1.1 模糊編輯器操作
對于一個模糊控制系統,首先需要使用MATLAB自帶的模糊編輯器進行模塊規則的編輯,在MATLAB執行fuzzy,打開模糊編輯器,你可以看到如下的界面:
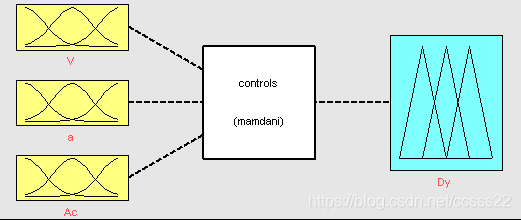
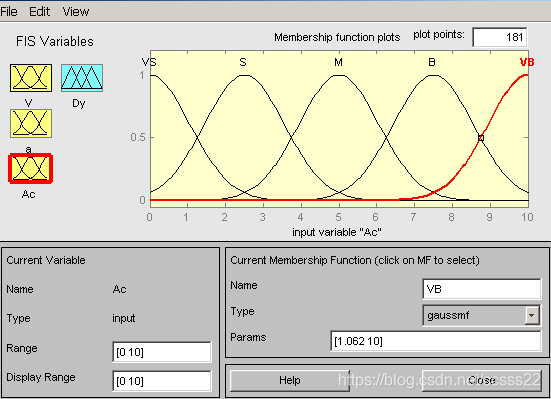
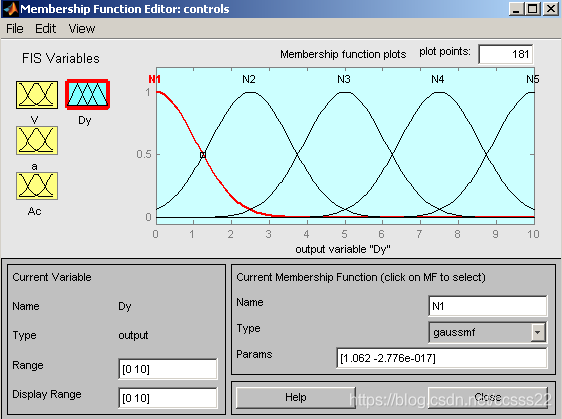
這個是模糊編輯器的基本界面,之后需要在模糊編輯器中設定模糊規則控制檔案,按照論文中的要求,這里有三個輸入一個輸出,且都其隸屬函式滿足高斯隸屬函式,再根據其值域變換范圍,得到如下的結果,
下面分別對三個輸出和一個輸出進行編輯,
雙擊打開輸入輸出編輯,得到如下的界面:
下面分別對三個輸入和一個輸出進行編輯,
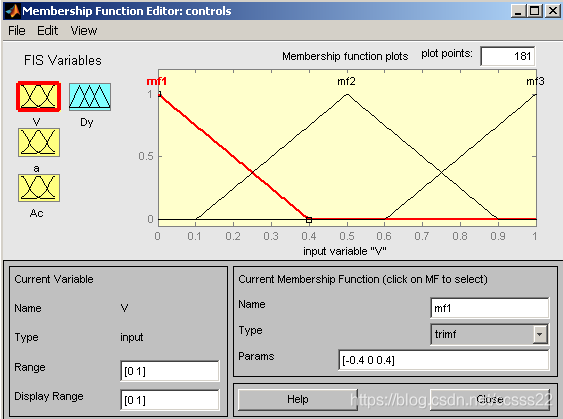
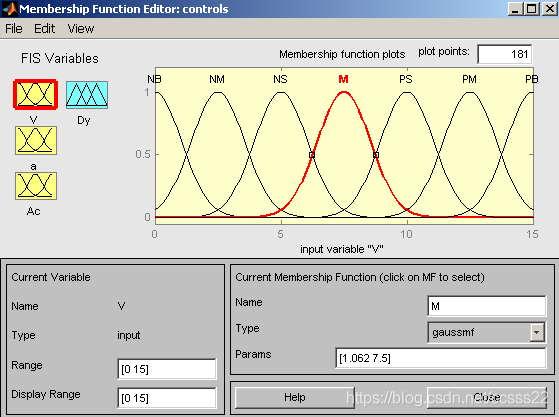
V:
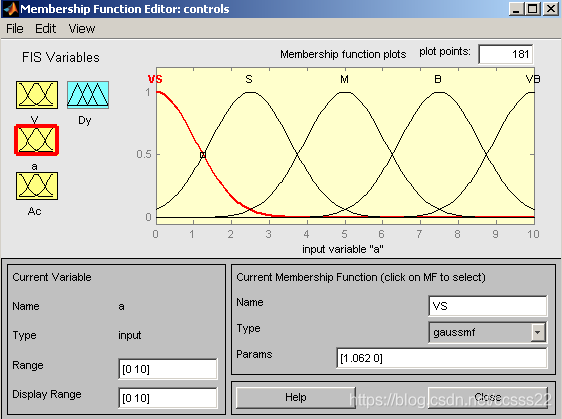
a:
Ac:
Dy:
然后雙擊打開控制器編輯器,得到如下的界面,開始進行模糊規則的輸入:
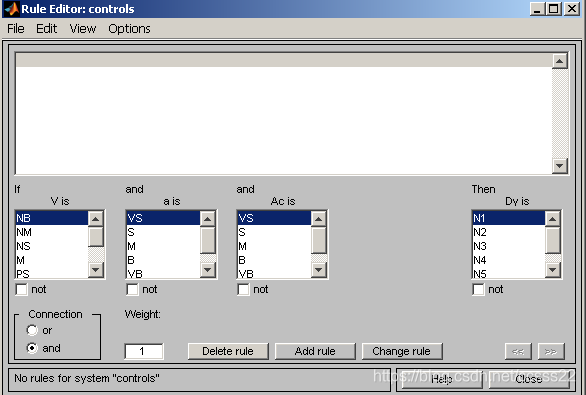
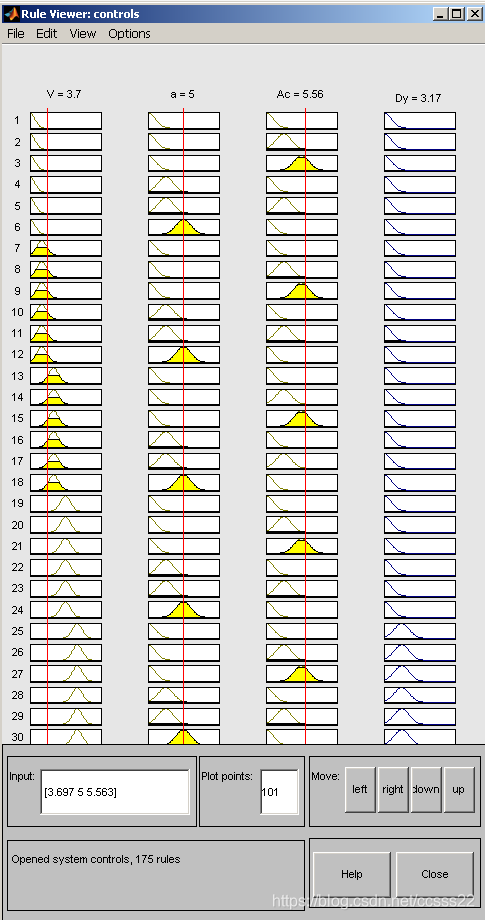
在里面輸入模糊控制規則,輸入完成后得到如下的結果:
