該系列文章是講解Python OpenCV影像處理知識,前期主要講解影像入門、OpenCV基礎用法,中期講解影像處理的各種演算法,包括影像銳化算子、影像增強技術、影像分割等,后期結合深度學習研究影像識別、影像分類應用,希望文章對您有所幫助,如果有不足之處,還請海涵~
在影像收集和傳輸程序中,可能會受一些外界因素造成影像模糊和有噪聲的情況,從而影響到后續的影像處理和識別,此時可以通過影像銳化和邊緣檢測,加強原影像的高頻部分,銳化突出影像的邊緣細節,改善影像的對比度,使模糊的影像變得更清晰,影像銳化和邊緣檢測主要包括一階微分銳化和二階微分銳化,本文主要講解常見的影像銳化和邊緣檢測方法,包括Roberts算子、Prewitt算子、Sobel算子、Laplacian算子、Canny算子、LOG算子等,萬字長文整理,希望對您有所幫助,
同時,該部分知識均為作者查閱資料撰寫總結,并且開設成了收費專欄,為小寶賺點奶粉錢,感謝您的抬愛,如果有問題隨時私聊我,只望您能從這個系列中學到知識,一起加油喔~
代碼下載地址(如果喜歡記得star,一定喔):
- https://github.com/eastmountyxz/ImageProcessing-Python
文章目錄
- 一.原理概述
- 1.一階微分算子
- 2.二階微分算子
- 二.Roberts算子
- 三.Prewitt算子
- 四.Sobel算子
- 五.Laplacian算子
- 六.Scharr算子
- 七.Canny算子
- 八.LOG算子
- 九.總結
前文參考:
- [Python影像處理] 一.影像處理基礎知識及OpenCV入門函式
- [Python影像處理] 二.OpenCV+Numpy庫讀取與修改像素
- [Python影像處理] 三.獲取影像屬性、興趣ROI區域及通道處理
- [Python影像處理] 四.影像平滑之均值濾波、方框濾波、高斯濾波及中值濾波
- [Python影像處理] 五.影像融合、加法運算及影像型別轉換
- [Python影像處理] 六.影像縮放、影像旋轉、影像翻轉與影像平移
- [Python影像處理] 七.影像閾值化處理及演算法對比
- [Python影像處理] 八.影像腐蝕與影像膨脹
- [Python影像處理] 九.形態學之影像開運算、閉運算、梯度運算
- [Python影像處理] 十.形態學之影像頂帽運算和黑帽運算
- [Python影像處理] 十一.灰度直方圖概念及OpenCV繪制直方圖
- [Python影像處理] 十二.影像幾何變換之影像仿射變換、影像透視變換和影像校正
- [Python影像處理] 十三.基于灰度三維圖的影像頂帽運算和黑帽運算
- [Python影像處理] 十四.基于OpenCV和像素處理的影像灰度化處理
- [Python影像處理] 十五.影像的灰度線性變換
- [Python影像處理] 十六.影像的灰度非線性變換之對數變換、伽馬變換
- [Python影像處理] 十七.影像銳化與邊緣檢測之Roberts算子、Prewitt算子、Sobel算子和Laplacian算子
- [Python影像處理] 十八.影像銳化與邊緣檢測之Scharr算子、Canny算子和LOG算子
- [Python影像處理] 十九.影像分割之基于K-Means聚類的區域分割
- [Python影像處理] 二十.影像量化處理和采樣處理及區域馬賽克特效
- [Python影像處理] 二十一.影像金字塔之影像向下取樣和向上取樣
- [Python影像處理] 二十二.Python影像傅里葉變換原理及實作
- [Python影像處理] 二十三.傅里葉變換之高通濾波和低通濾波
- [Python影像處理] 二十四.影像特效處理之毛玻璃、浮雕和油漆特效
- [Python影像處理] 二十五.影像特效處理之素描、懷舊、光照、流年以及濾鏡特效
- [Python影像處理] 二十六.影像分類原理及基于KNN、樸素貝葉斯演算法的影像分類案例
- [Python影像處理] 二十七.OpenGL入門及繪制基本圖形(一)
- [Python影像處理] 二十八.OpenCV快速實作人臉檢測及視頻中的人臉
- [Python影像處理] 二十九.MoviePy視頻編輯庫實作抖音短視頻剪切合并操作
- [Python影像處理] 三十.影像量化及采樣處理萬字詳細總結(推薦)
- [Python影像處理] 三十一.影像點運算處理兩萬字詳細總結(灰度化處理、閾值化處理)
- [Python影像處理] 三十二.傅里葉變換(影像去噪)與霍夫變換(特征識別)萬字詳細總結
- [Python影像處理] 三十三.影像各種特效處理及原理萬字詳解(毛玻璃、浮雕、素描、懷舊、流年、濾鏡等)
- [Python影像處理] 三十四.數字影像處理基礎與幾何圖形繪制萬字詳解(推薦)
- [Python影像處理] 三十五.OpenCV影像處理入門、算數邏輯運算與影像融合(推薦)
- [Python影像處理] 三十六.OpenCV影像幾何變換萬字詳解(平移縮放旋轉、鏡像仿射透視)
- [Python影像處理] 三十七.OpenCV和Matplotlib繪制直方圖萬字詳解(掩膜直方圖、H-S直方圖、黑夜白天判斷)
- [Python影像處理] 三十八.OpenCV影像增強萬字詳解(直方圖均衡化、區域直方圖均衡化、自動色彩均衡化)
- [Python影像處理] 三十九.Python影像分類萬字詳解(貝葉斯影像分類、KNN影像分類、DNN影像分類)
- [Python影像處理] 四十.全網首發Python影像分割萬字詳解(閾值分割、邊緣分割、紋理分割、分水嶺演算法、K-Means分割、漫水填充分割、區域定位)
- [Python影像處理] 四十一.Python影像平滑萬字詳解(均值濾波、方框濾波、高斯濾波、中值濾波、雙邊濾波)
