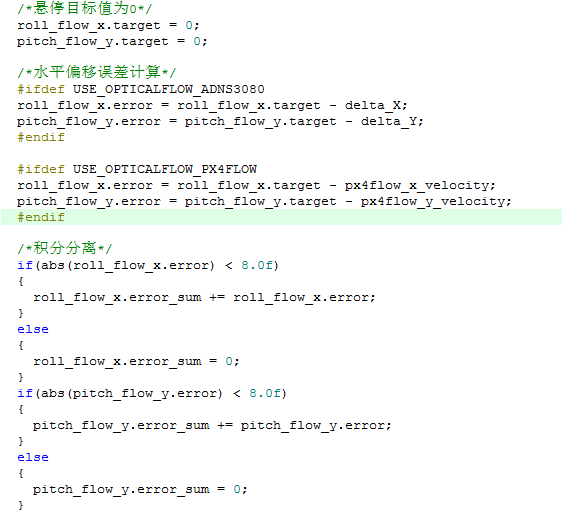
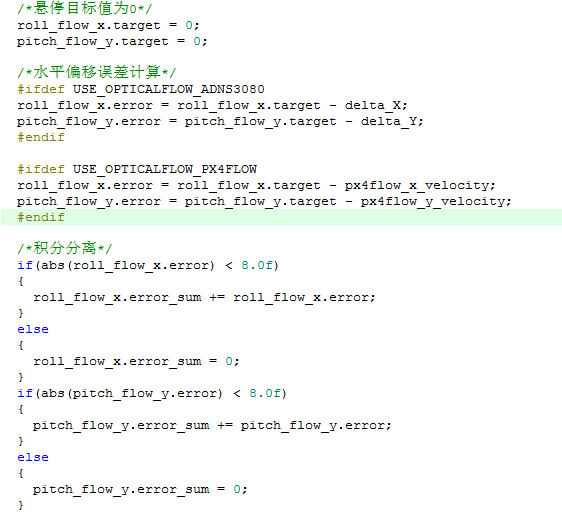
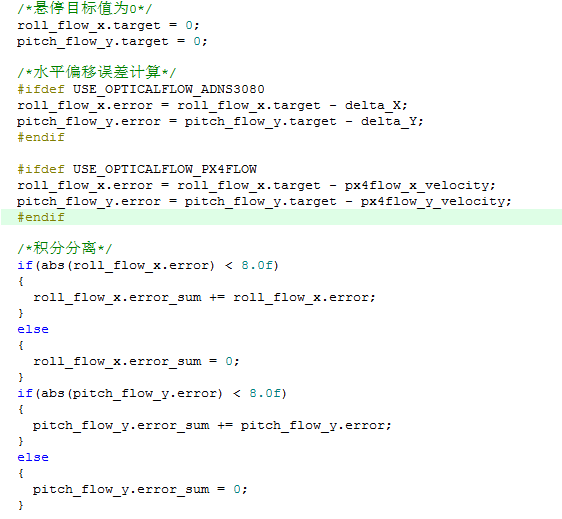
1. 分別計算x和y方向的速度誤差(目標速度為0)
2. 累計誤差(用于積分),累計誤差需要限幅(誤差無限累計后會造成溢位,導致積分環節出錯。比如有符號數溢位,輸出突變)
3. 計算PID
output= p* error+ i* error_sum+d*( error- error_old);
4. 輸出限幅(防止輸出超過pwm的調節范圍)
5. 保存當前誤差
error_old =error
程式
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/145932.html
標籤:單片機/工控