Traceback (most recent call last):
File "/usr/local/lib/python3.5/dist-packages/tensorflow/python/client/session.py", line 1322, in _do_call
return fn(*args)
File "/usr/local/lib/python3.5/dist-packages/tensorflow/python/client/session.py", line 1307, in _run_fn
options, feed_dict, fetch_list, target_list, run_metadata)
File "/usr/local/lib/python3.5/dist-packages/tensorflow/python/client/session.py", line 1409, in _call_tf_sessionrun
run_metadata)
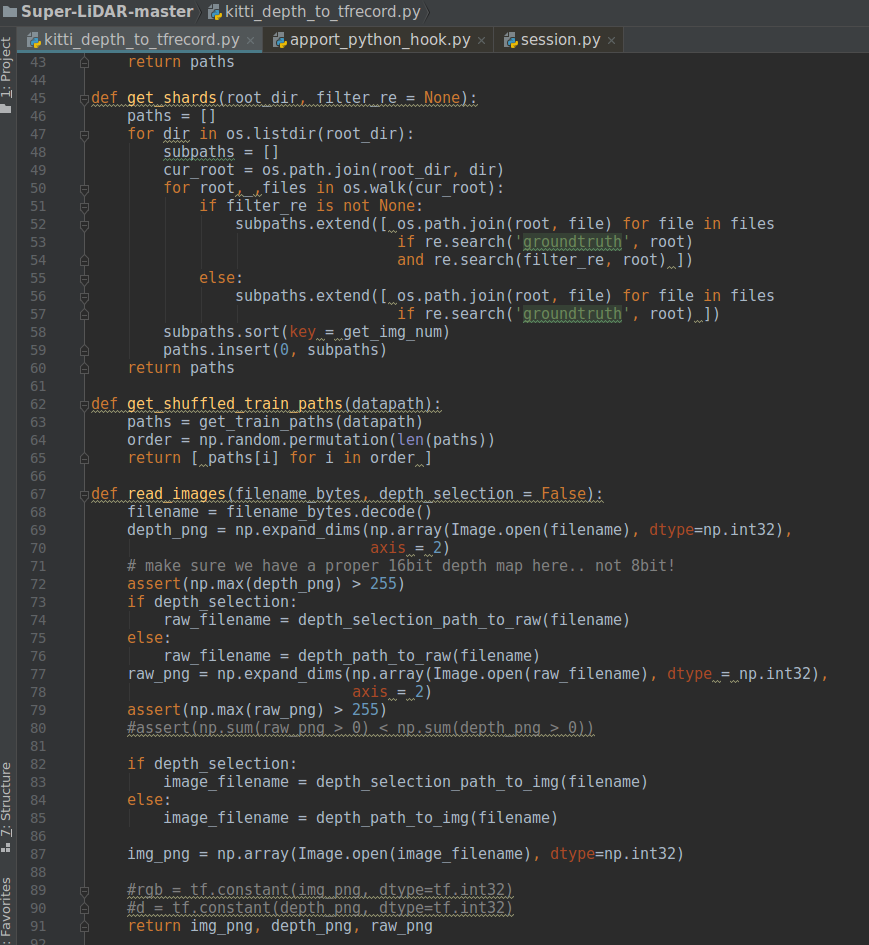
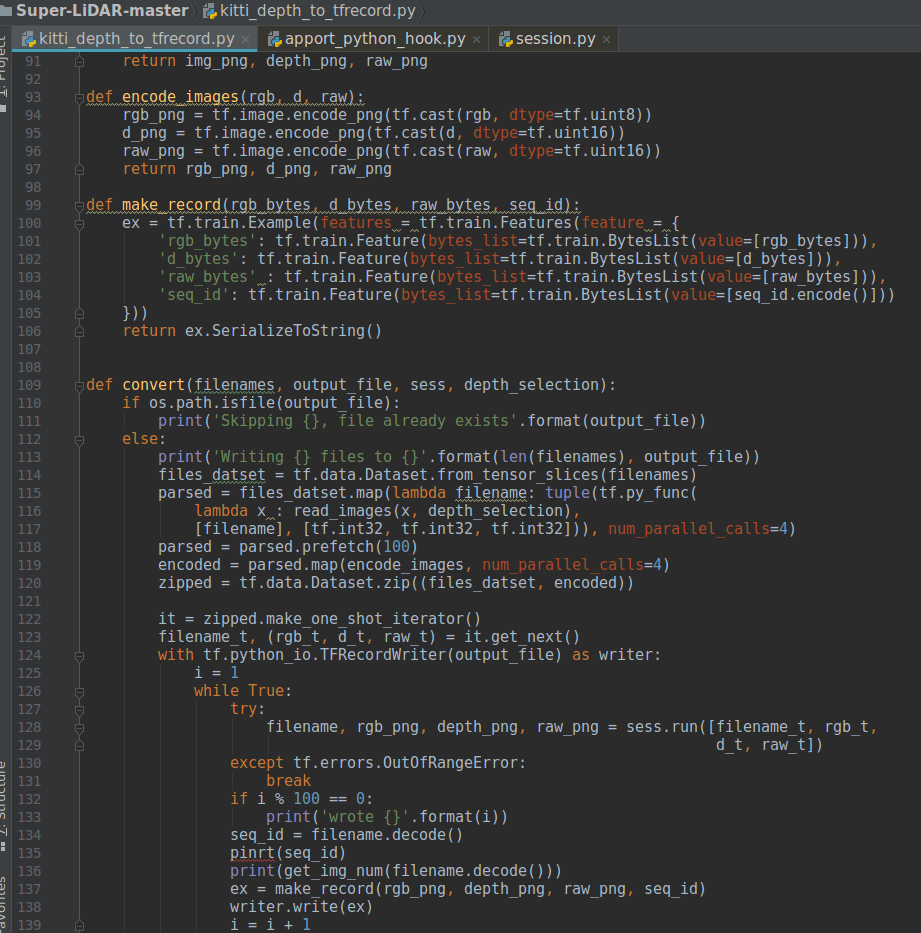
tensorflow.python.framework.errors_impl.InvalidArgumentError: image must be 3-dimensional[370,1224]
[[Node: EncodePng = EncodePng[T=DT_UINT8, compression=-1](Cast)]]
[[Node: IteratorGetNext = IteratorGetNext[output_shapes=[[], [], [], []], output_types=[DT_STRING, DT_STRING, DT_STRING, DT_STRING], _device="/job:localhost/replica:0/task:0/device:CPU:0"](OneShotIterator)]]