- [Python影像處理] 四十二.Python影像銳化及邊緣檢測萬字詳解(Roberts、Prewitt、Sobel、Laplacian、Canny、LOG)
一.原理概述
由于收集影像資料的器件或傳輸影像的通道存在一些質量缺陷,或者受其他外界因素的影響,使得影像存在模糊和有噪聲的情況,從而影響到影像識別作業的開展,一般來說,影像的能量主要集中在其低頻部分,噪聲所在的頻段主要在高頻段,同時影像邊緣資訊主要集中在其高頻部分,這將導致原始影像在平滑處理之后,影像邊緣和影像輪廓模糊的情況出現,為了減少這類不利效果的影響,就需要利用影像銳化技術,使影像的邊緣變得清晰,

影像銳化處理的目的是為了使影像的邊緣、輪廓線以及影像的細節變得清晰,經過平滑的影像變得模糊的根本原因是影像受到了平均或積分運算,因此可以對其進行逆運算,從而使影像變得清晰,微分運算是求信號的變化率,具有較強高頻分量作用,從頻率域來考慮,影像模糊的實質是因為其高頻分量被衰減,因此可以用高通濾波器來使影像清晰,但要注意能夠進行銳化處理的影像必須有較高的性噪比,否則銳化后影像性噪比反而更低,從而使得噪聲增加比信號還要多,因此一般是先去除或減輕噪聲后再進行銳化處理,這時需要開展影像銳化和邊緣檢測處理,加強原影像的高頻部分,銳化突出影像的邊緣細節,改善影像的對比度,使模糊的影像變得更清晰,
影像銳化和邊緣提取技術可以消除影像中的噪聲,提取影像資訊中用來表征影像的一些變數,為影像識別提供基礎,通常使用灰度差分法對影像的邊緣、輪廓進行處理,將其凸顯,影像銳化的方法分為高通濾波和空域微分法,本文主要介紹:
- Robert算子
- Prewitt算子
- Sobel算子
- Laplacian算子
- Scharr算子
1.一階微分算子
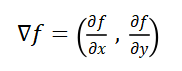
一階微分算子一般借助空域微分算子通過卷積完成,但實際上數字影像處理中求導是利用差分近似微分來進行的,梯度對應一階導數,梯度算子是一階導數算子,對一個連續函式f(x,y),它在位置(x,y)梯度可表示為一個矢量:
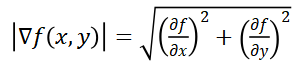
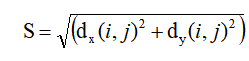
梯度的模值為公式(2)所示,
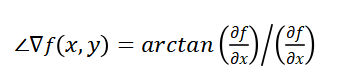
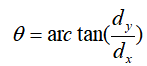
梯度的方向在最大變化率方向上,梯度方向如公式(3)所示,
對于數字影像,導數可以用差分來近似,則梯度可以表示為:

在實際中常用區域模板卷積來近似計算,對水平方向和垂直方向各用一個模板,再通過兩個模板組合起來構成一個梯度算子,根據模板的大小,其中元素值的不同,可以提出多種模板,構成不同的檢測算子,后文中將對各種算子進行詳細介紹,
由梯度的計算可知,在影像灰度變化較大的邊沿區域其梯度值大,在灰度變化平緩的區域梯度值較小,而在灰度均勻的區域其梯度值為零,根據得到的梯度值來回傳像素值,如將梯度值大的像素設定成白色,梯度值小的設定為黑色,這樣就可以將邊緣提取出來了,或者是加強梯度值大的像素灰度值就可以突出細節了達到了銳化的目的,
2.二階微分算子
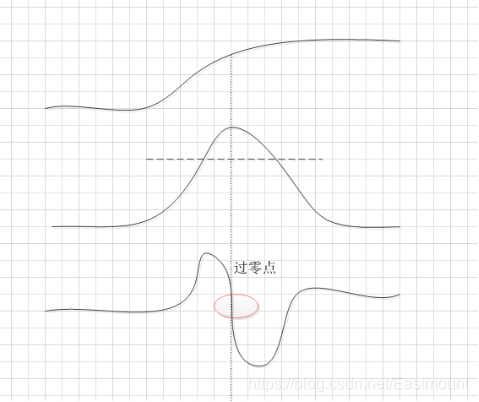
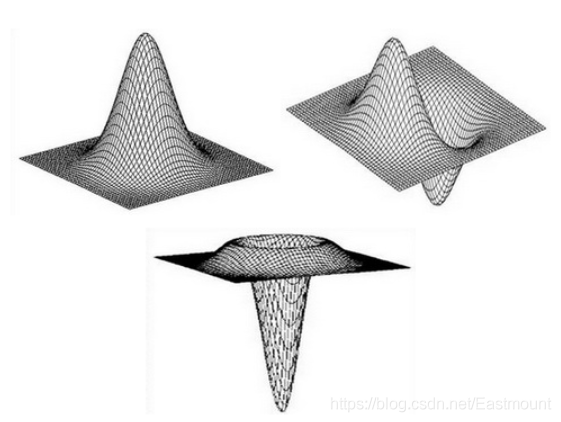
二階微分算子是求影像灰度變化導數的導數,對影像中灰度變化強烈的地方很敏感,從而可以突出影像的紋理結構,當影像灰度變化劇烈時,進行一階微分則會形成一個區域的極值,對影像進行二階微分則會形成一個過零點,并且在零點兩邊產生一個波峰和波谷,設定一個閾值檢測到這個過零點,如圖2所示,
這樣做的好處有兩個,一是二階微分關心的是影像灰度的突變而不強調灰度緩慢變化的區域,對邊緣的定位能力更強;二是Laplacian算子是各向同性的,即具有旋轉不變性,在一階微分里,是用|dx|+|dy|來近似一個點的梯度,當影像旋轉一個角度時,這個值就會變化,但對于Laplacian算子來說,不管影像怎么旋轉,得到的相應值是一樣的,
想要確定過零點要以p為中心的一個3×3領域,p點為過零點意味著至少有兩個相對的領域像素的符號不同,有四種要檢測的情況:左/右、上/下、兩個對角,如果g(x,y)的值與一個閾值比較,那么不僅要求相對領域的符號不同,數值差的絕對值也要超過這個閾值,這時p稱為一個過零點像素,二階微分的定義為:

二階微分在恒定灰度區域的微分值為零,在灰度臺階或斜坡起點處微分值非零,沿著斜坡的微分值為零,與一階微分算子相比較,一階微分算子獲得的邊界是比較粗略的邊界,反映的邊界資訊較少,但是所反映的邊界比較清晰;二階微分算子獲得的邊界是比較細致的邊界,反映的邊界資訊包括了許多的細節資訊,但是所反映的邊界不是太清晰,
二.Roberts算子
Roberts算子又稱為交叉微分演算法,它是基于交叉差分的梯度演算法,通過區域差分計算檢測邊緣線條,常用來處理具有陡峭的低噪聲影像,當影像邊緣接近于正45度或負45度時,該演算法處理效果更理想,其缺點是對邊緣的定位不太準確,提取的邊緣線條較粗,
Roberts算子的模板分為水平方向和垂直方向,如公式(12-6)所示,從其模板可以看出,Roberts算子能較好的增強正負45度的影像邊緣,
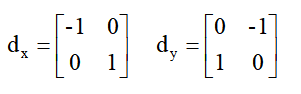
如公式(7)所示,分別表示影像的水平方向和垂直方向的計算公式,
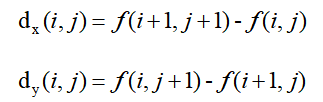
