1、配置環境、安裝ROS ubuntu16.04 + kinetic
2、安裝依賴 cmake opencv Eigen3:
sudo apt-get install libeigen3-dev3、創建catkin_ws 檔案夾,并ROS初始化作業空間
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make
4、git或者手動下載ORB-SLAM2的源代碼
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
5、配置ORB-SLAM2的ROS路徑
vim或者gedti .bahsrc
寫如路徑
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS
source /opt/ros/kinetic/setup.bash
PATH:改為自己的ORB-SLAM2檔案夾的路徑 /home/zz/catkin_ws/src
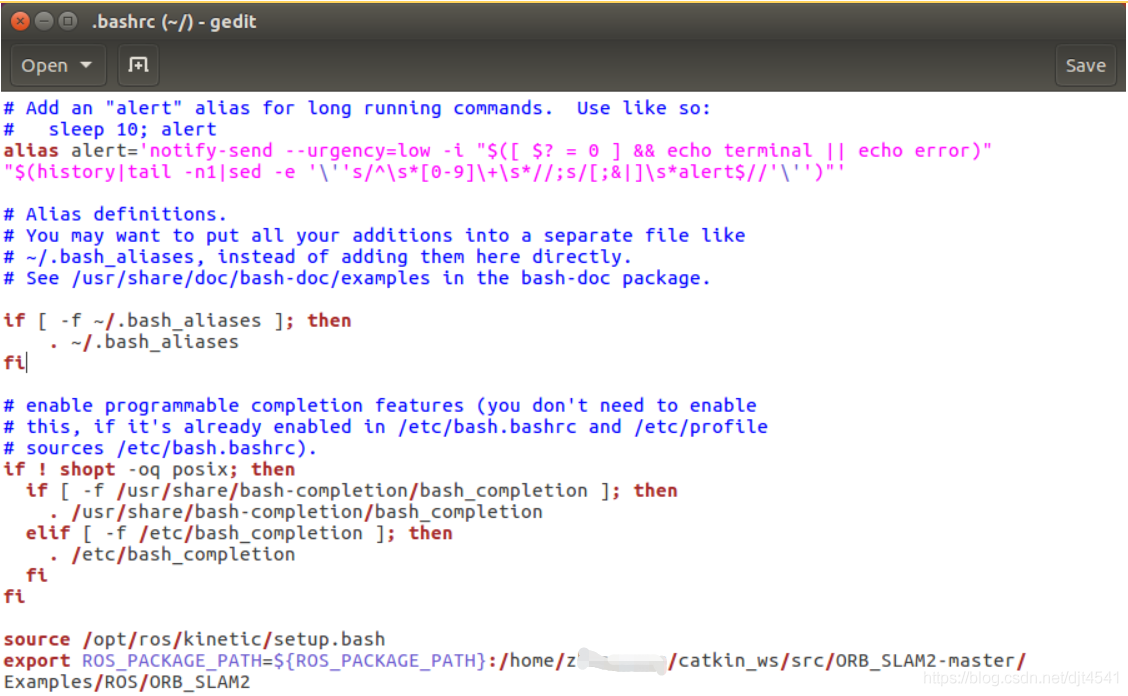
6、source .bashrc 使環境生效
7、下載usbc_cam驅動攝像頭安裝包
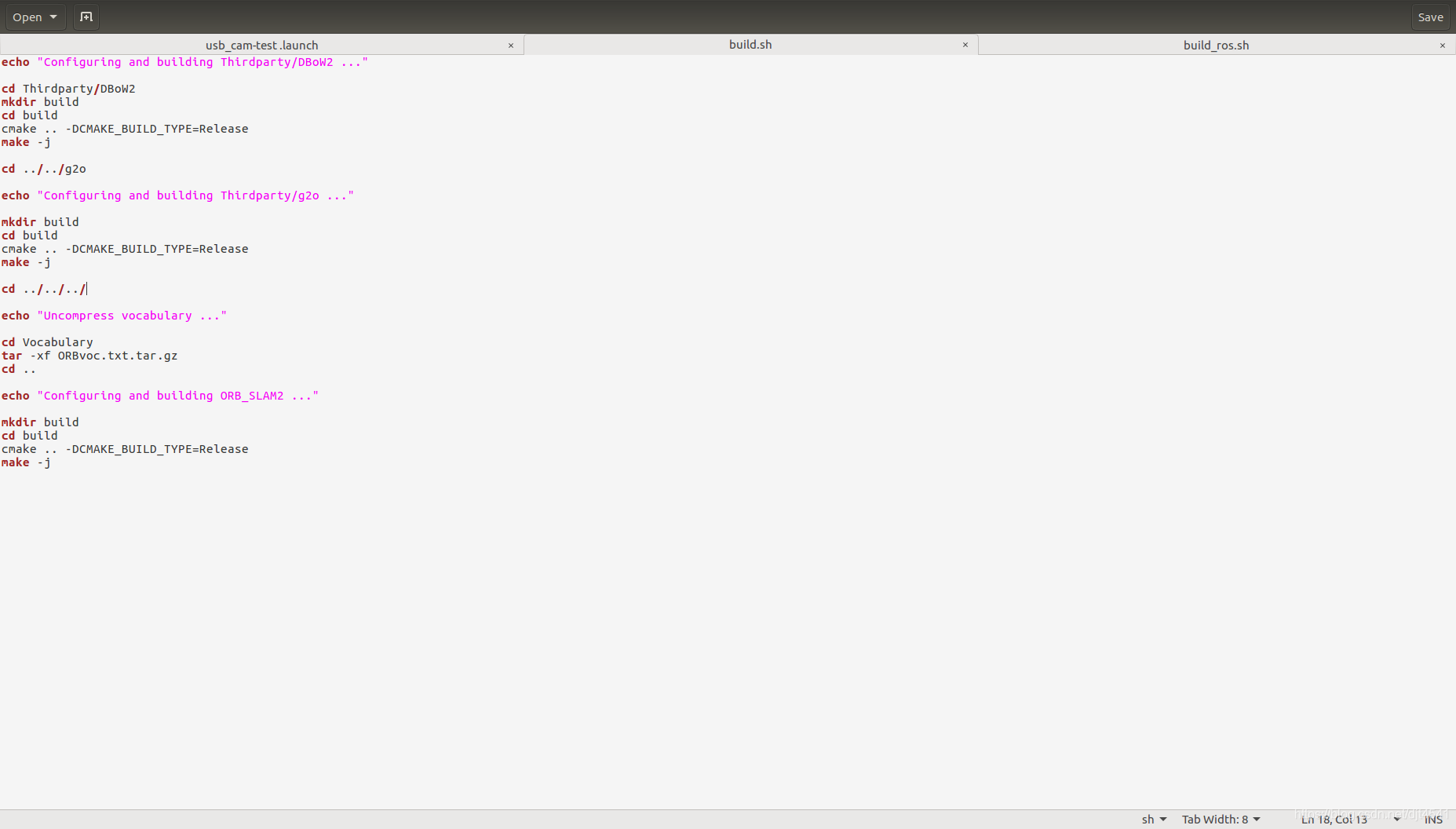
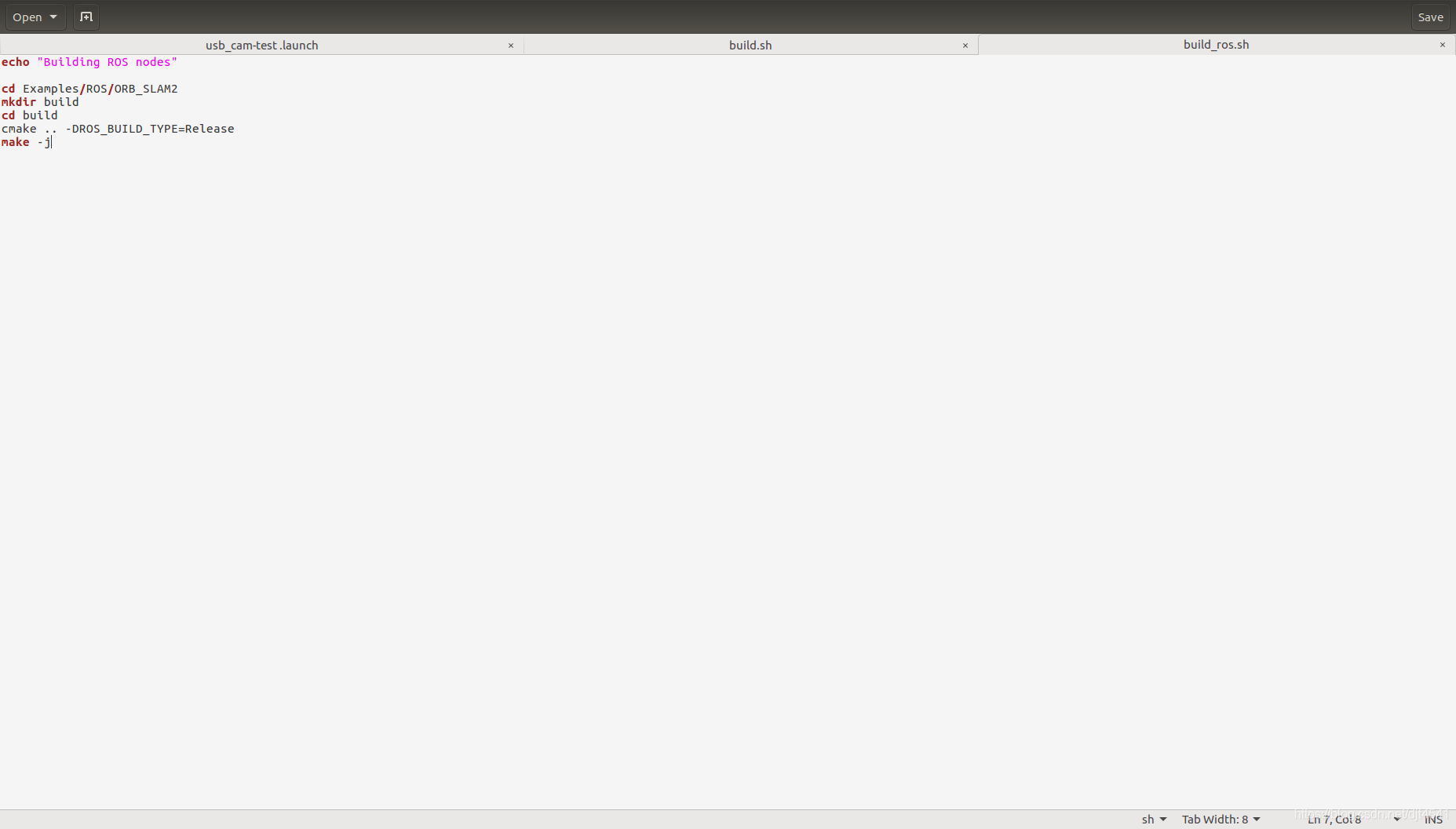
8、編譯ORB-SLAM2 的演算法庫和ROS可執行程式
編譯ORB-SLAM2演算法庫 sudo ./build.sh
編譯ROS程式 sudo ./build_ros.sh