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/home/omnisky/Downloads/pycharm-community-2018.2.4/helpers/pydev/pydevd.py", line 1664, in <module>
main()
File "/home/omnisky/Downloads/pycharm-community-2018.2.4/helpers/pydev/pydevd.py", line 1658, in main
globals = debugger.run(setup['file'], None, None, is_module)
File "/home/omnisky/Downloads/pycharm-community-2018.2.4/helpers/pydev/pydevd.py", line 1068, in run
pydev_imports.execfile(file, globals, locals) # execute the script
File "/home/omnisky/Downloads/pycharm-community-2018.2.4/helpers/pydev/_pydev_imps/_pydev_execfile.py", line 18, in execfile
exec(compile(contents+"\n", file, 'exec'), glob, loc)
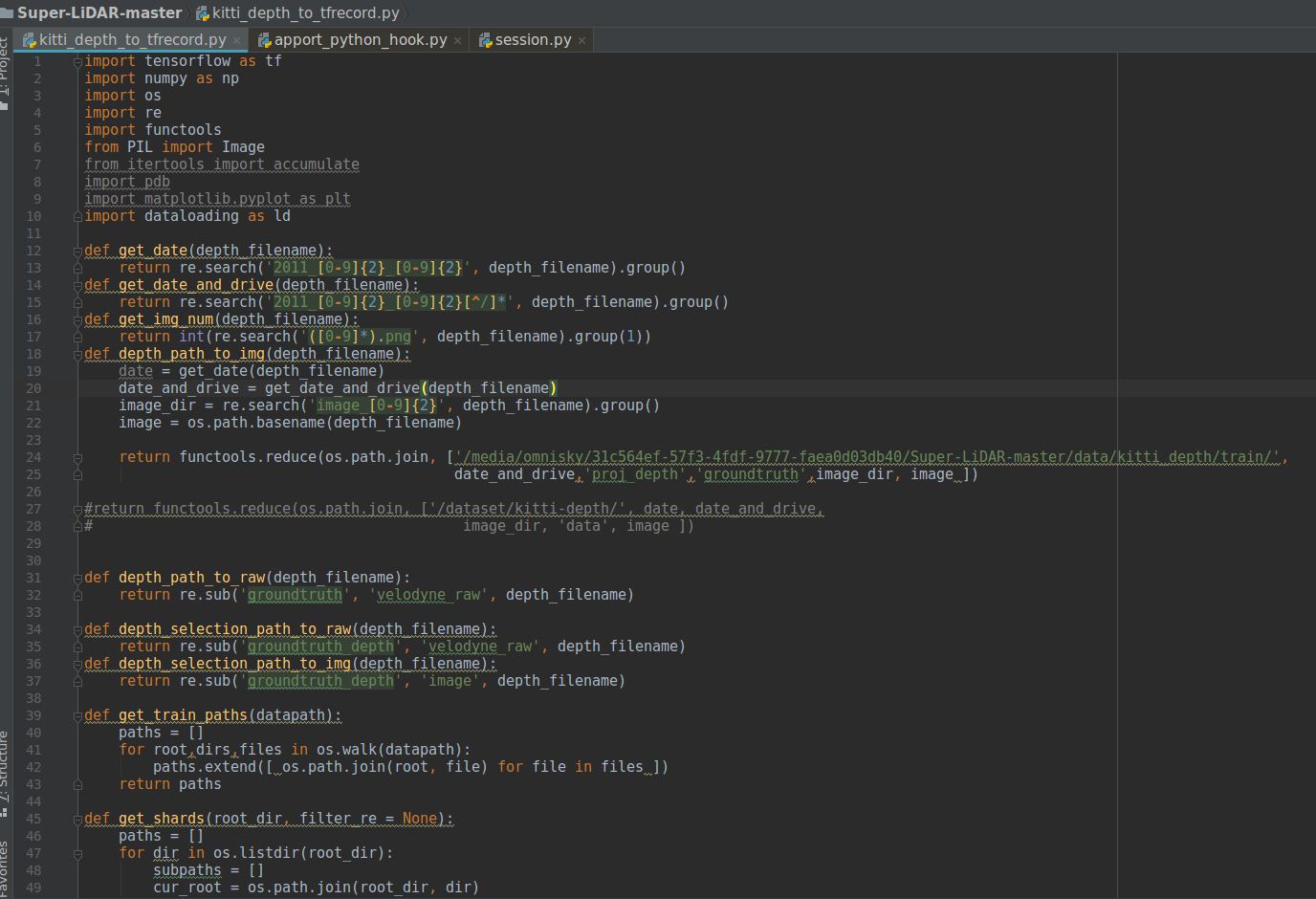