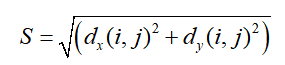
Roberts算子像素的最終計算公式如下:
在Python中,Roberts算子主要通過Numpy定義模板,再呼叫OpenCV的filter2D()函式實作邊緣提取,該函式主要是利用內核實作對影像的卷積運算,其函式原型如下所示:
- dst = filter2D(src, ddepth, kernel[, dst[, anchor[, delta[, borderType]]]])
– src表示輸入影像
– dst表示輸出的邊緣圖,其大小和通道數與輸入影像相同
– ddepth表示目標影像所需的深度
– kernel表示卷積核,一個單通道浮點型矩陣
– anchor表示內核的基準點,其默認值為(-1,-1),位于中心位置
– delta表示在儲存目標影像前可選的添加到像素的值,默認值為0
– borderType表示邊框模式
在進行Roberts算子處理之后,還需要呼叫convertScaleAbs()函式計算絕對值,并將影像轉換為8位圖進行顯示,其演算法原型如下:
- dst = convertScaleAbs(src[, dst[, alpha[, beta]]])
– src表示原陣列
– dst表示輸出陣列,深度為8位
– alpha表示比例因子
– beta表示原陣列元素按比例縮放后添加的值
最后呼叫addWeighted()函式計算水平方向和垂直方向的Roberts算子,其運行代碼如下:
#encoding:utf-8
#By:Eastmount CSDN 2021-07-19
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('lena.png')
lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#Roberts算子
kernelx = np.array([[-1,0],[0,1]], dtype=int)
kernely = np.array([[0,-1],[1,0]], dtype=int)
x = cv2.filter2D(grayImage, cv2.CV_16S, kernelx)
y = cv2.filter2D(grayImage, cv2.CV_16S, kernely)
#轉uint8
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Roberts = cv2.addWeighted(absX,0.5,absY,0.5,0)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示圖形
titles = [u'原始影像', u'Roberts算子']
images = [lenna_img, Roberts]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其運行結果如圖3所示,左邊為原始影像,右邊為Roberts算子影像銳化提取的邊緣輪廓,

三.Prewitt算子
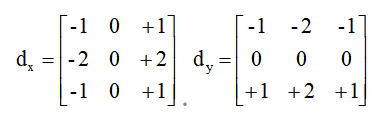
Prewitt是一種影像邊緣檢測的微分算子,其原理是利用特定區域內像素灰度值產生的差分實作邊緣檢測,由于Prewitt算子采用3×3模板對區域內的像素值進行計算,而Robert算子的模板為2×2,故Prewitt算子的邊緣檢測結果在水平方向和垂直方向均比Robert算子更加明顯,Prewitt算子適合用來識別噪聲較多、灰度漸變的影像,其計算公式如下所示,
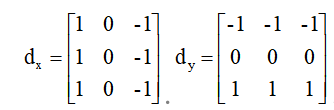
具體的水平和垂直方向計算公式如下所示:

Prewitt算子像素的最終計算如公式(11)所示,

在Python中,Prewitt算子的實作程序與Roberts算子比較相似,通過Numpy定義模板,再呼叫OpenCV的filter2D()函式實作對影像的卷積運算,最終通過convertScaleAbs()和addWeighted()函式實作邊緣提取,代碼如下所示:
#encoding:utf-8
#By:Eastmount CSDN 2021-07-19
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('lena.png')
lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#Prewitt算子
kernelx = np.array([[1,1,1],[0,0,0],[-1,-1,-1]], dtype=int)
kernely = np.array([[-1,0,1],[-1,0,1],[-1,0,1]], dtype=int)
x = cv2.filter2D(grayImage, cv2.CV_16S, kernelx)
y = cv2.filter2D(grayImage, cv2.CV_16S, kernely)
#轉uint8
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Prewitt = cv2.addWeighted(absX,0.5,absY,0.5,0)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示圖形
titles = [u'原始影像', u'Prewitt算子']
images = [lenna_img, Prewitt]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
