人工智能之數學基礎篇—高等數學基礎(下篇)
- 6 方向導數
- 6.1 方向導數的定義
- 6.2 方向導數的幾何意義
- 7 梯度
- 8 綜合實體一梯度下降法求函式的最小值
- 9 Python中相關庫簡介
- 9.1 SymPy庫簡介
- 9.2 NumPy庫簡介
- 9.3 SciPy庫簡介
- 9.4 求導的3種方式
??最后,來重點介紹一下方向導數和梯度,因為梯度下降法是機器學習領域非常重要的演算法之一,也是應用廣泛的優化演算法之一,在本篇文章中,我將綜合實體來重點介紹梯度下降法及其應用,并利用Python語言編程實作,查看本文之前,可以先閱讀人工智能之數學基礎篇—高等數學基礎上篇和人工智能之數學基礎篇—高等數學基礎中篇,
6 方向導數
6.1 方向導數的定義
??由二元函式偏導數的概念,我們知道函式 f ( x , y ) f(x,y) f(x,y) 在點 ( x 0 , y 0 ) \left ( x_{0},y_{0} \right ) (x0?,y0?) 處的兩個偏導數,分別是函式 f f f 在點 ( x 0 , y 0 ) \left ( x_{0},y_{0} \right ) (x0?,y0?) 處沿與 x x x 軸和 y y y 軸平行的方向的變化率,但是在許多實際問題中,僅僅研究函式沿這兩個特殊方向的變化率是遠遠不夠的,還需要研究函式沿各個不同方向的變化率,例如,在大氣氣象中,就需要研究溫度、氣壓沿不同方向的變化率,這就是所謂的方向導數,
??從上述的分析中可以看出,偏導數反映的是函式沿坐標軸方向的變化率,方向導數本質上研究的是函式在某點處沿某特定方向的變化率問題,
??比如 z = f ( x , y ) z=f(x,y) z=f(x,y) 在點 p ( x 0 , y 0 ) p\left ( x_{0},y_{0} \right ) p(x0?,y0?) 沿方向 l l l 的變化率,假設方向如圖10所示, l l l 為 x O y xOy xOy 平面上以 p p p 為起始點的一條射線, p ′ p^{'} p′ 為方向 l l l 上的另一點,
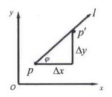
??由圖10可知, p p p 與 p ′ p^{'} p′之間的距離 ∣ p p ′ ∣ = ρ = Δ x 2 + Δ y 2 \left | pp^{'} \right | = \rho = \sqrt{\Delta x^{2} + \Delta y^{2}} ∣∣∣?pp′∣∣∣?=ρ=Δx2+Δy2 ?,
??函式的增量 Δ z = f ( x 0 + Δ x , y 0 + Δ y ) ? f ( x 0 , y 0 ) \Delta z = f\left ( x_{0}+\Delta x, y_{0}+\Delta y \right ) - f\left ( x_{0},y_{0} \right ) Δz=f(x0?+Δx,y0?+Δy)?f(x0?,y0?),
??考慮函式的增量與這兩點間距離的比值,當
p
′
p^{'}
p′ 沿著方向
l
l
l 趨于
p
p
p 時,如果這個比的極限存在,則稱這個極限為函式
f
(
x
,
y
)
f(x,y)
f(x,y) 在點
p
p
p 沿方向
l
l
l 的方向導數,記作
?
f
?
l
\frac{\partial f}{\partial l}
?l?f?,即
?
f
?
l
=
lim
?
ρ
→
0
f
(
x
0
+
Δ
x
,
y
0
+
Δ
y
)
?
f
(
x
0
,
y
0
)
ρ
\frac{\partial f}{\partial l}= \lim_{\rho \rightarrow 0}\frac{f\left ( x_{0}+\Delta x, y_{0}+\Delta y \right ) - f\left ( x_{0},y_{0} \right )}{\rho }
?l?f?=ρ→0lim?ρf(x0?+Δx,y0?+Δy)?f(x0?,y0?)?
