我是 opencv 的新手,想用它來裁剪影像的一部分,然后使用 tesseract 來讀取它們。我不確定裁剪我需要的所有必要框的最佳方法是什么。
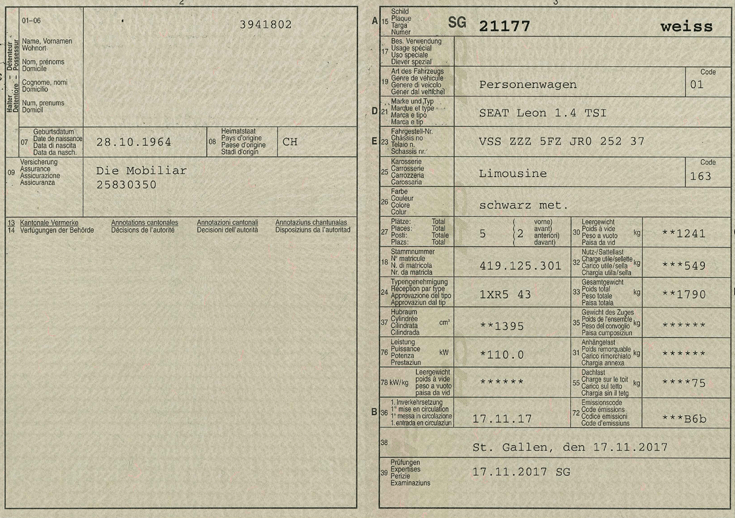
這是我需要轉換的檔案的一個簡單示例:
關于什么是最好的任何建議?
我嘗試使用 ORB 和以下影像作為模板:
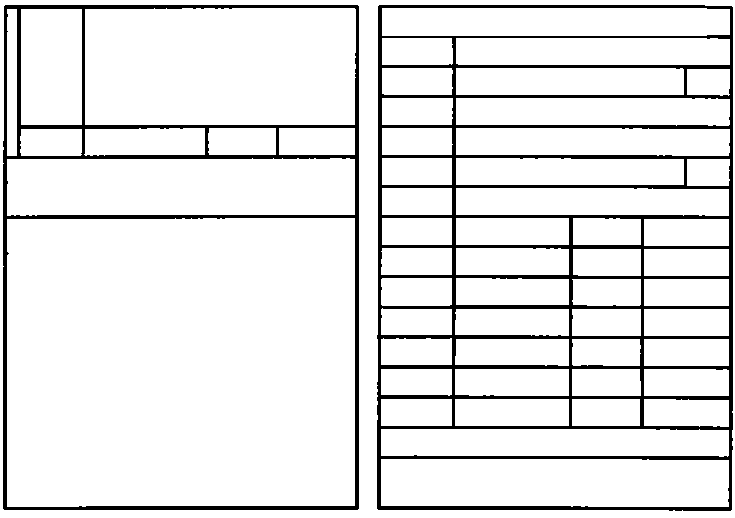
但沒有成功。
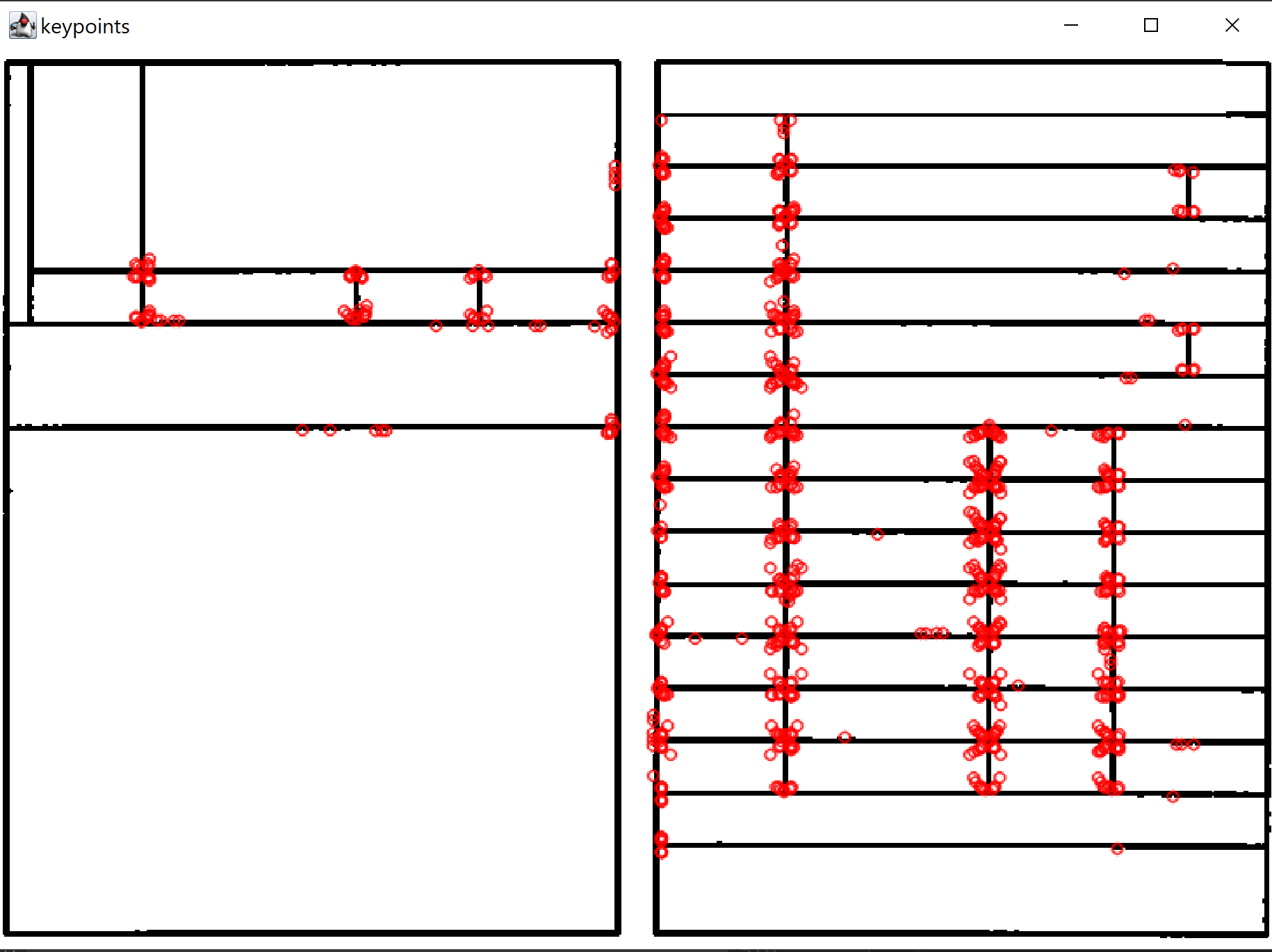
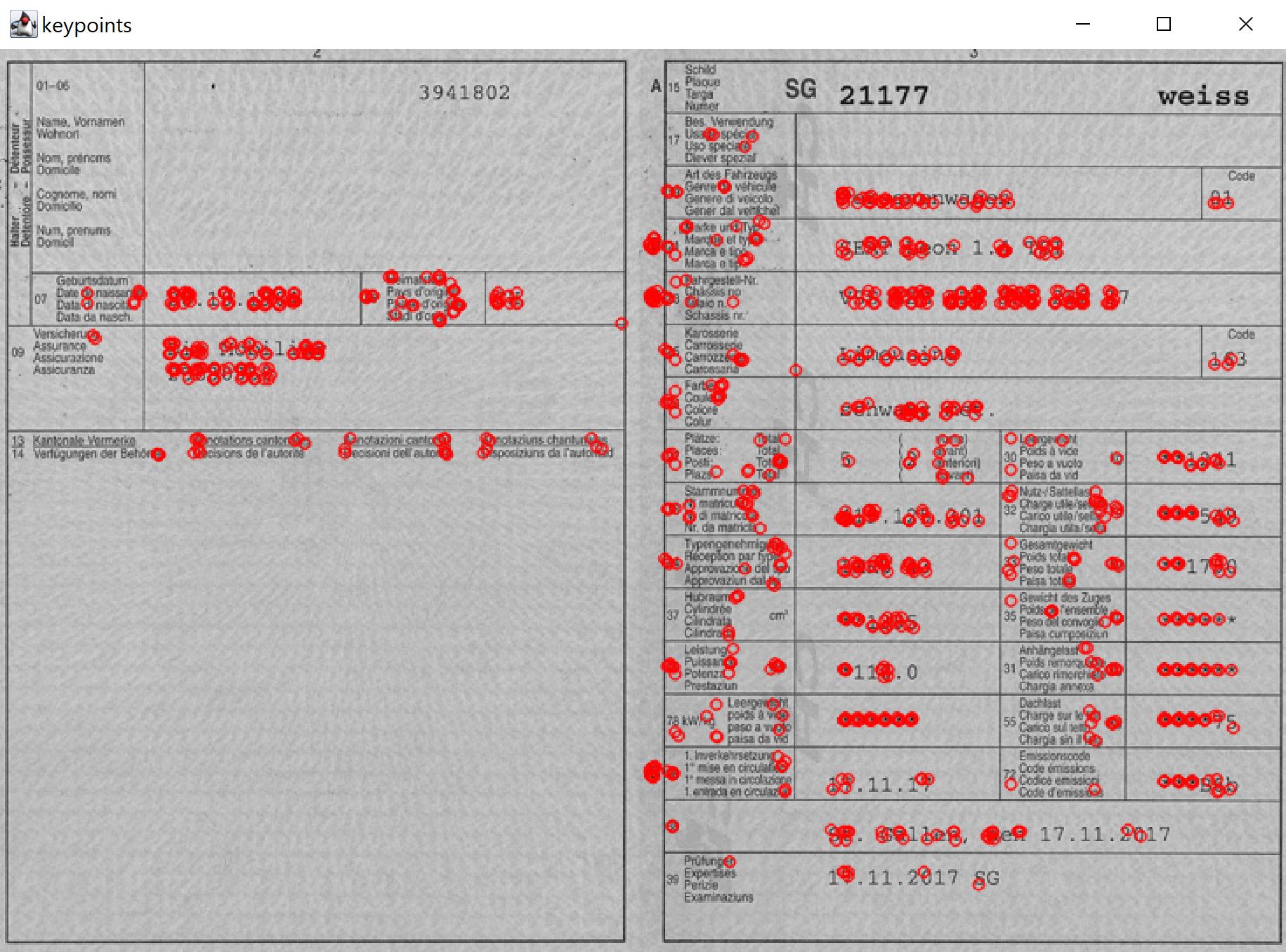
在模板上,一些線被選為關鍵點,但在影像上我想處理它主要是文本而不是線。這是一個糟糕的模板嗎?我需要先處理影像嗎?
和我的代碼:
Feature2D f2d = ORB.create(5000); // SIFT.create(1000);
MatOfKeyPoint keypoints1 = new MatOfKeyPoint();
Mat descriptors1 = new Mat();
Mat mask1 = new Mat();
f2d.detectAndCompute(img1, mask1, keypoints1, descriptors1);
MatOfKeyPoint keypoints2 = new MatOfKeyPoint();
Mat descriptors2 = new Mat();
Mat mask2 = new Mat();
f2d.detectAndCompute(img2, mask2, keypoints2, descriptors2);
DescriptorMatcher matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE_HAMMING);
MatOfDMatch matches = new MatOfDMatch();
matcher.match(descriptors1, descriptors2, matches);
Mat outputImg = new Mat();
MatOfByte drawnMatches = new MatOfByte();
Features2d.drawMatches(img1, keypoints1, img2, keypoints2, matches, outputImg, new Scalar(0, 255, 0), new Scalar(255, 0, 0), drawnMatches, Features2d.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS);