最終運行結果如圖4所示,左邊為原始影像,右邊為Prewitt算子影像銳化提取的邊緣輪廓,其效果圖的邊緣檢測結果在水平方向和垂直方向均比Robert算子更加明顯,

四.Sobel算子
Sobel算子是一種用于邊緣檢測的離散微分算子,它結合了高斯平滑和微分求導,該算子用于計算影像明暗程度近似值,根據影像邊緣旁邊明暗程度把該區域內超過某個數的特定點記為邊緣,Sobel算子在Prewitt算子的基礎上增加了權重的概念,認為相鄰點的距離遠近對當前像素點的影響是不同的,距離越近的像素點對應當前像素的影響越大,從而實作影像銳化并突出邊緣輪廓,
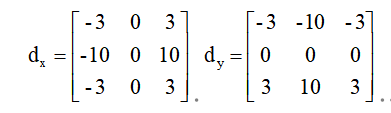
Sobel算子的邊緣定位更準確,常用于噪聲較多、灰度漸變的影像,其演算法模板如公式(12)所示,其中dx表示水平方向,dy表示垂直方向,
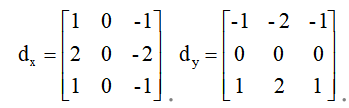
其像素計算公式如下:
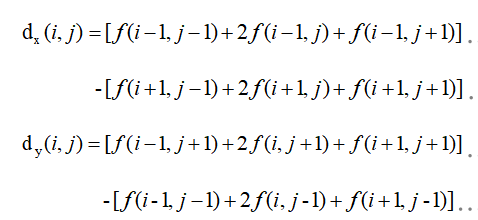
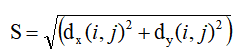
Sobel算子像素的最終計算公式如下:
Sobel算子根據像素點上下、左右鄰點灰度加權差,在邊緣處達到極值這一現象檢測邊緣,對噪聲具有平滑作用,提供較為精確的邊緣方向資訊,因為Sobel算子結合了高斯平滑和微分求導(分化),因此結果會具有更多的抗噪性,當對精度要求不是很高時,Sobel算子是一種較為常用的邊緣檢測方法,
Python和OpenCV將Sobel算子封裝在Sobel()函式中,其函式原型如下所示:
- dst = Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]])
– src表示輸入影像
– dst表示輸出的邊緣圖,其大小和通道數與輸入影像相同
– ddepth表示目標影像所需的深度,針對不同的輸入影像,輸出目標影像有不同的深度
– dx表示x方向上的差分階數,取值1或 0
– dy表示y方向上的差分階數,取值1或0
– ksize表示Sobel算子的大小,其值必須是正數和奇數
– scale表示縮放導數的比例常數,默認情況下沒有伸縮系數
– delta表示將結果存入目標影像之前,添加到結果中的可選增量值
– borderType表示邊框模式,更多詳細資訊查閱BorderTypes
注意,在進行Sobel算子處理之后,還需要呼叫convertScaleAbs()函式計算絕對值,并將影像轉換為8位圖進行顯示,其演算法原型如下:
- dst = convertScaleAbs(src[, dst[, alpha[, beta]]])
– src表示原陣列
– dst表示輸出陣列,深度為8位
– alpha表示比例因子
– beta表示原陣列元素按比例縮放后添加的值
Sobel算子的實作代碼如所示,
#encoding:utf-8
#By:Eastmount CSDN 2021-07-19
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('lena.png')
lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#Sobel算子
x = cv2.Sobel(grayImage, cv2.CV_16S, 1, 0) #對x求一階導
y = cv2.Sobel(grayImage, cv2.CV_16S, 0, 1) #對y求一階導
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示圖形
titles = [u'原始影像', u'Sobel算子']
images = [lenna_img, Sobel]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其運行結果如圖5所示:

五.Laplacian算子
拉普拉斯(Laplacian)算子是n維歐幾里德空間中的一個二階微分算子,常用于影像增強領域和邊緣提取,它通過灰度差分計算鄰域內的像素,基本流程是:判斷影像中心像素灰度值與它周圍其他像素的灰度值,如果中心像素的灰度更高,則提升中心像素的灰度;反之降低中心像素的灰度,從而實作影像銳化操作,在演算法實作程序中,Laplacian算子通過對鄰域中心像素的四方向或八方向求梯度,再將梯度相加起來判斷中心像素灰度與鄰域內其他像素灰度的關系,最后通過梯度運算的結果對像素灰度進行調整,
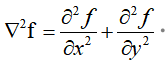
一個連續的二元函式f(x,y),其拉普拉斯運算定義為:
Laplacian算子分為四鄰域和八鄰域,四鄰域是對鄰域中心像素的四方向求梯度,八鄰域是對八方向求梯度,其中,四鄰域模板如公式(16)所示:
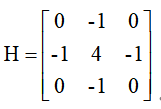
其像素的計算公式可以簡化為:

通過模板可以發現,當鄰域內像素灰度相同時,模板的卷積運算結果為0;當中心像素灰度高于鄰域內其他像素的平均灰度時,模板的卷積運算結果為正數;當中心像素的灰度低于鄰域內其他像素的平均灰度時,模板的卷積為負數,對卷積運算的結果用適當的衰弱因子處理并加在原中心像素上,就可以實作影像的銳化處理,
Laplacian算子的八鄰域模板如下:
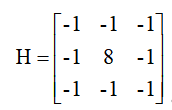
其像素的計算公式可以簡化為:

Python和OpenCV將Laplacian算子封裝在Laplacian()函式中,其函式原型如下所示:
- dst = Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
– src表示輸入影像
– dst表示輸出的邊緣圖,其大小和通道數與輸入影像相同
– ddepth表示目標影像所需的深度
– ksize表示用于計算二階導數的濾波器的孔徑大小,其值必須是正數和奇數,且默認值為1,更多詳細資訊查閱getDerivKernels
– scale表示計算拉普拉斯算子值的可選比例因子,默認值為1,更多詳細資訊查閱getDerivKernels
– delta表示將結果存入目標影像之前,添加到結果中的可選增量值,默認值為0
– borderType表示邊框模式,更多詳細資訊查閱BorderTypes
注意,Laplacian算子其實主要是利用Sobel算子的運算,通過加上Sobel算子運算出的影像x方向和y方向上的導數,得到輸入影像的影像銳化結果,
同時,在進行Laplacian算子處理之后,還需要呼叫convertScaleAbs()函式計算絕對值,并將影像轉換為8位圖進行顯示,其演算法原型如下:
- dst = convertScaleAbs(src[, dst[, alpha[, beta]]])
– src表示原陣列
– dst表示輸出陣列,深度為8位
– alpha表示比例因子
– beta表示原陣列元素按比例縮放后添加的值
當ksize=1時,Laplacian()函式采用3×3的孔徑(四鄰域模板)進行變換處理,下面的代碼是采用ksize=3的Laplacian算子進行影像銳化處理,其代碼如下:
#encoding:utf-8
#By:Eastmount CSDN 2021-07-19
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('lena.png')
lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#拉普拉斯演算法
dst = cv2.Laplacian(grayImage, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示圖形
titles = [u'原始影像', u'Laplacian算子']
images = [lenna_img, Laplacian]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
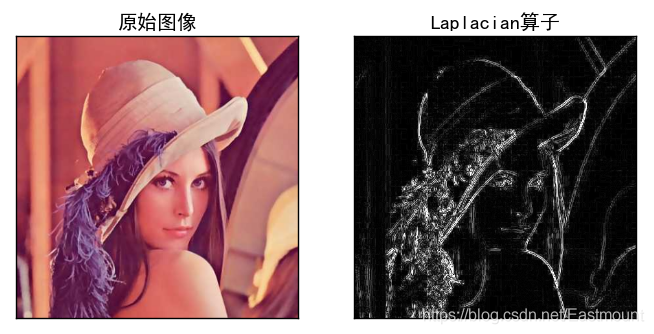
Laplacian算子邊緣提取運行結果如圖6所示:
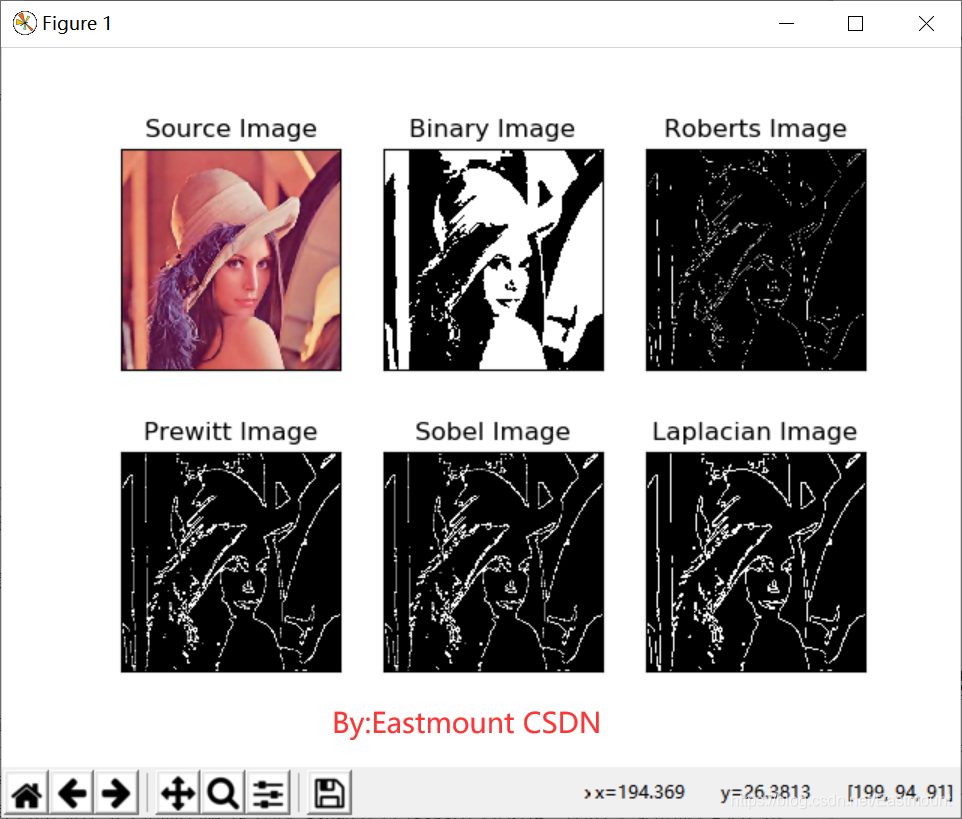
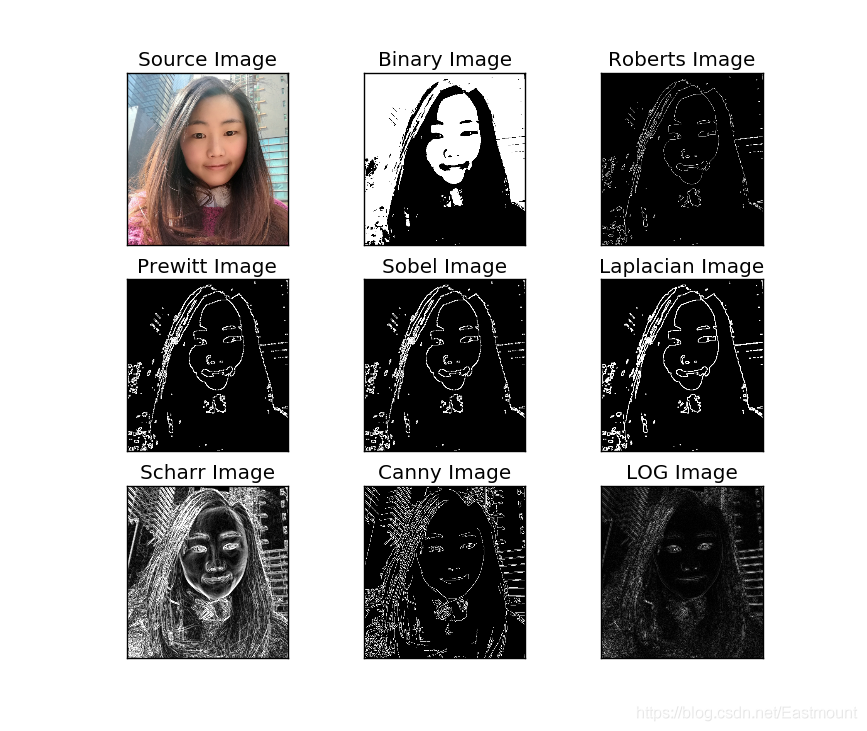
邊緣檢測演算法主要是基于影像強度的一階和二階導數,但導數通常對噪聲很敏感,因此需要采用濾波器來過濾噪聲,并呼叫影像增強或閾值化演算法進行處理,最后再進行邊緣檢測,下面是采用高斯濾波去噪和閾值化處理之后,再進行邊緣檢測的程序,并對比了四種常見的邊緣提取演算法,
#encoding:utf-8
#By:Eastmount CSDN 2021-07-19
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('lena.png')
lenna_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯濾波
gaussianBlur = cv2.GaussianBlur(grayImage, (3,3), 0)
#閾值處理
ret, binary = cv2.threshold(gaussianBlur, 127, 255, cv2.THRESH_BINARY)
#Roberts算子
kernelx = np.array([[-1,0],[0,1]], dtype=int)
kernely = np.array([[0,-1],[1,0]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Roberts = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#Prewitt算子
kernelx = np.array([[1,1,1],[0,0,0],[-1,-1,-1]], dtype=int)
kernely = np.array([[-1,0,1],[-1,0,1],[-1,0,1]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Prewitt = cv2.addWeighted(absX,0.5,absY,0.5,0)
#Sobel算子
x = cv2.Sobel(binary, cv2.CV_16S, 1, 0)
y = cv2.Sobel(binary, cv2.CV_16S, 0, 1)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#拉普拉斯演算法
dst = cv2.Laplacian(binary, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
#效果圖
titles = ['Source Image', 'Binary Image', 'Roberts Image',
'Prewitt Image','Sobel Image', 'Laplacian Image']
