, padding=0, stride=1)
torch.nn.Fold的操作與Unfold相反,將提取出的滑動區域區域塊還原成batch的張量形式,
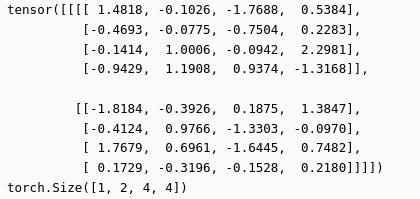
1)代碼如下:
fold = torch.nn.Fold(output_size=(4, 4), kernel_size=(2, 2), stride=2)
inputs_restore = fold(patches)
print(inputs_restore)
print(inputs_restore.size())
2)代碼分析:Fold的操作通過設定output_size=(4, 4),完成與Unfold的互逆的操作,
借鑒博文:https://blog.csdn.net/weixin_44076434/article/details/106545037?utm_medium=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromBaidu-1.control&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromBaidu-1.control
轉載請註明出處,本文鏈接:https://www.uj5u.com/qukuanlian/234949.html
標籤:區塊鏈