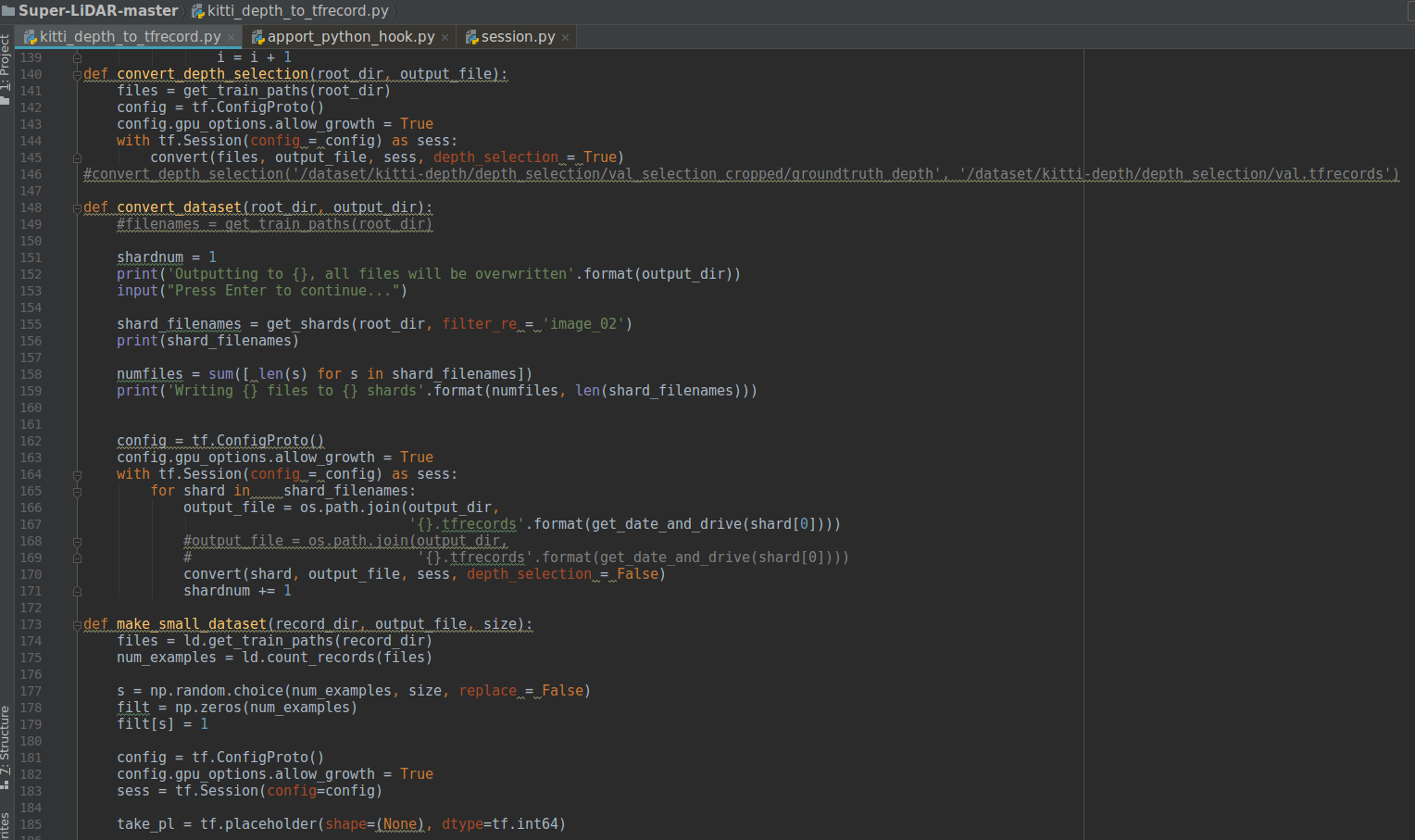
File "/media/omnisky/31c564ef-57f3-4fdf-9777-faea0d03db40/Super-LiDAR-master/kitti_depth_to_tfrecord.py", line 214, in <module>
'/media/omnisky/31c564ef-57f3-4fdf-9777-faea0d03db40/Super-LiDAR-master/data/tfrecord/train/')
File "/media/omnisky/31c564ef-57f3-4fdf-9777-faea0d03db40/Super-LiDAR-master/kitti_depth_to_tfrecord.py", line 170, in convert_dataset
convert(shard, output_file, sess, depth_selection = False)
File "/media/omnisky/31c564ef-57f3-4fdf-9777-faea0d03db40/Super-LiDAR-master/kitti_depth_to_tfrecord.py", line 129, in convert
d_t, raw_t])
File "/usr/local/lib/python3.5/dist-packages/tensorflow/python/client/session.py", line 900, in run
run_metadata_ptr)
File "/usr/local/lib/python3.5/dist-packages/tensorflow/python/client/session.py", line 1135, in _run
feed_dict_tensor, options, run_metadata)
File "/usr/local/lib/python3.5/dist-packages/tensorflow/python/client/session.py", line 1316, in _do_run
run_metadata)
File "/usr/local/lib/python3.5/dist-packages/tensorflow/python/client/session.py", line 1335, in _do_call
raise type(e)(node_def, op, message)
tensorflow.python.framework.errors_impl.InvalidArgumentError: image must be 3-dimensional[370,1224]
[[Node: EncodePng = EncodePng[T=DT_UINT8, compression=-1](Cast)]]
[[Node: IteratorGetNext = IteratorGetNext[output_shapes=[[], [], [], []], output_types=[DT_STRING, DT_STRING, DT_STRING, DT_STRING], _device="/job:localhost/replica:0/task:0/device:CPU:0"](OneShotIterator)]]
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/144709.html
標籤:機器視覺
上一篇:R語言用pplot和for回圈畫圖如何分別添加每個圖y軸的范圍
下一篇:GitHub無法下載