images = [lenna_img, binary, Roberts, Prewitt, Sobel, Laplacian]
for i in np.arange(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
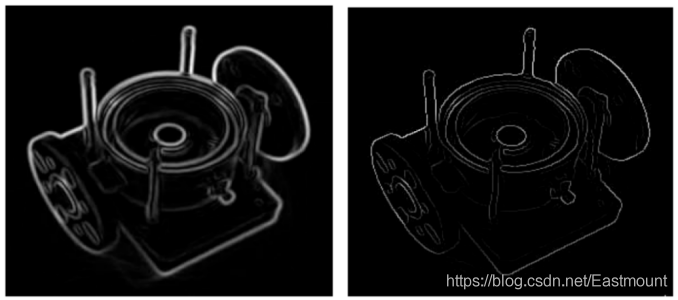
輸出結果如圖7所示,其中,Laplacian算子對噪聲比較敏感,由于其演算法可能會出現雙像素邊界,常用來判斷邊緣像素位于影像的明區或暗區,很少用于邊緣檢測;Robert算子對陡峭的低噪聲影像效果較好,尤其是邊緣正負45度較多的影像,但定位準確率較差;Prewitt算子對灰度漸變的影像邊緣提取效果較好,而沒有考慮相鄰點的距離遠近對當前像素點的影響;Sobel算子考慮了綜合因素,對噪聲較多的影像處理效果更好,
六.Scharr算子
由于Sobel算子在計算相對較小的核的時候,其近似計算導數的精度比較低,比如一個3×3的Sobel算子,當梯度角度接近水平或垂直方向時,其不精確性就越發明顯,Scharr算子同Sobel算子的速度一樣快,但是準確率更高,尤其是計算較小核的情景,所以利用3×3濾波器實作影像邊緣提取更推薦使用Scharr算子,
Scharr算子又稱為Scharr濾波器,也是計算x或y方向上的影像差分,在OpenCV中主要是配合Sobel算子的運算而存在的,其濾波器的濾波系數如下:
Scharr算子的函式原型如下所示,和Sobel算子幾乎一致,只是沒有ksize引數,
- dst = Scharr(src, ddepth, dx, dy[, dst[, scale[, delta[, borderType]]]]])
– src表示輸入影像
– dst表示輸出的邊緣圖,其大小和通道數與輸入影像相同
– ddepth表示目標影像所需的深度,針對不同的輸入影像,輸出目標影像有不同的深度
– dx表示x方向上的差分階數,取值1或 0
– dy表示y方向上的差分階數,取值1或0
– scale表示縮放導數的比例常數,默認情況下沒有伸縮系數
– delta表示將結果存入目標影像之前,添加到結果中的可選增量值
– borderType表示邊框模式,更多詳細資訊查閱BorderTypes
Scharr算子的實作代碼如下所示,
#encoding:utf-8
#By:Eastmount CSDN 2021-07-19
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('lena.png')
lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Scharr算子
x = cv2.Scharr(grayImage, cv2.CV_32F, 1, 0) #X方向
y = cv2.Scharr(grayImage, cv2.CV_32F, 0, 1) #Y方向
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Scharr = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示圖形
titles = [u'原始影像', u'Scharr算子']
images = [lenna_img, Scharr]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其運行結果如圖8所示:

七.Canny算子
John F.Canny于1986年發明了一個多級邊緣檢測演算法——Canny邊緣檢測算子,并創立了邊緣檢測計算理論(Computational theory of edge detection),該理論有效地解釋了這項技術的作業理論,
邊緣檢測通常是在保留原有影像屬性的情況下,對影像資料規模進行縮減,提取影像邊緣輪廓的處理方式,Canny演算法是一種被廣泛應用于邊緣檢測的標準演算法,其目標是找到一個最優的邊緣檢測解或找尋一幅影像中灰度強度變化最強的位置,最優邊緣檢測主要通過低錯誤率、高定位性和最小回應三個標準進行評價,Canny算子的實作步驟如下:
1.使用高斯平滑(如公式21所示)去除噪聲,
2.按照Sobel濾波器步驟計算梯度幅值和方向,尋找影像的強度梯度,先將卷積模板分別作用x和y方向,再計算梯度幅值和方向,其公式如下所示,梯度方向一般取0度、45度、90度和135度四個方向,
3.通過非極大值抑制(Non-maximum Suppression)過濾掉非邊緣像素,將模糊的邊界變得清晰,該程序保留了每個像素點上梯度強度的極大值,過濾掉其他的值,對于每個像素點,它進行如下操作:
- (1)將其梯度方向近似為以下值中的一個,包括0、45、90、135、180、225、270和315,即表示上下左右和45度方向;
- (2)比較該像素點和其梯度正負方向的像素點的梯度強度,如果該像素點梯度強度最大則保留,否則抑制(洗掉,即置為0),其處理后效果如圖9所示,左邊表示梯度值,右邊表示非極大值抑制處理后的邊緣[5],
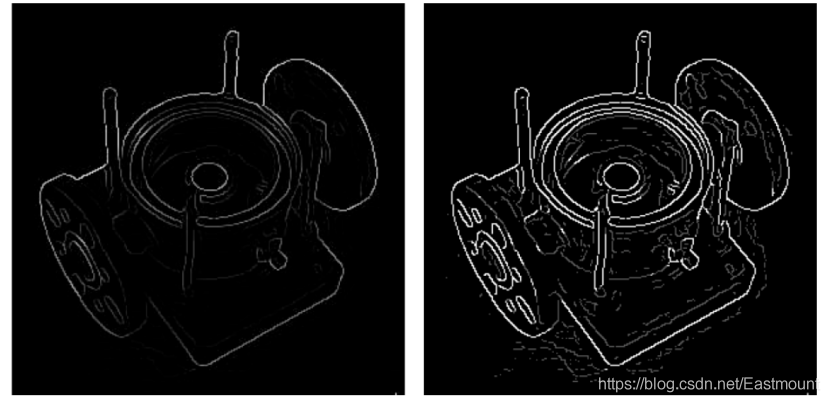
4.利用雙閾值方法來確定潛在的邊界,經過非極大抑制后影像中仍然有很多噪聲點,此時需要通過雙閾值技術處理,即設定一個閾值上界和閾值下界,影像中的像素點如果大于閾值上界則認為必然是邊界(稱為強邊界,strong edge),小于閾值下界則認為必然不是邊界,兩者之間的則認為是候選項(稱為弱邊界,weak edge),經過雙閾值處理的影像如圖10所示,左邊為非極大值抑制處理后的邊緣,右邊為雙閾值技術處理的效果圖,
