基于mpu9250/9150固定翼無人機加速度計融合、地磁融合,四元數、歐拉角解算的模塊
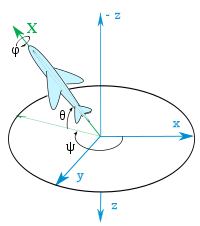
1、提供3軸(roll,pitch,yaw)無漂移的我做好的串口輸出成品板(含mpu9150/9250模塊和串口通訊)給讀者,第二種演算法已燒寫在成品板上,讀者可在arduion或stm32中呼叫我寫好的例子中串口資料決議函式,即可得到穩定的3軸資料,精度上3軸漂移指標只有0.05%,達到了軍用級別,可以應用于固定翼無人機、工業機器人控制,(需要請加我微信13980207249,驗證時注明 無人機),
2、演算法代碼全部我自己寫的,不呼叫芯片廠家mpl庫,以后有廠家的芯片不提供了,換家廠家芯片移植代碼就行了,
3、提供3軸(roll,pitch,yaw)和p0,p1,p2,p3 4元數 無漂移的穩定串口輸出,內含卡爾曼濾波,提供arduion或stm32訪問例子程式,讀者可以直接用,減低編程作業量和除錯作業量,節約自己的開發時間,
3、現在電路板正在打樣和實驗,估計一個月內生產能向大家提供成品板(這次共200塊),
4、可以通過我微信13980207249購買,
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/157043.html
標籤:python
上一篇:一個51程式設計和仿真——流水燈