本人在碩士階段做了一個關于利用STM32采集人體手臂肌電信號(SEMG)來識別5種手臂動作,并控制假手動作的課題,現已完成,若有人需要交流經驗,可以企鵝:2836-712-962。
題目:基于STM32的肌電信號假肢控制器設計
關鍵詞:ARM;表面肌電信號;特征提取;假肢控制;BP神經網路
本課題提出一種基于ARM的肌電假肢控制器設計方案,僅用2個肌電傳感器實作5種動作模式的在線識別,分別是手掌上翻、下翻、握拳、展掌和無動作。系統分為硬體部分和軟體部分,硬體部分主要包括:系統電源模塊、處理器最小系統模塊、信號放大調整模塊和串口通信模塊等;軟體部分主要包括:信號A/D采集、IIR濾波、信號特征提取、BP神經網路識別等。
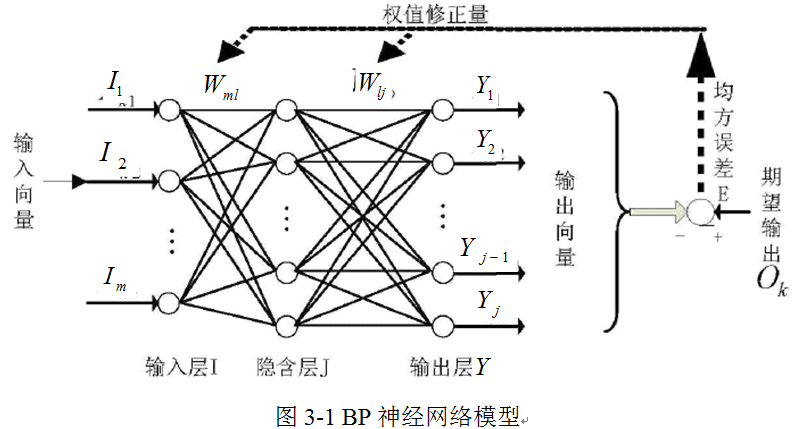
系統首先通過2個肌電傳感器分別采集橈側腕屈肌和尺側腕屈肌的SEMG信號,由于原始SEMG信號微弱且是正負信號,所以要對此進行信號放大和調整,再輸入到ARM核STM32處理器進行A/D采樣。然后,在處理器中,利用IIR數字濾波器對采集到的SEMG信號進行帶通濾波,并提取4種時域和頻域特征值,分別為信號幅度絕對平均值(MAV)、信號標準差(SD)、中值頻率(MF)和平均功率頻率(MPF)。再后,將2路SEMG信號的4種特征組成一個8維特征向量,利用Matlab訓練BP神經網路獲得權值和閾值系數,根據BP網路輸入層到隱層、隱層到輸出層的傳遞函式公式,STM32對權值和閾值進行相應運算,得出對應5種動作的在線識別結果。最后根據識別結果串口輸出控制信號控制假肢做相應動作。
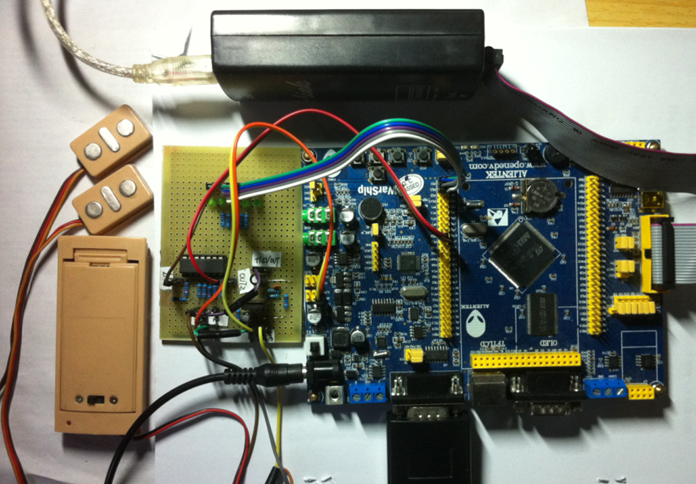
采用的肌電傳感器:

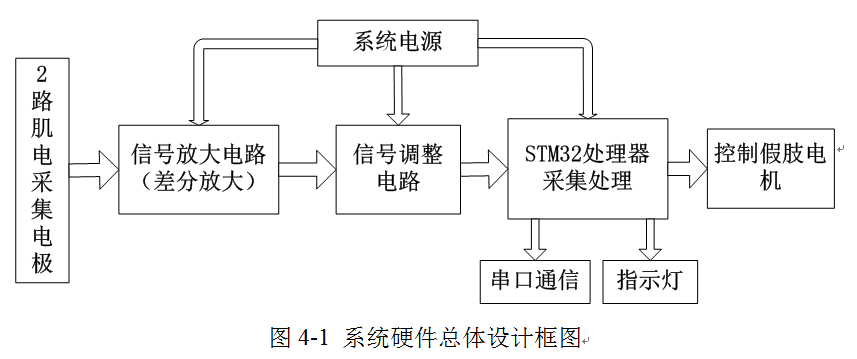
整體硬體設計:
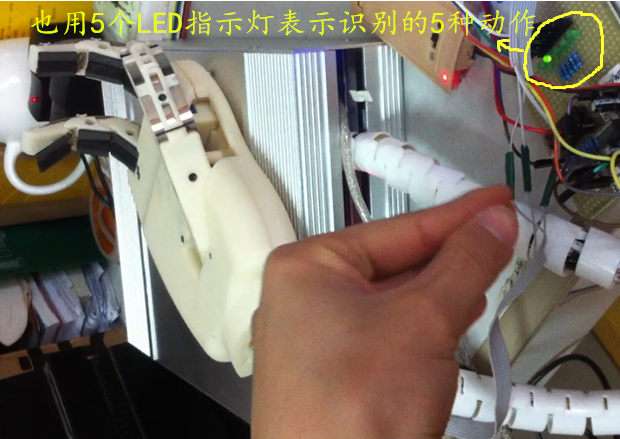
在線實驗,在線識別動作,并LED指示,并驅動假手動作:
uj5u.com熱心網友回復:
你好,我也打算畢業設計做一個類似肌電采集控制的系統,不知道樓主有沒有些參考資料
uj5u.com熱心網友回復:

uj5u.com熱心網友回復:
學長,在這里遇見你了,打個招呼
uj5u.com熱心網友回復:
卜學長,你有時間時問你下問題,我做的你的這個專案不知道為什么燈不亮?向前輩請教uj5u.com熱心網友回復:
用arduino如何呀uj5u.com熱心網友回復:
mark一下,以后有具體需求再聯系你轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/122127.html
標籤:單片機/工控
上一篇:前端面試題(重點整理):談談你對web標準和W3c的認識、什么是ECMA、什么是html、瀏覽器和開發工具介紹
下一篇:STM32F407ZG核心開發板