TB6612 如何驅動電機與降壓模塊的基本使用
一.TB6612模塊

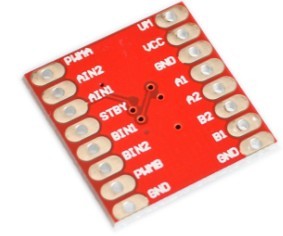
1.TB6612的接線
tb6612是雙電機驅動,即可同時驅動兩個電機,有四種電機控制模式:正轉/反轉/制動/停止
VM :5V-10V電壓
VCC:邏輯電平輸入(接到C8t6上時,接3.3v或5v都可)
M1電機控制端:
pwmA:接到c8t6的pwm輸出引腳上(c8t6的pwm是通過定時器輸出的,對照資料手冊找到相應的定時器pwm輸出通道即可)
AIN1\AIN2:接到c8t6的io口(一個為高電平,另一個為低電平即可使電機轉動)
AO1\AO2:接電機線
M2電機控制端:
pwmB:接到c8t6的pwm輸出引腳上(c8t6的pwm是通過定時器輸出的,對照資料手冊找到相應的定時器pwm輸出通道即可)
BIN1\BIN2:接到c8t6的io口(一個為高電平,另一個為低電平即可使電機轉動)
BO1\BO2:接電機線
STBY:這是模塊作業狀態控制端,高電平作業,低電平不作業(使用時可連接到c8t6的io口,只需把此io口設定為高電平即可)
GND:接地,連接一個即可
2.tb6612控制電機的正反轉和轉速
正反轉是通過AIN1、AIN2、BIN1、BIN2四個引腳控制的,而電機轉速是通過PWMA、PWMB控制的
真值表
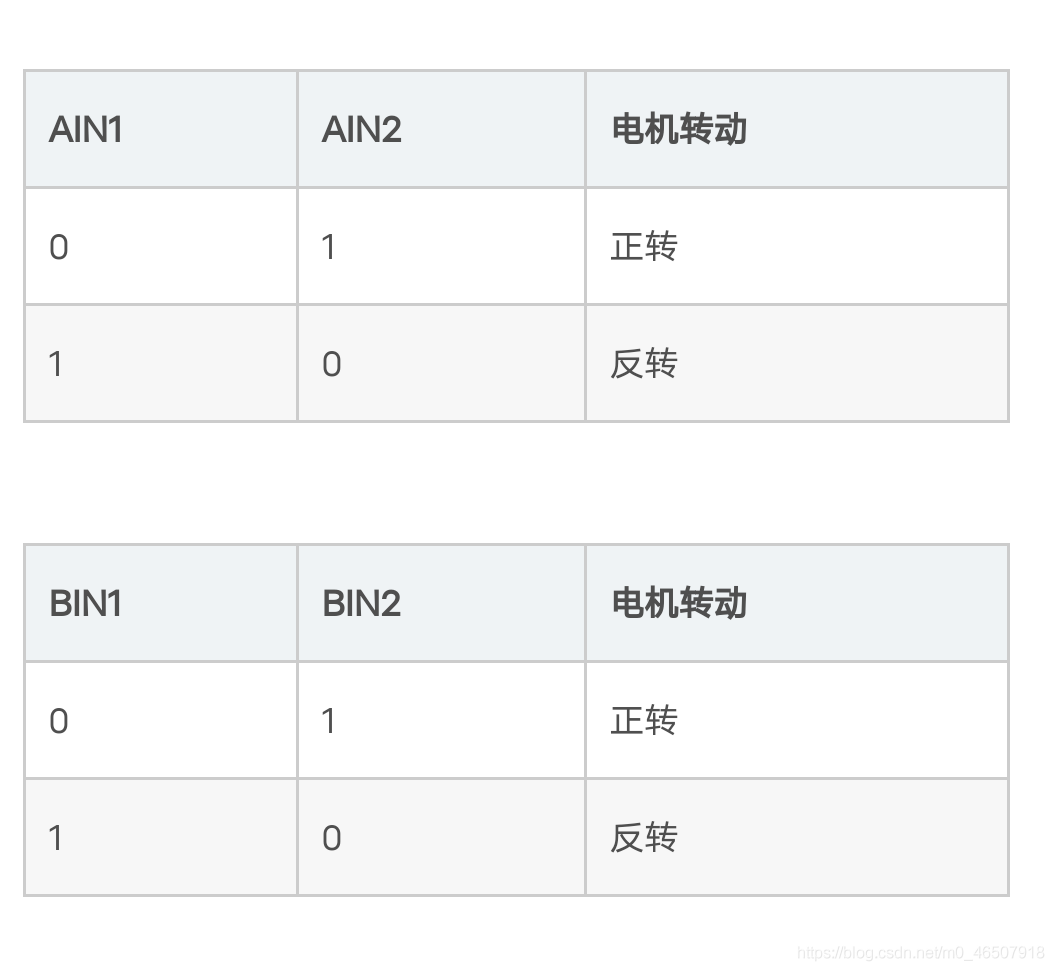
可以看出只需改變AIN1、AIN2、BIN1、BIN2的高低電平就可實作電機的正反轉,