??從定義可知,當函式 f ( x , y ) f(x,y) f(x,y) 在點 p ( x 0 , y 0 ) p\left ( x_{0},y_{0} \right ) p(x0?,y0?) 的偏導數 f x ( x 0 , y 0 ) f_{x}\left ( x_{0},y_{0} \right ) fx?(x0?,y0?)、 f y ( x 0 , y 0 ) f_{y}\left ( x_{0},y_{0} \right ) fy?(x0?,y0?) 存在時,函式 f ( x , y ) f(x,y) f(x,y) 在 p p p 點沿著 x x x 軸正向單位向量 e 1 = { 1 , 0 } e_{1}=\left \{ 1,0 \right \} e1?={1,0}, y y y 軸正向單位向量 e 2 = { 0 , 1 } e_{2}=\left \{ 0,1 \right \} e2?={0,1} 的方向導數存在,且其值依次為 f x ( x 0 , y 0 ) f_{x}\left ( x_{0},y_{0} \right ) fx?(x0?,y0?), f y ( x 0 , y 0 ) f_{y}\left ( x_{0},y_{0} \right ) fy?(x0?,y0?);函式 f ( x , y ) f(x,y) f(x,y) 在 p p p 點沿著 x x x 軸負向單位向量 e 1 ′ = { ? 1 , 0 } e_{1}^{'}=\left \{ -1,0 \right \} e1′?={?1,0}, y y y 軸負向單位向量 e 2 ′ = { 0 , ? 1 } e_{2}^{'}=\left \{ 0,-1 \right \} e2′?={0,?1} 的方向導數存在,且其值依次為 ? f x ( x 0 , y 0 ) -f_{x}\left ( x_{0},y_{0} \right ) ?fx?(x0?,y0?), ? f y ( x 0 , y 0 ) -f_{y}\left ( x_{0},y_{0} \right ) ?fy?(x0?,y0?),
??方向導數 ? f ? l \frac{\partial f}{\partial l} ?l?f? 的存在及計算如下定理,
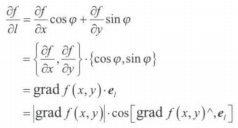
定理5?如果函式 z = f ( x , y ) z=f(x,y) z=f(x,y) 在點 p ( x 0 , y 0 ) p\left ( x_{0},y_{0} \right ) p(x0?,y0?) 是可微分的,那么函式在該點沿任意方向 l l l 的方向導數都存在,且有
? f ? l = ? f ? x c o s φ + ? f ? y s i n φ \frac{\partial f}{\partial l}=\frac{\partial f}{\partial x}cos\varphi +\frac{\partial f}{\partial y}sin\varphi ?l?f?=?x?f?cosφ+?y?f?sinφ
其中 φ \varphi φ 為 x x x 軸到 l l l 方向的轉角,
6.2 方向導數的幾何意義
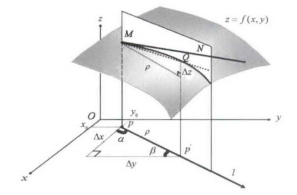
??方向導數的幾何意義如圖11所示,函式 z = f ( x , y ) z=f(x,y) z=f(x,y) 的變化方向為 l l l,方向導數 ? f ? l ∣ p \left.\begin{matrix} \frac{\partial f}{\partial l} \end{matrix}\right|_{p} ?l?f??∣∣?p? 是函式 z = f ( x , y ) z=f(x,y) z=f(x,y) 在點 p p p 處沿方向 l l l 的變化率,從方向 l l l 作垂直于 x O y xOy xOy 平面的一個平面,與曲面相交成一條曲線 M Q MQ MQ, ? f ? l ∣ p \left.\begin{matrix} \frac{\partial f}{\partial l} \end{matrix}\right|_{p} ?l?f??∣∣?p? 即為曲線 M Q MQ MQ 在 M M M 點的切線 M N MN MN 的斜率,
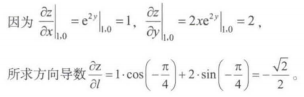
??【例13】求函式 z = x e 2 y z = xe^{2y} z=xe2y 在點 P ( 1 , 0 ) P\left ( 1,0 \right ) P(1,0) 到點 Q ( 2 , ? 1 ) Q\left ( 2,-1 \right ) Q(2,?1) 方向的方向導數,
??解:這里方向
l
l
l 即向量
P
Q
→
=
{
1
,
?