5.利用滯后技術來跟蹤邊界,若某一像素位置和強邊界相連的弱邊界認為是邊界,其他的弱邊界則被洗掉,
在OpenCV中,Canny()函式原型如下所示:
- edges = Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient]]])
– image表示輸入影像
– edges表示輸出的邊緣圖,其大小和型別與輸入影像相同
– threshold1表示第一個滯后性閾值
– threshold2表示第二個滯后性閾值
– apertureSize表示應用Sobel算子的孔徑大小,其默認值為3
– L2gradient表示一個計算影像梯度幅值的標識,默認值為false
Canny算子的邊緣提取實作代碼如下所示:
#encoding:utf-8
#By:Eastmount CSDN 2021-07-19
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('lena.png')
lenna_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯濾波降噪
gaussian = cv2.GaussianBlur(grayImage, (3,3), 0)
#Canny算子
Canny = cv2.Canny(gaussian, 50, 150)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示圖形
titles = [u'原始影像', u'Canny算子']
images = [lenna_img, Canny]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其運行結果如圖11所示:

八.LOG算子
LOG(Laplacian of Gaussian)邊緣檢測算子是David Courtnay Marr和Ellen Hildreth在1980年共同提出的,也稱為Marr & Hildreth算子,它根據影像的信噪比來求檢測邊緣的最優濾波器,該演算法首先對影像做高斯濾波,然后再求其拉普拉斯(Laplacian)二階導數,根據二階導數的過零點來檢測影像的邊界,即通過檢測濾波結果的零交叉(Zero crossings)來獲得影像或物體的邊緣,
LOG算子綜合考慮了對噪聲的抑制和對邊緣的檢測兩個方面,并且把Gauss平滑濾波器和Laplacian銳化濾波器結合了起來,先平滑掉噪聲,再進行邊緣檢測,所以效果會更好, 該算子與視覺生理中的數學模型相似,因此在影像處理領域中得到了廣泛的應用,它具有抗干擾能力強,邊界定位精度高,邊緣連續性好,能有效提取對比度弱的邊界等特點,
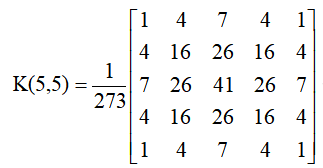
常見的LOG算子是5×5模板,如下所示:
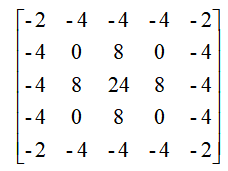
由于LOG算子到中心的距離與位置加權系數的關系曲線像墨西哥草帽的剖面,所以LOG算子也叫墨西哥草帽濾波器,如圖12所示,
LOG算子的邊緣提取實作代碼如下所示:
#encoding:utf-8
#By:Eastmount CSDN 2021-07-19
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('lena.png')
lenna_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#先通過高斯濾波降噪
gaussian = cv2.GaussianBlur(grayImage, (3,3), 0)
#再通過拉普拉斯算子做邊緣檢測
dst = cv2.Laplacian(gaussian, cv2.CV_16S, ksize = 3)
LOG = cv2.convertScaleAbs(dst)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示圖形
titles = [u'原始影像', u'LOG算子']
images = [lenna_img, LOG]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其運行結果如圖13所示:

九.總結
本文主要通過Roberts算子、Prewitt算子、Sobel算子、Laplacian算子、Scharr算子、Canny算子和LOG算子實作影像銳化和邊緣檢測,有效地提取了影像的輪廓,并以彩色“Lena”圖為實體,進行了詳細地實驗處理,
- 一.原理概述
1.一階微分算子
2.二階微分算子 - 二.Roberts算子
- 三.Prewitt算子
- 四.Sobel算子
- 五.Laplacian算子
- 六.Scharr算子
- 七.Canny算子
- 八.LOG算子
最終完整代碼如下:
#encoding:utf-8
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取影像
img = cv2.imread('nv.png')
lenna_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
#灰度化處理影像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯濾波
gaussianBlur = cv2.GaussianBlur(grayImage, (3,3), 0)
#閾值處理
