文章目錄
- 本課題的研究內容:
- 探地雷達原理
- 探地雷達影像預處理
- 影像傾斜矯正
- 均值法去背景原理與實作
- 影像分割技術
- 閾值分割技術的實作
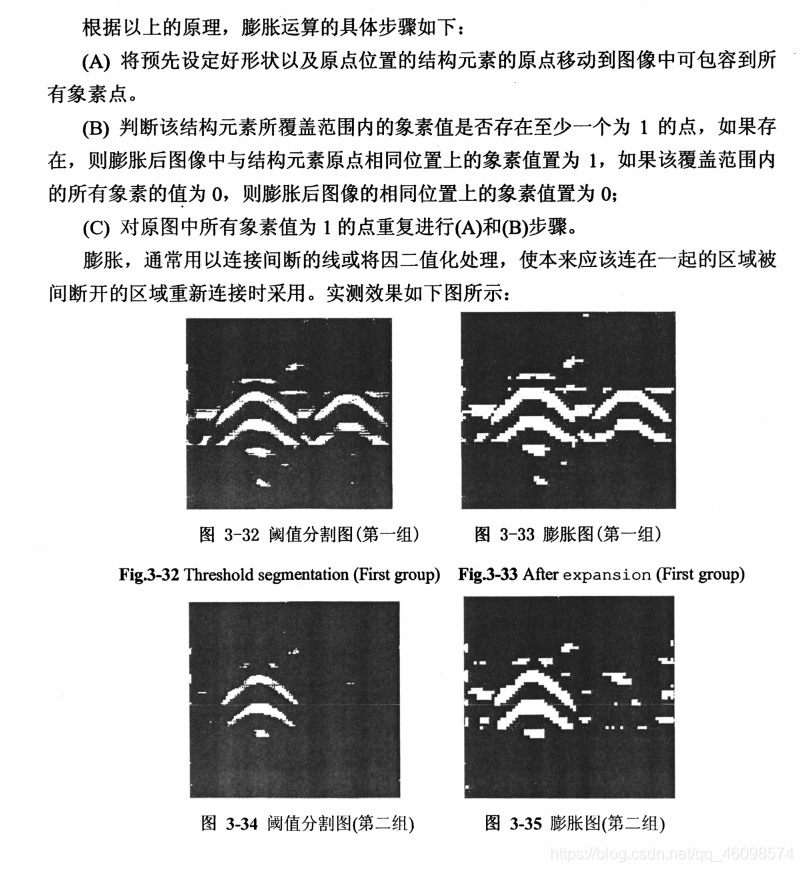
- 腐蝕與膨脹技術
- 探地雷達雜波抑制研究與實作
- 探地雷達合成孔徑成像
- 探地雷達目標識別
- 總結
本文為論文解讀,為2008年發布的基于傳統影像處理與識別論文,目標是探地雷達信號的識別,
本課題的研究內容:
1、討論了各種探地雷達雜波抑制方法,數字影像的基本理論和影像傾 斜矯正方法,重點介紹了均值法去背景這種最常用的雜波抑制方法,分析 實作了影像的分割技術、濾波技術以及腐蝕與膨脹技術,從淺地層探地雷 達影像的特點出發,提出一種基于影像處理技術抑制探地雷達雜波的方 法,
2、分析了淺地層探地雷達合成孔徑成像與普通雷達合成孔徑成像的不 同,研究了探地雷達合成孔徑成像時的一個重要引數——波速的估計問 題,使用了一種基于Hou曲變換的波速估計方法,在各種探地雷達合成 孔徑成像方法中,改進了一種快速微波全息合成孔徑成像方法,
3、介紹了針對B.scan的探地雷達目標識別與定位方法,在前述所提 雜波抑制的基礎上運用并實作了一種有效的特征提取方法和基于模糊聚 類分析的自動識別方法,并實作了一種基于視窗劃分的目標定位方法,
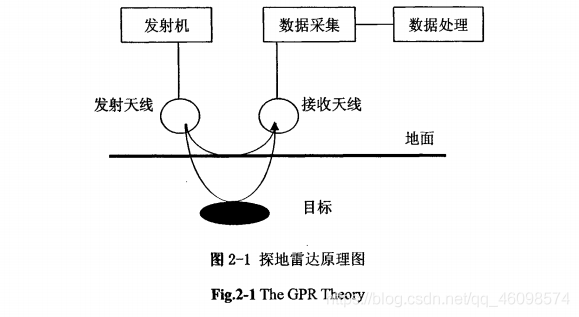
探地雷達原理
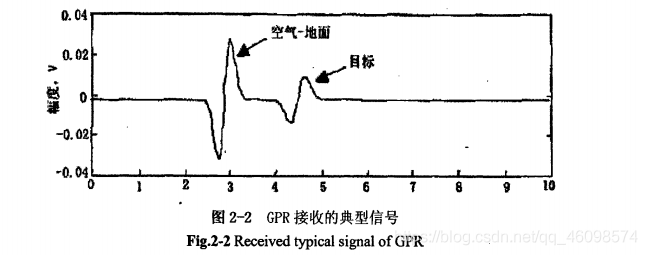