1
}
\overrightarrow{PQ}=\left \{ 1,-1 \right \}
PQ
?={1,?1} 的方向,因此
x
x
x 軸到方向
l
l
l 的轉角
φ
=
?
π
4
\varphi = -\frac{\pi }{4}
φ=?4π?,
???
??由方向導數的意義可知,方向導數 ? f ? l ∣ p \left.\begin{matrix} \frac{\partial f}{\partial l} \end{matrix}\right|_{p} ?l?f??∣∣?p? 是 z = f ( x , y ) z=f(x,y) z=f(x,y) 在點 p p p 處沿方向 l l l 的變化率,是曲面上過 M M M 點的一條曲線的切線的斜率,那么點 p p p 在某一方向的變化率,就是過曲面 M M M 點的某一條曲線的切線的斜率,根據曲面的切平面與法線的相關概念可知,曲面上通過點 M M M 且在點 M M M 處具有切線的曲線,它們在點 M M M 處的切線都在同一個平面上,這個平面稱為切平面,因此方向導數 ? f ? l ∣ p \left.\begin{matrix} \frac{\partial f}{\partial l} \end{matrix}\right|_{p} ?l?f??∣∣?p? 為過 M M M 點的切平面上的某條直線的斜率,那么哪一個方向的變化率最大呢?下面繼續討論,
7 梯度
定義16?設函式 z = f ( x , y ) z=f(x,y) z=f(x,y) 在平面區域 D D D 內具有一階連續偏導數,則對于每一點 p ( x , y ) ? D p\left ( x,y \right )\epsilon D p(x,y)?D,都可定出一個向量 ? f ? x i → + ? f ? y j → \frac{\partial f}{\partial x}\overrightarrow{i}+\frac{\partial f}{\partial y}\overrightarrow{j} ?x?f?i +?y?f?j ?,這個向量稱為函式 z = f ( x , y ) z=f(x,y) z=f(x,y) 在點 p ( x , y ) p(x,y) p(x,y) 的梯度,記作 g r a d f ( x , y ) gradf(x,y) gradf(x,y),即
g r a d f ( x , y ) = ? f ? x i → + ? f ? y j → gradf(x,y) = \frac{\partial f}{\partial x}\overrightarrow{i}+\frac{\partial f}{\partial y}\overrightarrow{j} gradf(x,y)=?x?f?i +?y?f?j ?
??設 e l → = c o s φ i → + s i n φ j → \overrightarrow{e_{l}} = cos\varphi\overrightarrow{i}+sin\varphi \overrightarrow{j} el? ?=cosφi +sinφj ? 是與方向 l l l 同方向的單位向量(其中 φ \varphi φ 為 x x x 軸到方向 l l l 的轉角),則由方向導數的計算公式可知:
??
??由公式推導可以看出,方向導數 ? f ? l \frac{\partial f}{\partial l} ?l?f? 等于梯度與 e l → \overrightarrow{e_{l}} el? ? 的乘積,即梯度的模 ∣ g r a d ? f ( x , y ) ∣ \left | grad\, f\left ( x,y \right ) \right | ∣gradf(x,y)∣ 在方向 l l l 上的投影,當方向 l l l 與梯度的方向一致時,方向導數 ? f ? l \frac{\partial f}{\partial l} ?l?f? 有最大值,所以,沿梯度方向的方向導數達到最大值,也就是說,梯度方向是函式 z = f ( x , y ) z=f(x,y) z=f(x,y) 在這點增長最快的方向,因此,可以得到如下結論,
??函式在某點的梯度是一個向量,它的方向與取得最大方向導數的方向一致,而它的模為方向導數的最大值,
??由梯度的定義可知,梯度的模為
 ??
