以三組IMU(慣性測量單元)模塊為基礎實作肢體動作捕捉。提升人機互動的靈活度及自由度,例如在游戲中實作角色與玩家的動作同步或用于機械臂同步控制、牽引控制等。支持拓展,兼容第三方設備的姿態資料融合。

獨有的初始化演算法,可直接找到不同模塊之間的初始姿態偏差。可直接使用非絕對姿態(如六軸IMU模塊、未校準的九軸IMU模塊、其它使用獨立參考系的模塊)的姿態資料進行計算。降低裝配或穿戴要求,免去重復校準的麻煩。
產品介紹
一、硬體
a) X-Unit(姿態計算單元)
由“IMU+MCU”構成,獨立計算自身的運動姿態,輸出右手坐標系下的四元數。僅支持I2C通信。可通過I2C(Master)控制單元開始/停止運算、校準、獲取當前姿態、IAP更新韌體。MCU不做加密,保留了SWD介面,有需要可擦除或重新覆寫整顆芯片。
b) X-Core(主控)
可通過USB或串口與上位機通信。串口可連接USB轉串口模塊或其它無線透傳模塊。上位機可以控制運算啟停、校準所有連接的計算單元、IAP更新主控及計算單元的韌體、接收運算結果。
默認使用USB供電,預留了電源介面,可根據需要自行焊接電池。

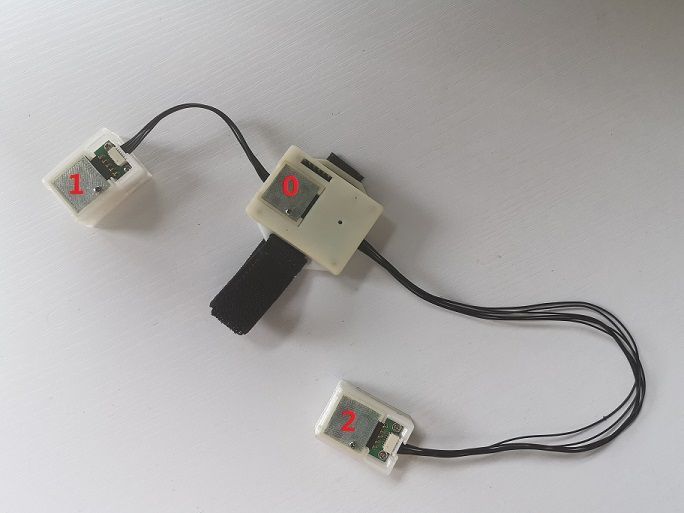
默認連接三個姿態計算單元。可根據需求去掉下圖中的1號或2號計算單元,但必須保留0號計算單元。其中1號計算單元可替換為動捕手套(后期即將上線),或連接符合通信協議的拓展外設(如手柄)。
二、軟體服務
a) 運算模式
X-Core的運算模式分為兩種:“直接輸出單元姿態”和“初始化單元姿態偏差”。
1) 直接輸出單元姿態
默認運行該模式。主控實時采集每個單元的原始姿態資料,并直接發送給上位機,輸出頻率最高可達200Hz。
2) 初始化模塊姿態偏差
在動捕運用領域,需要獲得每個姿態計算單元之間在初始位置下的姿態偏差。上位機可隨時發送指令讓主控進入該運算模式,計算完成后輸出計算結果并回到默認的“直接輸出單元姿態”模式,參加演示視頻。上位機根據每個單元的實時姿態、初始位置下的姿態偏差,結合反向運動學即可實作肢體的動作捕捉。
如需融合第三方硬體的姿態,可通過I2C按規定協議與主控通訊,也可以通過USB或串口在該模式下將姿態資料實時發送至主控。第三方硬體的姿態資料必須為右手坐標系下的四元數。
b) 韌體更新
提供韌體更新軟體。通過USB口與PC連接,利用軟體完成主控及姿態運算單元的韌體更新。支持韌體版本向下更新、強制更新。若更新程序意外中斷,硬體重新上電后會自行恢復至原來的版本。
三、資源
a) 設計檔案
提供所有線路板及外殼的CAD檔案。如有需要可申請硬體的原理圖、PCB檔案、BOM表;
提供工程案例中涉及到的機械臂CAD檔案。
b) 工程案例及原始碼
提供Processing、Unity、ROS下的工程案例及原始碼。不定期增加及更新工程案例及原始碼。
c) 資料
提供硬體規格書、協議、使用說明書;
提供關于IMU的入門、姿態融合演算法等資料;
提供關于動作捕捉的入門、反向運動學資料;
提供在Unity及ROS下實作骨骼系結及機械臂同步/牽引控制的教程;
提供在Unity及ROS下匯入機械臂模型或建模的指導教程。
四、發貨清單
官方售價 380元/套 可自行 淘寶搜索 最小動捕模塊
X-Unit x 3
X-Core x 1
X-Unit 連接線 x 2
Micro USB資料線 x 1
魔術貼松緊綁帶 x 3
注意:不含電池;產品外殼全部為3D列印成形。
最小動捕系統(演示)-科技-高清完整正版視頻在線觀看-優酷 https://v.youku.com/v_show/id_XNDI4MzcyNzgyNA==.html?spm=a2h0k.11417342.soresults.dposter
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/100132.html
標籤:硬件設計
上一篇:找個ARM9老師幫助一下