高翔視覺SLAM14講學習筆記-第7講
- 特征點法
- ORB特征
- 實踐:特征提取和匹配
特征點法
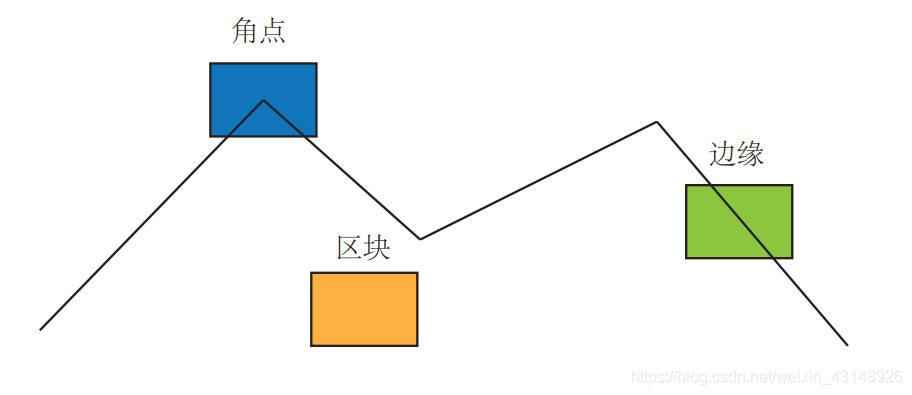
特征點:就是影像中有代表性的點,影像中一些特別的地方,如角點(角點就是角的點)、邊緣、區塊等,
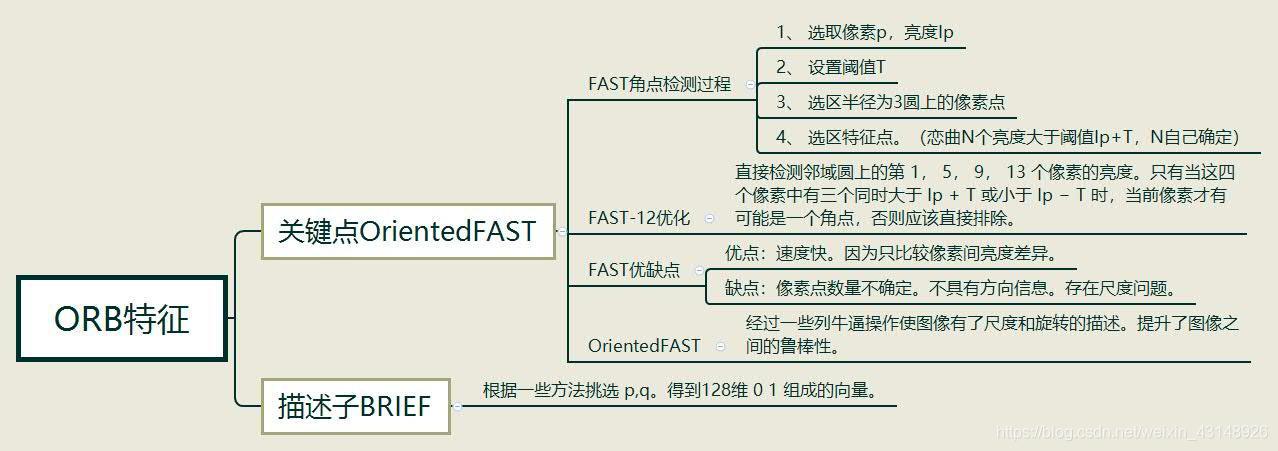
ORB特征
實踐:特征提取和匹配
暴力匹配運算量大,程式中使用的是快速最鄰近演算法(FLANN),
/*
if ( argc != 3 )
{
cout<<"usage: feature_extraction img1 img2"<<endl;
return 1;
// argc 為執行程式時的輸入引數,程式在Linux終端執行時,執行 ./feature_extraction 1.png 2.png 共3個引數,在kde中執行時,可自行修改成以下,
}
//-- 讀取影像
Mat img_1 = imread ( argv[1], CV_LOAD_IMAGE_COLOR );
Mat img_2 = imread ( argv[2], CV_LOAD_IMAGE_COLOR );
// Mat類:自動分配記憶體,釋放記憶體 圖片資訊為2維,大小為480*(640*3)
*/
Mat img_1 = imread ( "圖片路徑/1.png", CV_LOAD_IMAGE_COLOR );
Mat img_2 = imread ( "圖片路徑/2.png", CV_LOAD_IMAGE_COLOR );
//-- 初始化
std::vector<KeyPoint> keypoints_1, keypoints_2;
//定義兩個Vector容器,存放KeyPoint型別,
// 準備存放兩張圖中的特征點的,
Mat descriptors_1, descriptors_2;
Ptr<FeatureDetector> detector = ORB::create();
Ptr<DescriptorExtractor> descriptor = ORB::create();
// Ptr<FeatureDetector> detector = FeatureDetector::create(detector_name);
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create(descriptor_name);
Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create ( "BruteForce-Hamming" );
// 三個智能指標,智能指標:會主動釋放記憶體,防止記憶體泄漏,
第一步,detect函式
//-- 第一步:檢測 Oriented FAST 角點位置
detector->detect ( img_1,keypoints_1 );
detector->detect ( img_2,keypoints_2 );
// detect函式,分析像素,將特征點存于容器keypoints中,兩個引數,輸入和輸出,第三個引數先不管,
//-- 第二步:根據角點位置計算 BRIEF 描述子
descriptor->compute ( img_1, keypoints_1, descriptors_1 );
descriptor->compute ( img_2, keypoints_2, descriptors_2 );
//compute函式:對Keypoint中的每個像素點進行描述子的計算,存于Mat類中的descriptor中,
// 通過cout<<descriptors_1<<endl 可以在終端列印描述子, 書上說BRIEF描述子由 01 組成,但列印出來的是0-255之間的矩真,不知道為啥,
Mat outimg1;