uj5u.com熱心網友回復:
通過使用包含表單中永不更改的所有文本的模板,我可以獲得良好的結果。此外,創建 2 個模板(每頁 1 個)并使用 SIFT 代替 ORB 也有很大幫助。
這是我的解決方案:
public static Mat matchTEmplateSIFT(Mat img1, Mat template, boolean showKeypoints, boolean drawMatchs) {
Feature2D f2d = SIFT.create(15000);
DescriptorMatcher matcher = DescriptorMatcher.create(DescriptorMatcher.BRUTEFORCE_SL2); // or FLANNBASED for better performance
return matchTEmplate(img1, template, f2d, matcher);
}
public static Mat matchTEmplate(Mat baseImage, Mat template, Feature2D f2d, DescriptorMatcher matcher) {
int dilateSize = 5;
Mat scene = dilateBitwise(dilateSize, baseImage.clone());
template = dilateBitwise(dilateSize, template.clone());
MatOfKeyPoint keypoints1 = new MatOfKeyPoint();
Mat descriptors1 = new Mat();
f2d.detectAndCompute(scene, new Mat(), keypoints1, descriptors1);
MatOfKeyPoint keypoints2 = new MatOfKeyPoint();
Mat descriptors2 = new Mat();
f2d.detectAndCompute(template, new Mat(), keypoints2, descriptors2);
List<MatOfDMatch> matches = new ArrayList<>();
matcher.knnMatch(descriptors1, descriptors2, matches, 2);
MatOfDMatch goodMatches = getBestMatches(matches);
Mat result = transformAndWarp(baseImage, template, keypoints1, keypoints2, goodMatches);
