高超聲速飛行器是指飛行馬赫數大于5的飛行器,它是一種近空間飛行器,“近空間”可簡單理解為:現有飛機飛行的最高高度(約20Km)和衛星運行軌道的最低高度(約100Km)間的空域,近空間飛行器可定性描述為:能持久穩定運行于近空間執行特定任務的各種飛行器,近空間飛行器的發展涉及國家安全與和平利用空間,是目前國際競相爭奪空間技術的焦點之一,是綜合國力的體現,近空間飛行器的出現將促生新的作戰樣式,改寫聯合作戰理論,并對未來技術區域戰爭產生重大影響,
高超聲速飛行器與常規的飛行器相比其整體布局采用機身發動機一體化設計,這使得各個子系統之間具有更強的耦合性和非線性,為了滿足高超聲速飛行器在復雜的飛行條件下仍然擁有穩定的飛行性能和良好的飛行品質,必須采用全新的控制手段,
本文主要對高超聲速飛行器模型進行分析,采用極點配置方法、LQR控制與控制三種方法設計控制器,并比較反饋系統之間的調節性能和抗干擾性能,
從高超聲速飛行器縱向運動方程中的狀態來看,可以將5個狀態分成快慢不同的變數,轉動角速度矢量如俯仰角速率,由于該變數變化快,故稱之為快變數,快變數時為增加飛行器轉動阻尼所必須的;姿態矢量如迎角是慢變數,它的產生是由角速度矢量經過一次積分形成的,該狀態變數時大迎角機動控制和穩定所必需的;速度矢量如飛行速度比姿態矢量還慢稱之為較慢變數,因為它的產生是由推力和相對于速度軸的姿態矢量產生的法向力和側向力經一次積分后形成的,該狀態時控制飛行軌跡所必須的,
根據式(2.7)中的系統矩陣A,用Matlab可求出開環系統的5個特征根為:,,,,,可知系統存在一個正實數的極點,該極點對應的模態為短周期模態,對應的狀態為快變數,此極點說明高超聲速飛行器縱向模型是不穩定的,這樣設計的目的是為了提高飛行機動性能,高超聲速飛行器在低速飛行時,開環特性是穩定的,但隨著馬赫數的增加,開環特性趨于不穩定,事實證明,馬赫數越高,不穩定極點個數有增加的趨勢,同時系統存在一個幾乎和原點重合的極點,該極點對應狀態量h,這表明高度的變化引起的空氣密度和靜壓的變化較小,此外,系統還存在一對很特殊的極點,這對極點非常靠近虛軸,該類極點對應慢變狀態,對應的模態為長周期模態,表明高超聲速飛行器具有一種緩慢的飛行航跡振蕩特性,由于高超聲速飛行器縱向模型是不穩定的系統,若不對其進行控制,系統則毫無意義,必須要設計控制器使其穩定且有較好的性能,
3.1 極點配置理論依據
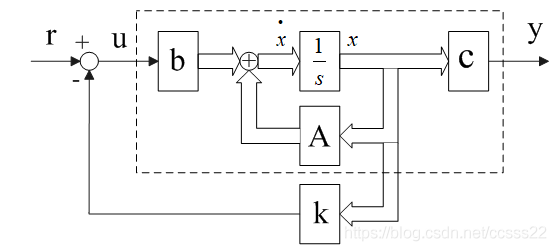
控制系統的性能主要取決于系統極點的位置,它包含了系統的穩定性、周期、阻尼等動態特性資訊,作為系統性能指標的一種形式,往往是給出一組期望極點,而極點配置就是對于給定物件的狀態模型,通過選擇狀態反饋矩陣,使倍訓系統的極點配置到期望的極點位置上,以便獲得所需要的較好的動態性能,