drawKeypoints( img_1, keypoints_1, outimg1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
imshow("ORB特征點",outimg1);
// DrawKeypoint函式 新定義一個Mat類變數,將特征點img_1畫出來并存為一個新影像進行展示,呼叫了drawKeypoint函式
// 使用默認值將img_1于keypoint_1中存盤的特征點進行圈畫,
//-- 第三步:對兩幅影像中的BRIEF描述子進行匹配,使用 Hamming 距離
vector<DMatch> matches;
//BFMatcher matcher ( NORM_HAMMING );
matcher->match ( descriptors_1, descriptors_2, matches );
定義容器,型別為cv::DMatch, DMatch型別變數用來存盤特征點之間的匹配情況,每個變數有四個成員對影像內的索引,分別是所選中的特征點所對應的keypoint容器中對應的標號,Distance代表特征點之間的距離,使用漢明距離,距離越小越好,
使用match函式將descriptors 1,2 進行相似度匹配,存于matches容器中,
這兒就宣告了兩個double型別的數,
//-- 第四步:匹配點對篩選
double min_dist=10000, max_dist=0;
基本語法比較好理解,遍歷所有的匹配點,并找出最小距離和最大距離,存到剛才的兩個double型別函式中,
//找出所有匹配之間的最小距離和最大距離, 即是最相似的和最不相似的兩組點之間的距離
for ( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = matches[i].distance;
if ( dist < min_dist ) min_dist = dist;
if ( dist > max_dist ) max_dist = dist;
}
printf ( "-- Max dist : %f \n", max_dist );
printf ( "-- Min dist : %f \n", min_dist );
//當描述子之間的距離大于兩倍的最小距離時,即認為匹配有誤.但有時候最小距離會非常小,設定一個經驗值30作為下限.
std::vector< DMatch > good_matches;
for ( int i = 0; i < descriptors_1.rows; i++ )
{
if ( matches[i].distance <= max ( 2*min_dist, 30.0 ) )
{
good_matches.push_back ( matches[i] );
}
}
//-- 第五步:繪制匹配結果
Mat img_match;
Mat img_goodmatch;
drawMatches ( img_1, keypoints_1, img_2, keypoints_2, matches, img_match );
drawMatches ( img_1, keypoints_1, img_2, keypoints_2, good_matches, img_goodmatch );
drawMatches函式,對兩張圖片之間的特征點匹配對進行連線與拼接, 將兩張圖拼接成一張圖,存入Mat型別的img_match中,
imshow ( "所有匹配點對", img_match );
imshow ( "優化后匹配點對", img_goodmatch );
waitKey(0);
我是初學者,錯誤肯定很多,請大家指正,謝謝啦
轉載請註明出處,本文鏈接:https://www.uj5u.com/qukuanlian/259290.html
標籤:區塊鏈