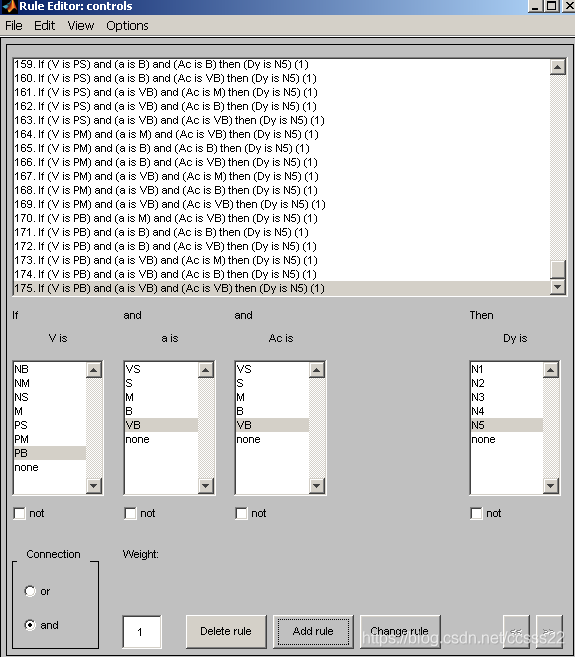
這里共輸入175條模糊規則,輸入完成后見如上的效果,
通過查看設定完的模糊規則如下所示:
將模糊規則檔案保存,可以得到fis檔案,

后面的設計,都將基于這個模糊規則檔案進行,
然后,我們將在Simulink中進行系統的設計,
1.2 系統的搭建
1.2.1模糊控制器的仿真與分析
為了方便分析,我們首先不將模糊控制得到的檔位值反饋給汽車,直接使用已知的速度來輸入到模糊控制器中,從而得到一個在開環條件下的結果,其結果如下所示:
|
V |
|
a |
|
模糊控制器 |
|
汽車檔位 |
|
Ac |
(注意,這個圖僅僅為示意圖,這里不要直接復制到你的論文中)
其在Simulink中進行搭建模型,其模型如下所示:
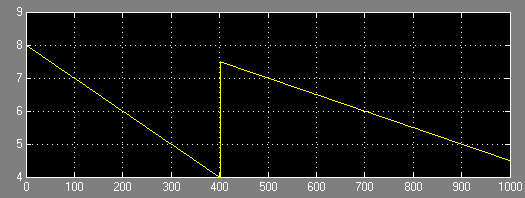
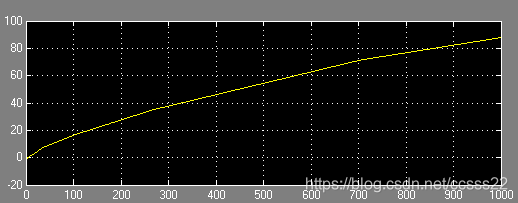
運行如上的模塊,可以得到如下的仿真結果,
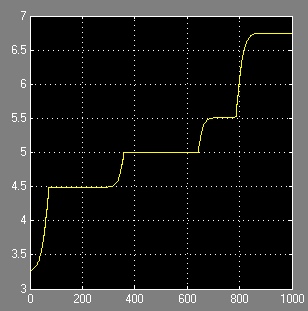
輸入的V,Ac,a
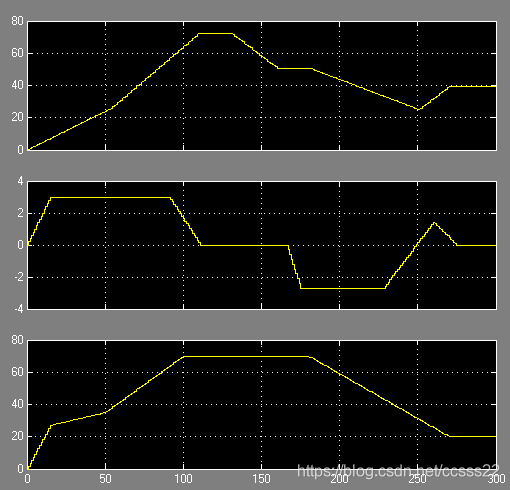
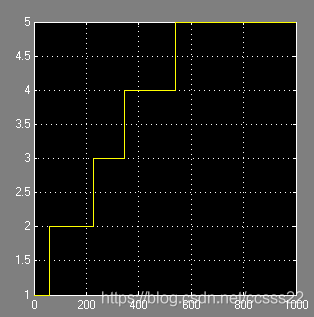
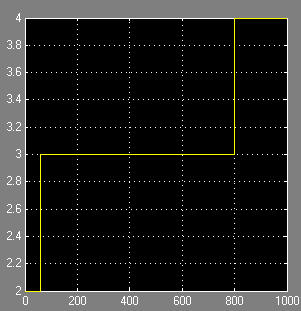
輸出的檔位:
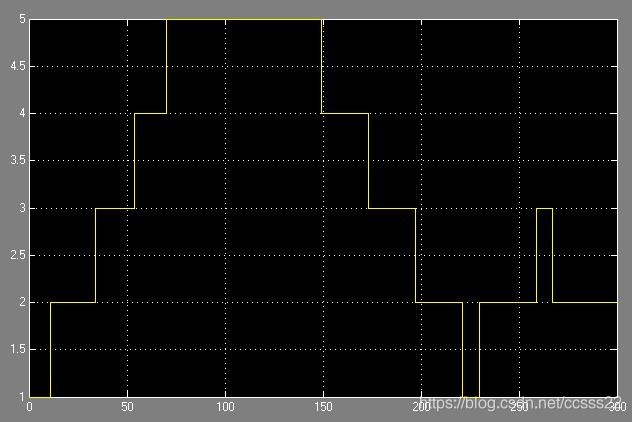