并得到相應的階躍回應如下圖(相關Matlab程式見附錄):
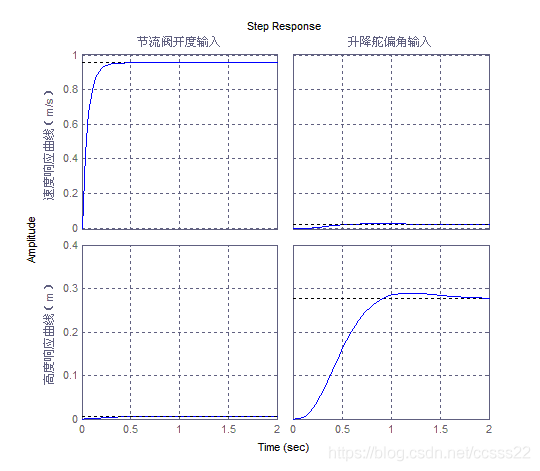
圖3.2 兩個輸入分別對系統階躍所產生的回應
狀態反饋一般不能跟蹤輸入指令,若輸出負載有輕微的擾動則將不能跟蹤輸入,下面為保證輸出跟蹤輸入指令,引入了相應的內模模塊,實際上還應該加入相應的增益使之保持穩定,這里為方便起見設增益為1,將上述k矩陣代入狀態反饋,得到下面仿真結構圖:
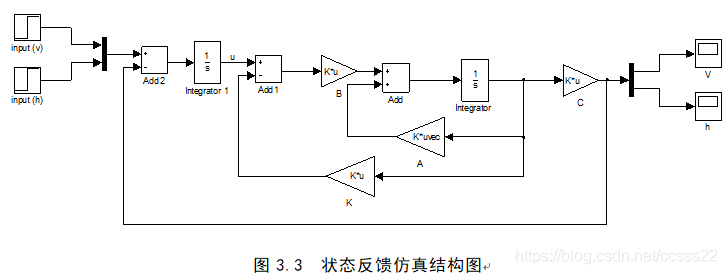
以上結構圖中的A,B,C,k均為矩陣,分別對速度和高度進行階躍回應,取,,仿真后得到速度回應曲線與高度回應曲線的仿真圖:
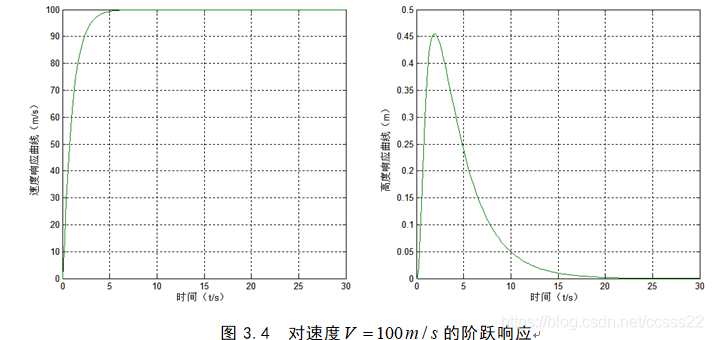
從上述組圖中可以得出以下結論:
(1)分別對速度和高度進行階躍回應與速度和高度同時對系統進行階躍回應所得出的仿真結果基本相同,這也再次驗證了節流閥開度對速度起主導作用,升降舵偏角對高度起主導作用,但是極點配置后的系統一般不能跟蹤輸入,需要引入積分器才能使系統無靜差,但加入積分器勢必會導致系統動態性能變差,甚至使系統不穩定,
(2)期望倍訓極點的位置綜合反映了回應速度和干擾及噪聲的敏感度,即提高系統回應速度,則干擾和噪聲的影響通常會增加,這就需要根據實際系統的需要權衡利弊,并且反復試湊比較得出期望極點的位置,
(3)系統進行極點配置后,首先系統是穩定的,階躍回應曲線也較好,但這取決于倍訓極點的位置,因為倍訓極點決定著回應速度,而倍訓極點的選取需要多次試湊才能得到較為滿意的結果,因此極點配置方法具有一定的盲目性,
本文針對高超聲速飛行器縱向模型,分別進行了極點配置,LQR控制器和控制器的設計,并給出了相應的仿真及其性能分析,三種控制器的側重點各有不同:極點配置法能很直觀的在系統完全能控前提下任意將系統極點配置到期望的極點,通過試湊法以使系統達到預期的性能,然而這種方法有較大的局限性,一般難以實作各種苛刻的性能指標;線性二次(LQR)最優控制是用最小的能量使系統性能達到“最優”,通過調整Q陣和R陣便能達到預期目標,尤其在對性能要求較高的場合有著廣泛的應用,但從上文我們也可得知,它對干擾的抑制不是很好;控制器的一個側重點在于其抗干擾性,從上文中我們也可得知其抗干擾能力很強,而動態性能略低于LQR控制器,
綜上所述,以上三種控制方法各有所長,不存在真正意義上的“最優”控制器,動態性能和抗干擾性能是存在矛盾的,良好的動態性能往往是要犧牲抗干擾性作為代價,從上文也能得到驗證,只有深入了解系統本身的特性,并根據實際情況才能設計出符合要求的控制器,
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/150942.html
標籤:其他
上一篇:MATLAB仿真