??
??一般來說,函式
z
=
f
(
x
,
y
)
z=f(x,y)
z=f(x,y) 在幾何上表示一個曲面,這個曲面被平面
z
=
c
z=c
z=c (
c
c
c 是常數)所截得的曲線
l
l
l 的方程為:
{
z
=
f
(
x
,
y
)
z
=
c
\begin{cases} z = f(x,y) & \\ z = c & \end{cases}
{z=f(x,y)z=c??
這條曲線
l
l
l 在
x
O
y
xOy
xOy 平面上的投影是平面曲線
L
?
L^{*}
L?,它在
x
O
y
xOy
xOy 平面直角坐標系中的方程為
f
(
x
,
y
)
=
c
f(x,y)=c
f(x,y)=c,曲線
L
?
L^{*}
L? 上的任意點,函式值都是
c
c
c,所以稱平面曲線
L
?
L^{*}
L? 為函式
z
=
f
(
x
,
y
)
z=f(x,y)
z=f(x,y) 的等高線,
??由于等高線
f
(
x
,
y
)
=
c
f(x,y)=c
f(x,y)=c 上任意點
(
x
,
y
)
(x,y)
(x,y) 處的法線的斜率為:
?
1
d
y
d
x
=
?
1
(
?
f
x
f
y
)
=
f
y
f
x
-\frac{1}{\frac{dy}{dx}}=-\frac{1}{\left ( -\frac{f_{x}}{f_{y}} \right )}=\frac{f_{y}}{f_{x}}
?dxdy?1?=?(?fy?fx??)1?=fx?fy??
??所以梯度
g
r
a
d
f
(
x
,
y
)
=
?
f
?
x
i
→
+
?
f
?
y
j
→
gradf(x,y) = \frac{\partial f}{\partial x}\overrightarrow{i}+\frac{\partial f}{\partial y}\overrightarrow{j}
gradf(x,y)=?x?f?i
+?y?f?j
?為等高線上點
(
x
,
y
)
(x,y)
(x,y) 處的法向量,因此可得到梯度與等高線的關系如下,
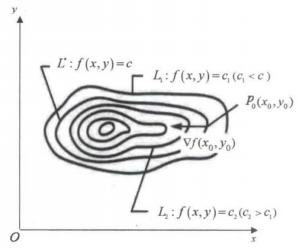
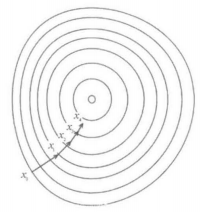
??如圖12所示,圖中顯示了6條等高線,在等高線
f
(
x
,
y
)
=
c
f(x,y)=c
f(x,y)=c 上有一點
p
0
(
x
0
,
y
0
)
p_{0}\left ( x_{0},y_{0} \right )
p0?(x0?,y0?),可以看出點
p
0
(
x
0
,
y
0
)
p_{0}\left ( x_{0},y_{0} \right )
p0?(x0?,y0?) 的切線與法線垂直,圖中
c
2
>
c
>
c
1
c_{2}>c>c_{1}
c2?>c>c1?,
p
0
(
x
0
,
y
0
)
p_{0}\left ( x_{0},y_{0} \right )
p0?(x0?,y0?) 點的法線方向與梯度
▽
f
(
x
0
,
y
0
)
\triangledown f\left ( x_{0},y_{0} \right )
▽f(x0?,y0?) 相同,
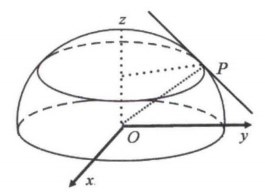