從上面的仿真結果可以看到,當系統為直接輸入的時候,得到的檔位資訊會出現突變,
其模糊規則表如下所示:
|
|
|
|
|
|
|
| |||||||||||||||||||||||||
|
| Ac | VS | S | M | B | VB | |||||||||||||||||||||||||
|
| a | VS S M B VB | VS S M B VB | VS S M B VB | VS S M B VB | VS S M B VB | |||||||||||||||||||||||||
| 1 | NB |
|
|
|
|
| |||||||||||||||||||||||||
| 2 | NM |
|
|
|
|
| |||||||||||||||||||||||||
| 3 | NS |
|
|
|
|
| |||||||||||||||||||||||||
| 4 | M |
|
|
|
|
| |||||||||||||||||||||||||
| 5 | PS |
|
|
|
|
| |||||||||||||||||||||||||
| 5 | PM |
|
|
|
|
| |||||||||||||||||||||||||
| 5 | PB |
|
|
|
|
|
注意,這個模糊規則表,是根據實際駕駛的情況得到的,不同的汽車和駕駛員,可能有不同的規則,這里只是給出一個標準的規則,
將規則輸入模糊編輯器,
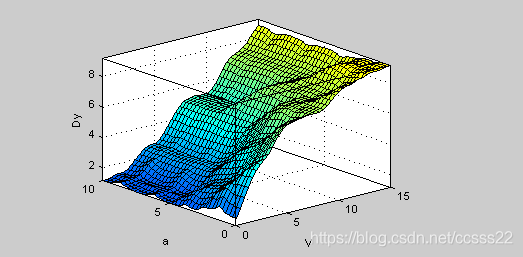