ret, binary = cv2.threshold(gaussianBlur, 127, 255, cv2.THRESH_BINARY)
#Roberts算子
kernelx = np.array([[-1,0],[0,1]], dtype=int)
kernely = np.array([[0,-1],[1,0]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Roberts = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#Prewitt算子
kernelx = np.array([[1,1,1],[0,0,0],[-1,-1,-1]], dtype=int)
kernely = np.array([[-1,0,1],[-1,0,1],[-1,0,1]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Prewitt = cv2.addWeighted(absX,0.5,absY,0.5,0)
#Sobel算子
x = cv2.Sobel(binary, cv2.CV_16S, 1, 0)
y = cv2.Sobel(binary, cv2.CV_16S, 0, 1)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#拉普拉斯演算法
dst = cv2.Laplacian(binary, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
# Scharr算子
x = cv2.Scharr(gaussianBlur, cv2.CV_32F, 1, 0) #X方向
y = cv2.Scharr(gaussianBlur, cv2.CV_32F, 0, 1) #Y方向
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Scharr = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#Canny算子
Canny = cv2.Canny(gaussianBlur, 50, 150)
#先通過高斯濾波降噪
gaussian = cv2.GaussianBlur(grayImage, (3,3), 0)
#再通過拉普拉斯算子做邊緣檢測
dst = cv2.Laplacian(gaussian, cv2.CV_16S, ksize = 3)
LOG = cv2.convertScaleAbs(dst)
#效果圖
titles = ['Source Image', 'Binary Image', 'Roberts Image',
'Prewitt Image','Sobel Image', 'Laplacian Image',
'Scharr Image', 'Canny Image', 'LOG Image']
images = [lenna_img, binary, Roberts,
Prewitt, Sobel, Laplacian,
Scharr, Canny, LOG]
for i in np.arange(9):
plt.subplot(3,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
女神的運行結果如下圖所示:
源代碼下載地址,記得幫忙點star和關注喔,
- https://github.com/eastmountyxz/ImageProcessing-Python
大學之道在明明德,
在親民,在止于至善,
這周又回答了很多博友的問題,有大一學生的困惑,有論文的咨詢,也有老鄉和考博的疑問,還有無數博友奮斗路上的相互勉勵,雖然自己早已忙成狗,但總忍不住去解答別人的問題,最后那一句感謝和祝福,永遠是我最大的滿足,雖然會花費我一些時間,但也挺好的,無所謂了,跟著心走,不負遇見,感恩同行,莫愁前路無知己,繼續加油,晚安娜和珞,
(By:Eastmount 2021-07-19 晚上11點 http://blog.csdn.net/eastmount/ )
參考文獻:
- [1] 羅子江. Python中的影像處理[M]. 科學出版社 2020.
- [2]岡薩雷斯著. 數字影像處理(第3版)[M]. 北京:電子工業出版社,2013.
- [3]阮秋琦. 數字影像處理學(第3版)[M]. 北京:電子工業出版社,2008.
- [4]毛星云,冷雪飛. OpenCV3編程入門[M]. 北京:電子工業出版社,2015.
- [5]張錚,王艷平,薛桂香等. 數字影像處理與機器視覺——Visual C++與Matlab實作[M]. 北京:人民郵電出版社,2014.
- [6]楊秀璋. Python網路資料爬取及分析從入門到精通(分析篇)[M]. 北京:北京航天航空大學出版社, 2018.
- [7]楊秀璋,于小民,范郁鋒,李娜. 基于苗族服飾的影像銳化和邊緣提取技術研究[J]. 現代計算機,2018-10.
- [8]張小洪,楊丹,劉亞威. 基于Canny算子的改進型邊緣檢測演算法[J]. 計算機工程與應用,2003.
- [9]D. Marr and E. Hildreth. Theory of edge detection[C], Proc. R. Sot. London B Un, 1980. 187-217.
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/289300.html
標籤:python