??梯度為方向導數取最大值的方向的概念并不好理解,再通俗一點,設想曲面為一座高山,而這座山像一個球的半面,如圖13所示,現在,有一個人站在半山腰
p
p
p 點位置上,他想要尋找下山最快的方向,在他所處的位置做一個切面,所有的方向導數都在此切面上,哪一個方向使他下山最快呢?采用他所處位置的等高線的切線的法向量最快,由于是下山,因此采用的是梯度的反方向,
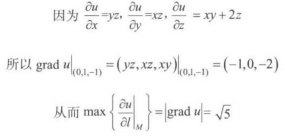
??【例14】求函式 u = x y z + z 2 + 5 u=xyz+z^{2}+5 u=xyz+z2+5,求 g r a d ? u grad\, u gradu 及在點 M ( 0 , 1 , ? 1 ) M(0,1,-1) M(0,1,?1) 處方向導數的最大值,
??解:
8 綜合實體一梯度下降法求函式的最小值
??梯度下降法,是尋找函式極小值最常用的優化方法,當目標函式是凸函式時,梯度下降法的解是全域解,但在一般情況下,其解不保證是全域最優解,最普遍的做法是,在已知引數當前值時,按當前點對應的梯度向量的反方向及事先定好的步長大小對引數進行調整,按上述方法對引數做出多次調整之后,函式就會通近一個極小值,
??例如,假設函式 f ( x ) f(x) f(x) 為一元連續函式,初始值為 x 0 x_{0} x0?, α \alpha α 為步長,已知在點 x 0 x_{0} x0? 的梯度為 g r a d ? f ( x 0 ) grad\, f\left ( x_{0} \right ) gradf(x0?),那么下一個點的坐標為 x 1 = x 0 ? α ? g r a d ? f ( x 0 ) x_{1}=x_{0}-\alpha *grad\, f\left ( x_{0} \right ) x1?=x0??α?gradf(x0?),然后再求點 x 1 x_{1} x1? 的梯度,反復迭代,直到 f ( x n ) ? f ( x n ? 1 ) f\left ( x_{n} \right )-f\left ( x_{n-1} \right ) f(xn?)?f(xn?1?) 的絕對差極小,迭代結束,此時的 f ( x n ) f\left ( x_{n} \right ) f(xn?) 即為極小值,
??下面舉一個例子來說明梯度下降法的基本原理,
??假設曲面上一只螞蟻突遇火災,該如何快速逃跑呢?此問題可以類比為一個下山的程序:假設螞蟻被困在高山上,需要快速找到山的最低點,即山谷,但此時山上的煙霧很大,可視度很低,下山的路徑無法確定,它必須利用自己周圍的資訊去尋找,這個時候,它就可以利用梯度下降法來幫助自己下山,以它當前所處的位置為基準,尋找這個位置最陡峭的地方,朝著山的高度下降最快的地方走,但是,由于山的地形復雜,坡度變化隨機,這樣一直往下走無法確定路徑是否正確,因此可以采用每走一段距離,都反復采用同一個方法(即尋找當前位置最陡峭的地方,朝著山的高度下降最快的地方走),最后就能成功地抵達山谷,
??梯度下降的程序就與螞蟻下山的場景類似,
??首先,有一個可微分的函式
f
(
x
)
f(x)
f(x),這個函式就代表著一座山,我們的目標就是找到這個函式的最小值,也就是山底,根據之前的場景假設,最快下山的方式就是找到當前位置最陡峭的方向,然后沿著此方向向下走,對應到函式中,就是找到給定點
x
0
?
?
?