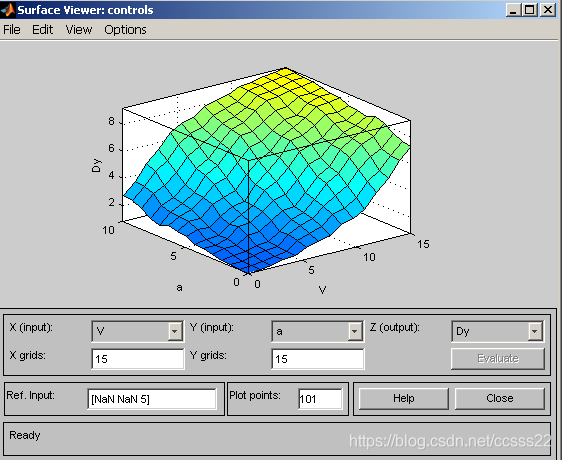
對應論文中的五個立體圖形如下所示:
輸入加速度為VB:
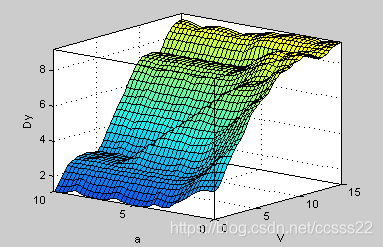
輸入加速度為B:
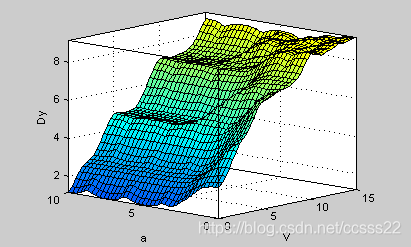
輸入加速度為M:
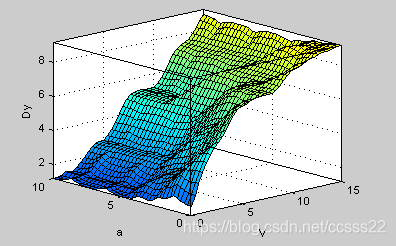
輸入加速度為S:
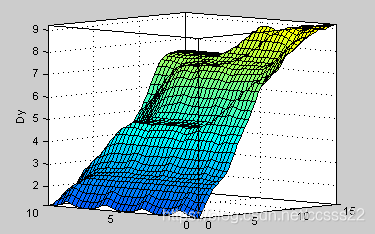
輸入加速度為VS:
這里幾個圖式在模糊編輯器中的surface給出的,和論文中存在一定的區別,
注意,這里Step1中式按照論文“AMT汽車模糊三引數換擋規律研究”中的
這個結構改變得到的,
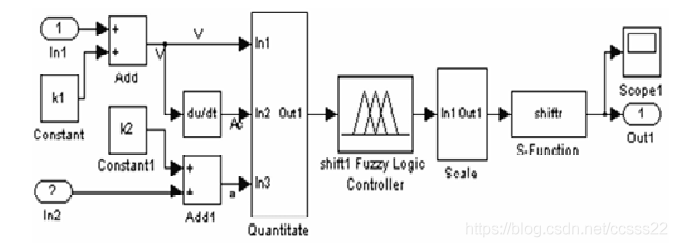
然后在simulink中搭建如下的平臺:
下面針對幾組情況進行測驗:
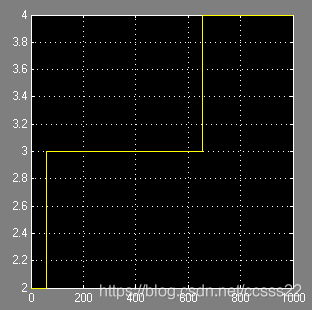
加速度為3的時候,換擋情況:
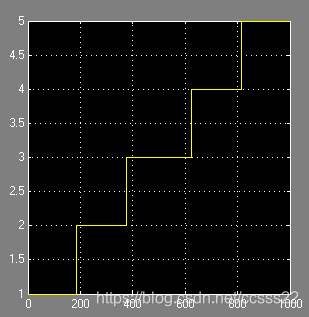
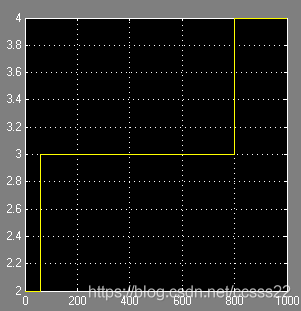
加速度為0的時候,換擋情況:
加速度為-3的時候,換擋情況:
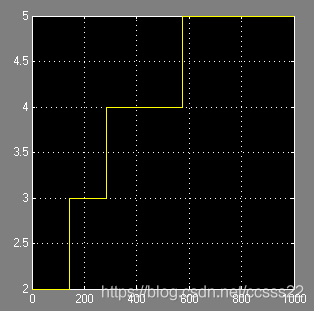