return result;
}
private static Mat transformAndWarp(Mat baseImage, Mat template, MatOfKeyPoint keypoints1, MatOfKeyPoint keypoints2, MatOfDMatch goodMatches) {
Mat H = findHomographyMatrix(keypoints1, keypoints2, goodMatches);
perspectiveTransform(template, H);
Mat result = new Mat();
Imgproc.warpPerspective(baseImage, result, H, new Size(template.cols(), template.rows()));
return result;
}
private static void perspectiveTransform(Mat template, Mat H) {
Mat obj_corners = new Mat(4, 1, CvType.CV_32FC2);
obj_corners.put(0, 0, new double[]{0, 0});
obj_corners.put(0, 0, new double[]{template.cols(), 0});
obj_corners.put(0, 0, new double[]{template.cols(), template.rows()});
obj_corners.put(0, 0, new double[]{0, template.rows()});
Mat scene_corners = new Mat(4, 1, CvType.CV_32FC2);
Core.perspectiveTransform(obj_corners, scene_corners, H);
}
private static Mat findHomographyMatrix(MatOfKeyPoint keypoints1, MatOfKeyPoint keypoints2, MatOfDMatch goodMatches) {
LinkedList<Point> templateList = new LinkedList<>();
LinkedList<Point> sceneList = new LinkedList<>();
List<KeyPoint> templateKeyPoints = keypoints1.toList();