I
x_{0}\, \epsilon \, I
x0??I 的梯度,梯度相反的方向就能讓函式值下降最快,重復利用這個方法,反復求取梯度,最后就能到達區域的最小值,梯度下降法搜索迭代程序如圖14所示,
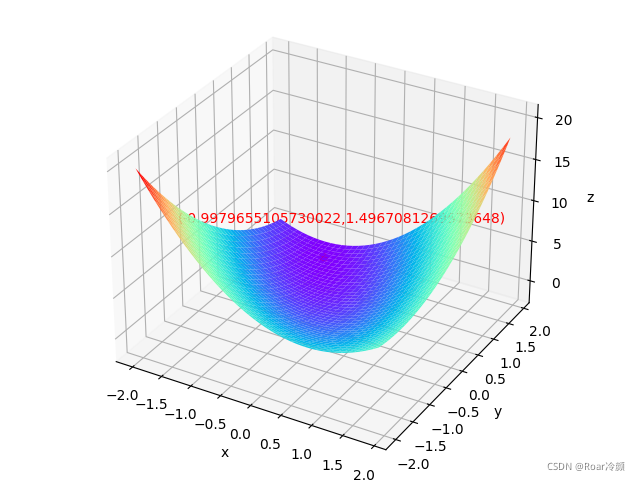
??【例15】應用
P
y
t
h
o
n
Python
Python 編程實作梯度下降法求解下面函式的最小值,并使用
M
a
t
p
l
o
t
l
i
b
Matplotlib
Matplotlib、
m
p
l
?
t
o
o
l
k
i
t
s
mpl_{-}toolkits
mpl??toolkits 庫畫出函式的圖形,
m
i
n
?
f
(
x
)
=
x
1
?
x
2
+
2
x
1
2
+
2
x
1
x
2
+
x
2
2
min\, f\left ( x \right ) = x_{1}-x_{2}+2x_{1}^{2}+2x_{1}x_{2}+x_{2}^{2}
minf(x)=x1??x2?+2x12?+2x1?x2?+x22?給定初值
X
(
0
)
=
(
0
,
0
)
T
X^{\left ( 0 \right )}=\left ( 0,0 \right )^{T}
X(0)=(0,0)T,
??解: m a t p l o t l i b . p y p l o t matplotlib.pyplot matplotlib.pyplot 是一個有命令風格的函式集合,它看起來和 M A T L A B MATLAB MATLAB 很相似,每一個 p y p l o t pyplot pyplot 函式都使一幅影像 f i g u r e figure figure 做出些許改變; m p l ? t o o l k i t s . m p l o t 3 d mpl_{-}toolkits.mplot3d mpl??toolkits.mplot3d 是三維工具包,本例中 m p l o t 3 d mplot3d mplot3d 仍使用 f i g u r e figure figure 物件,只不過 A x e s Axes Axes 物件要替換為該工具集的 A x e s 3 d Axes3d Axes3d 物件,
??【代碼如下】
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d.axes3d import Axes3D
# f(w1,w2) = w1 - w2 + 2*w1^2 + w2^2 + 2*w1*w2
def target_function(w): # 目標函式
w_1, w_2 = w
return w_1 - w_2 + 2 * w_1 ** 2 + w_2 ** 2 + 2 * w_1 * w_2
def gradient_function(w): # 梯度函式:分別對w1,w2求偏導
w_1, w_2 = w
w1_grad = 1 + 4 * w_1 + 2 * w_2
w2_grad = -1 + 2 * w_1 + 2 * w_2
return np.array([w1_grad, w2_grad])
# 梯度下降演算法
def batch_gradient_distance(target_func, gradient_func, init_w, learning_rate=0.0008, tolerance=7e-9):
w = init_w
target_value = target_func(w)
counts = 0 # 用于計算次數
while counts < 50000:
gradient = gradient_func(w)
next_w = w - gradient * learning_rate
next_target_value = target_func(next_w)
if abs(next_target_value-target_value) < tolerance:
print("此結果經過了", counts, "次回圈")
return next_w
else:
w, target_value = next_w, next_target_value
counts += 1
else:
print("沒有取到極值點")
if __name__ == '__main__':
init_w = np.array([0, 0]) # 初始坐標點為(0,0)