從上面的仿真可以看到,在加速度一定的時候,油門開度越小,汽車可以在較低速的時候達到高檔位,當油門開度一定的時候,加速度越大,達到高檔位的速度就越小,
這個仿真結果和我們的設計初衷一致,這說明仿真結果的正確性,
以上是模糊控制系統的仿真與分析,下面設計檔位切換模塊,根據模糊控制輸出的值和檔位的對于關系,設計檔位切換模塊,
通過仿真,上面的六個仿真結果對于的檔位圖如下所示:
下面,我們將整個系統進行設計與仿真,這個參考論文中的如下截圖:
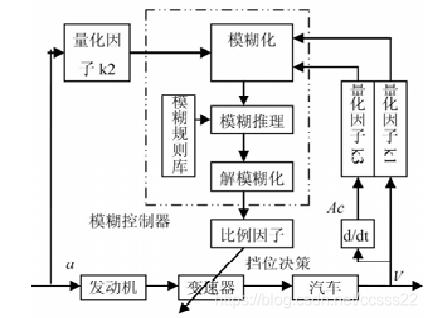
前面的設計實作了以上原理框圖的虛線部分,和量化因子部分,(由于“AMT汽車模糊三引數換擋規律研究”)中沒有提供整個系統的仿真效果,所以具體的仿真內容請參考
“基于模糊規則遞推的車輛自動換擋策略仿真研究”
這里,我們采取了簡化的設計結構,具體如下所示:
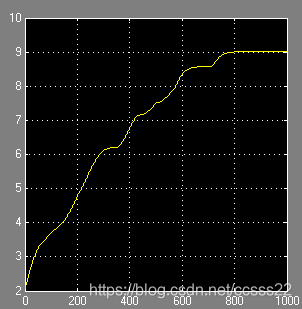
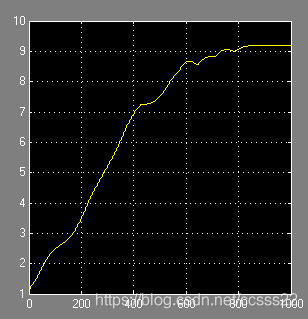
系統的仿真結果如下所示:
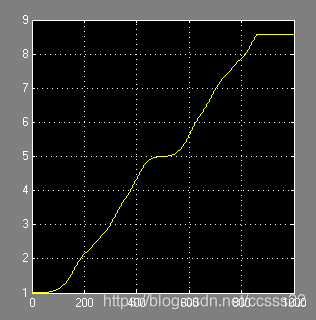
輸入的開度:
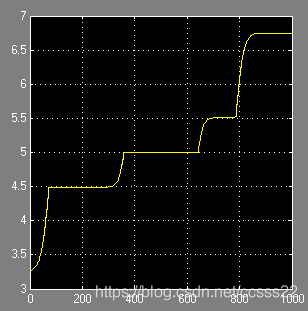
通過調整,其檔位自動調整如下所示:
汽車的速度變化如下:
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/150995.html
標籤:其他
上一篇:VSC8211