List<KeyPoint> sceneKeypoints = keypoints2.toList();
for (int i = 0; i < goodMatches.toList().size(); i ) {
templateList.addLast(templateKeyPoints.get(goodMatches.toList().get(i).queryIdx).pt);
sceneList.addLast(sceneKeypoints.get(goodMatches.toList().get(i).trainIdx).pt);
}
MatOfPoint2f templateMat = new MatOfPoint2f();
templateMat.fromList(templateList);
MatOfPoint2f sceneMat = new MatOfPoint2f();
sceneMat.fromList(sceneList);
return Calib3d.findHomography(templateMat, sceneMat, Calib3d.RANSAC);
}
// https://docs.opencv.org/3.4/d5/d6f/tutorial_feature_flann_matcher.html
private static MatOfDMatch getBestMatches(List<MatOfDMatch> knnMatches) {
//-- Filter matches using the Lowe's ratio test
float ratioThresh = 0.5f;
List<DMatch> listOfGoodMatches = new ArrayList<>();
for (int i = 0; i < knnMatches.size(); i ) {
if (knnMatches.get(i).rows() > 1) {
DMatch[] matches = knnMatches.get(i).toArray();
if (matches[0].distance < ratioThresh * matches[1].distance) {
listOfGoodMatches.add(matches[0]);
}
}
}
MatOfDMatch matOfDMatch = new MatOfDMatch();
matOfDMatch.fromList(listOfGoodMatches);
return matOfDMatch;
}
轉載請註明出處,本文鏈接:https://www.uj5u.com/net/355043.html
上一篇:如何根據文本自動旋轉影像?