w1, w2 = batch_gradient_distance(target_function, gradient_function, init_w)
print(w1, w2)
# 畫圖
x1 = np.arange(-2, 2, 0.1)
x2 = np.arange(-2, 2, 0.1)
x1, x2 = np.meshgrid(x1, x2) # meshgrid :3D坐標系
z = x1 - x2 + 2 * x1 ** 2 + x2 ** 2 + 2 * x1 * x2
fig = plt.figure() # figure 物件
ax = Axes3D(fig, auto_add_to_figure=False) # Axes3D 物件
fig.add_axes(ax)
# fig = plt.figure()
# ax = fig.gca(projection='3d')
ax.plot_surface(x1, x2, z, rstride=1, cstride=1, cmap="rainbow") # 繪制3D坐標系中的函式影像
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('z')
ax.scatter(w1, w2, target_function([w1, w2]), s=30, c='red') # 繪制已經找到的極值點
ax.text(-2, -1, 10, '(' + str(w1) + "," + str(w2) + ')', color='red')
plt.show()
??【運行結果】
9 Python中相關庫簡介
??在高等數學基礎篇的三篇文章中利用了Python來求解相關的問題,主要用到了SymPy 、 NumPy 、 SciPy 、 Matplotlib 庫 ,因此,接下來將對幾個相關的庫做簡要總結,
9.1 SymPy庫簡介
??SymPy 是 Python 的一個科學計算庫,用強大的符號計算體系完成諸如多項式求值、求極限 、求導 、解方程 、求積分 、解微分方程、級數展開 、矩陣運算等計算 ,
??(1)常用的 SymPy 內置符號
??自然對數的底 e e e 的表示方式 ,
??【代碼如下】
import sympy
print(sympy.E)
print(sympy.log(sympy.E)) # 自然對數的底 e 的表示方式,
E
1
??無窮大 ∞ \infty ∞ 的表示方式 ,
??【代碼如下】
import sympy
print(1/sympy.oo) # 無窮大 ∞ 的表示方式,
0
??圓周率 π π π 的表示方式 ,
??【代碼如下】
import sympy
print(sympy.sin(sympy.pi)) # 圓周率 π 的表示方式,
0
??(2)用 SymPy 進行初等運算
??常用的函式有:求對數函式 sympy.log 、正弦函式 sympy.sin 、求平方根函式 sympy.sqrt 、求 n 次方根函式 sympy.root、求階乘函式 sympy.factorial 等,
??(3)運算式與運算式求值
??SymPy 可以用一套符號系統來表示一個運算式,如函式、多項式等,并且可以進行求值,
??【代碼如下】
import sympy
x = sympy.Symbol('x')
fx = 2*x + 1 # fx 是一個運算式
print(fx.evalf(subs={x: 2})) # 用 evalf() 函式,傳入變數的值,對運算式進行求值
x, y = sympy.symbols('x y')
f = 2 * x + y
f.evalf(subs={x: 1, y: 2}) # 以字典的形式傳入多個變數的值
print(f.evalf(subs={x: 1})) # 如果只傳入一個變數的值,則輸出原來的運算式
print(f.evalf(subs={x: 1, y: 2})) # 用 evalf() 函式,傳入變數的值,對運算式進行求值
5.00000000000000
y + 2.0
4.00000000000000
??(4)利用 SymPy 求極限
??使用函式 sympy.limit 求極限,可以參考人工智能之數學基礎篇—高等數學基礎(上篇)中的例5、例6和例8,
??(5)利用 SymPy 求導
??使用函式 sympy.diff 求導數,傳入兩個引數即函式運算式和變數名,可以參考人工智能之數學基礎篇—高等數學基礎(中篇)中的例10和例11,
9.2 NumPy庫簡介