而轉速的改變是通過改變pwm的占空比來實作的,高電平占空比越小電機轉速越慢,本人的理解是電機在單位時間內接到的高電平時間減少,他的速度就會變慢
下面附上我的pwm輸出配置的代碼,我是采用了定時器2的通道3和通道4來輸出兩路pwm波
void TIM2_PWM_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_2|GPIO_Pin_3;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
TIM_TimeBaseInitStruct.TIM_Period=899;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Prescaler=0;
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM2;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OC3Init(TIM2,&TIM_OCInitStruct);
TIM_OC4Init(TIM2,&TIM_OCInitStruct);
TIM_OC3PreloadConfig(TIM2,TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM2,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2,ENABLE);
TIM_Cmd(TIM2,ENABLE);
}
下面是輪子向前轉的代碼
void car_go(void)
{
TIM_SetCompare3(TIM2,200);
TIM_SetCompare4(TIM2,200);
}
至于輪子的左轉、右轉、后退只需通過控制輪子轉向與轉速即可
二.電源降壓模塊
我用的是從實驗室找到的LM2596S DC可調降壓模塊
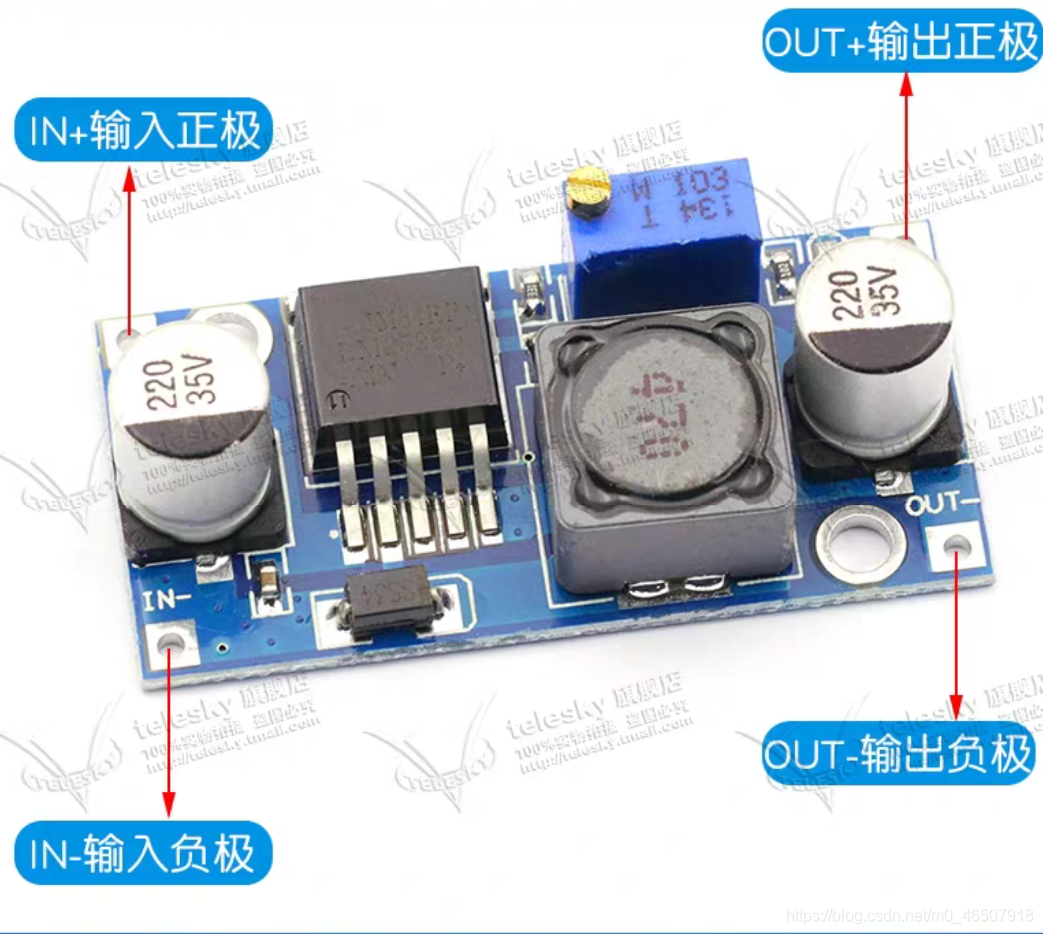
可以看到一共有四個引腳,IN+\IN-是輸入端,分別接到電源的正負極,out+\out-是輸出端,分別接到c8t6的5v或3.3v和GND,
特別注意:
1.輸入、輸出不可接反,接反可能會啥訓芯片
2.輸入的電壓必須比要輸出的電壓高1.5v以上,且不能用來升壓,
當降壓值為達到我們所需要的電壓值時,我們可通過轉動模塊上的小黃色柱體,來調節降壓值,如圖所示
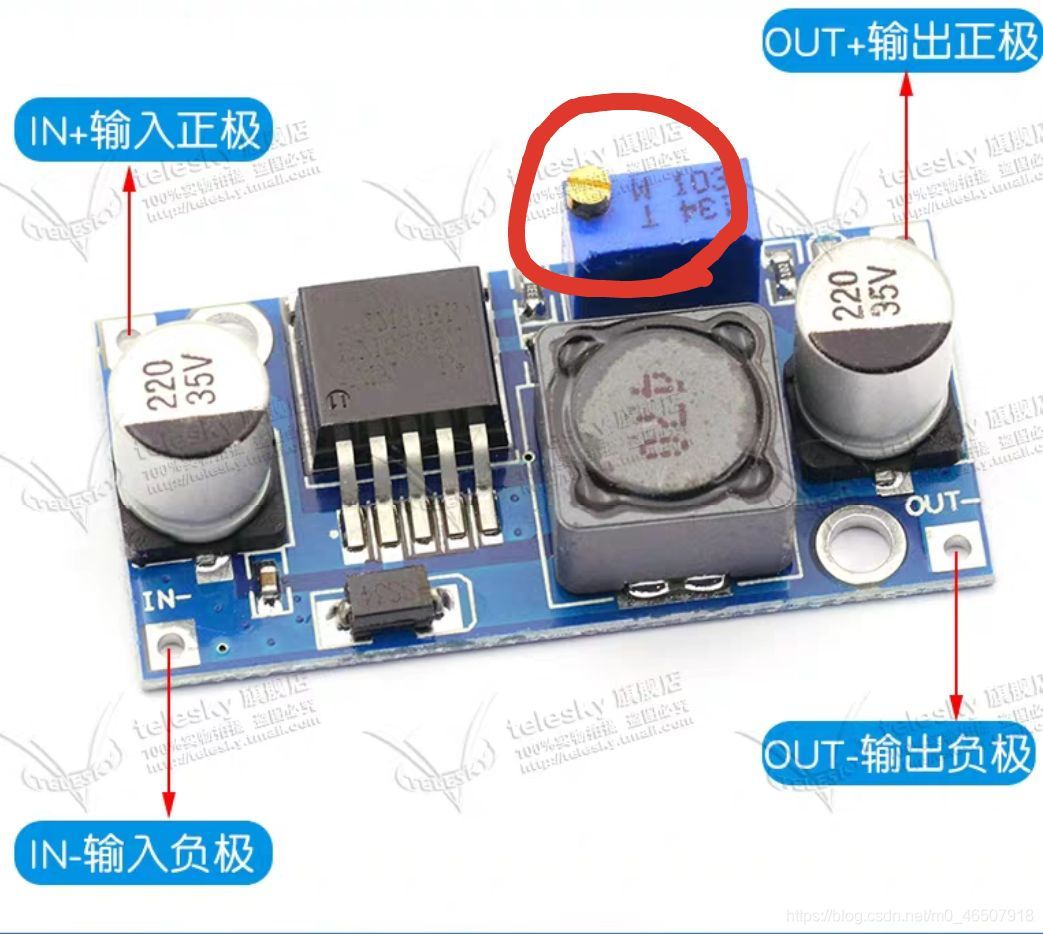
逆時針旋轉是降壓幅度增大,順時針旋轉是降壓幅度減小,
了解了這兩個模塊,就可以把c8t6,tb6612,電池,降壓模塊,以及兩輪小車連接起來,實作小車的基本走動了,
本人小白一個,文中如有錯誤還請見諒,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qianduan/194302.html
標籤:其他
上一篇:LoRaWAN地區引數