9、開三個視窗分別運行
roscore
roslaunch usb_cam usb_cam-test.launch
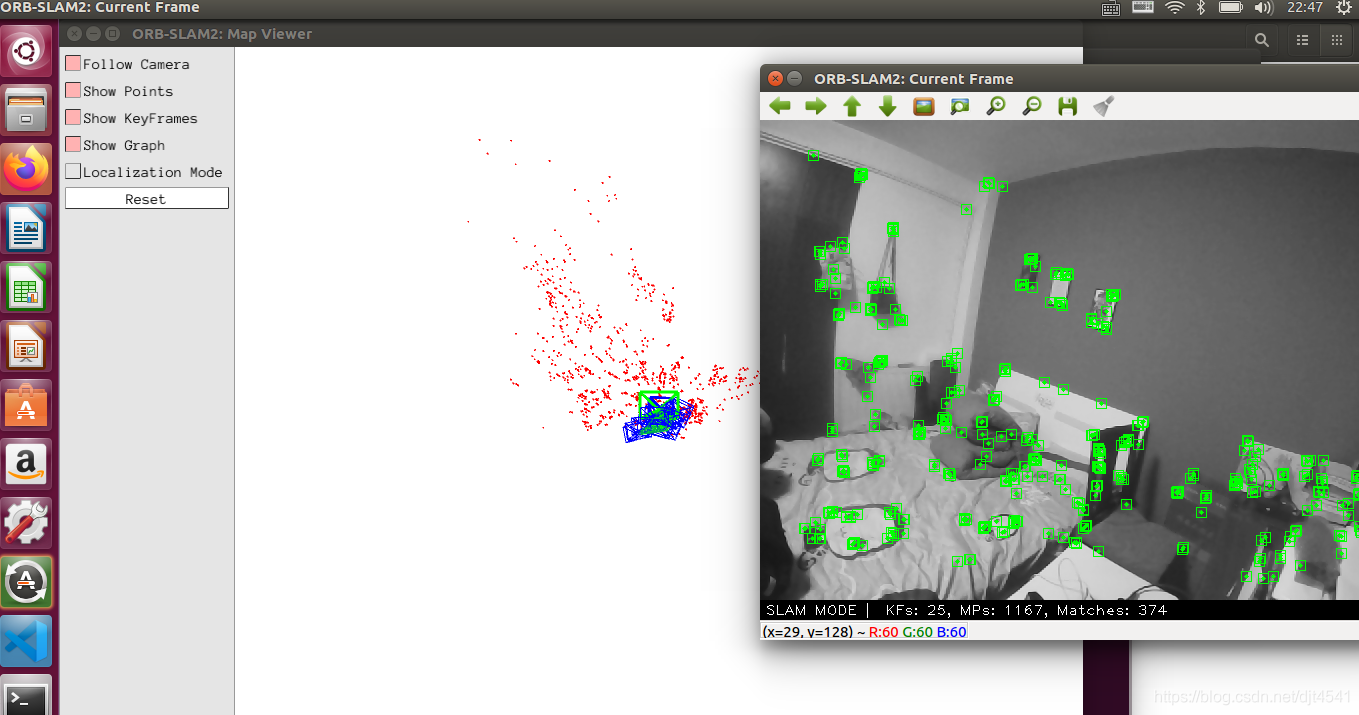
rosrun ORB_SLAM2 Mono /home/zz/catkin_ws/src/ORB_SLAM2-master/Vocabulary/ORBvoc.txt /home/zz/catkin_ws/src/ORB_SLAM2-master/Examples/Monocular/TUM1.yaml
10、實際效果
轉載請註明出處,本文鏈接:https://www.uj5u.com/qukuanlian/265980.html
標籤:區塊鏈
下一篇:2021-03-03