??NumPy 是 Python 的一個擴展程式庫,支將大維度陣列與矩陣運算,此外也針對陣列運算提供大量的數學函式庫,NumPy 是一個運行速度非常快的數學庫,主要用于陣列計算,
??NumPy 通常與 SciPy 和 Matplotlib (繪圖庫)一起使用, 這種組合廣泛應用于替代MATLAB,是一個強大的科學計算環境, 在本篇文章例15中就利用了這些庫實作了求函式最小值的解,并用 NumPy 和 Matplotlib 的一些函式實作了函式影像的可視化,
??(1)陣列的操作
??【代碼如下】
import numpy as np
a = np.array([1, 2, 3]) # 創建一個秩 (rank)1 陣列
print(a[0], a[1], a[2])
b = np.array([[1, 2, 3], [4, 5, 6]]) # 創建一個秩 2 陣列
print(b[0, 0], b[0, 1], b[1, 0])
1 2 3
1 2 4
??(2)在繪制三維圖表時,需要用到 NumPy 中的 mgrid 函式,它會回傳一個密集的多維網格,一般形式為 np.mgrid[start: end: step],其中 start 表示開始值,end 表示結束坐標(不包含此點), step表示步數,
??【代碼如下】
import numpy as np
print(np.mgrid[-1:4:2])
[-1 1 3]
print(np.mgrid[-1:4:2, -3:1:1])
[[[-1 -1 -1 -1]
[ 1 1 1 1]
[ 3 3 3 3]]
[[-3 -2 -1 0]
[-3 -2 -1 0]
[-3 -2 -1 0]]]
print(np.mgrid[-1:4:2, -3:1:2])
[[[-1 -1]
[ 1 1]
[ 3 3]]
[[-3 -1]
[-3 -1]
[-3 -1]]]
9.3 SciPy庫簡介
??SciPy 是世界上著名的 Python 開源科學計算庫,構建在 NumPy 之上,功能更為強大,SciPy 函式庫在 NumPy 庫的基礎上增加了眾多的數以及工程計算中常用的庫函式,可以說,NumPy 是一個純數學的計算模塊, 而 SciPy 是一個更高階的科學計算庫 ,SciPy 庫需要 NumPy 庫的支持,由于這種依賴關系,NumPy 庫的安裝要先于 SciPy 庫,后面會使用該庫來計算函式的積分,
9.4 求導的3種方式
??(1)使用 SymPy 的 diff 函式,可以得到 f ( x ) f(x) f(x) 的導數運算式;
??(2)使用 scipy.misc 模塊下的 derivative 函式,SciPy 的求導相對簡單也容易理解,
??【代碼如下】
import numpy as np
from scipy.misc import derivative
def f(x):
return x**5
print(derivative(f, 2, dx=1e-6)) # 對函式在 x=2 處求導
80.00000000230045
??(3)使用 NumPy 模塊里 polyld 函式構造 f ( x ) f(x) f(x),polyld 函式的形參是多項式的系數,最左側的是最高次數的系數,構造的函式為多項式,NumPy 的 polyder 函式和 deriv 函式的作用差不多,都是對多項式求導,可以得到函式導數的運算式和在某點的導數,
??【例16】對多項式 x 5 + 2 x 4 + 3 x 2 + 5 x^{5}+2x^{4}+3x^{2}+5 x5+2x4+3x2+5 求導,
??【代碼如下】
import numpy as np
p = np.poly1d([1, 2, 0, 3, 0, 5]) # 構造多項式
print(p) # 下面兩行為多項式的顯示形式,5、4、2 是下一行項數所對應的冪次,
5 4 2
1 x + 2 x + 3 x + 5
print(np.polyder(p, 1)) # 求一階導數
4 3
5 x + 8 x + 6 x
print(np.polyder(p, 1)(1.0)) # 求一階導數在點 x=1 的值,
19.0
print(p.deriv(1)) # 求一階導數
4 3
5 x + 8 x + 6 x
print(p.deriv(1)(1.0)) # 求一階導數在點 x=1 的值,
19.0
轉載請註明出處,本文鏈接:https://www.uj5u.com/houduan/347135.html
標籤:python