探地雷達(c№und Penetrating Radar簡稱GPR)是一種對地下或物體內不可見的目 標或界面進行定位的電磁技術,它利用高頻電磁波(106~109H萄,以寬頻帶短脈沖形 式由地面發射天線定向送入地下,電磁波在介質特性變化的界面上發生反射,通過接 收反射回波信號,根據其延時、形狀及頻譜特性等引數,解譯出目標深度、結構及性 質,在資料處理的基礎上,應用數字影像的恢復與重建技術,對地下目標進行成像處 理,以期達到對地下目標真實和直觀的再現, 探地雷達作業原理如下圖所示:雷達發射機通過發射天線向地下發射電磁波,遇 到地表及地下目標,由于介質的不連續性將會產生回波,接收天線接收到這些回波信 號,送到資料采樣系統進行采樣,采樣后的資料送處理系統進行各種處理,以判斷地 下目標的有無及相關特性,如圖2—1所示下圖是一個典型的GPR接識訓波,第一個也是最大的回波是空氣一土壤的界面引 起的,在時間上稍微靠后出現的回波是目標回波或淺地層的雜波,通過在地面移動天 線的位置,可以得到二維或三維的影像
GPR接收的典型信號
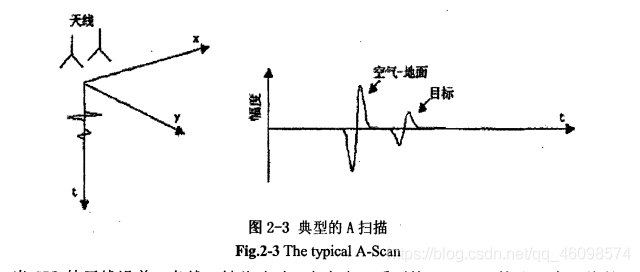
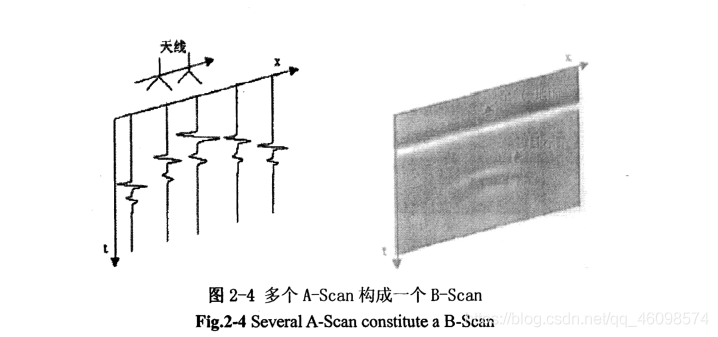
為了能夠成功地進行探測,GPR必須獲得足夠的信雜比(SCR)、足夠的信噪比 (SNR)、足夠的方位解析度和深度解析度,目前GPR的資料記錄一般都是一維、二 維或三維資料圖,而且采用的聲學術語為A-ScaIl、B.Scan和c.sc趾, 在一個給定的固定位置(‘,y,),通過GPR記錄的一個單一波形彳(t,y,,f)就稱之為 A-Scan,如圖2—3所示,波形中唯一的變數是時間,并且介質中的波速和深度有一 定的關系,當GPR的天線沿著一條線x軸移動時,會產生一系列的A—Scan,構成一個二維的 資料集稱之為B—Scan,如圖2—4所示,當接收信號的幅度通過灰度級描述 時,可以產生一個二維的影像,如圖,二維影像描述了土壤的一個垂直切面,時間軸 或相應的深度軸常指向下方,
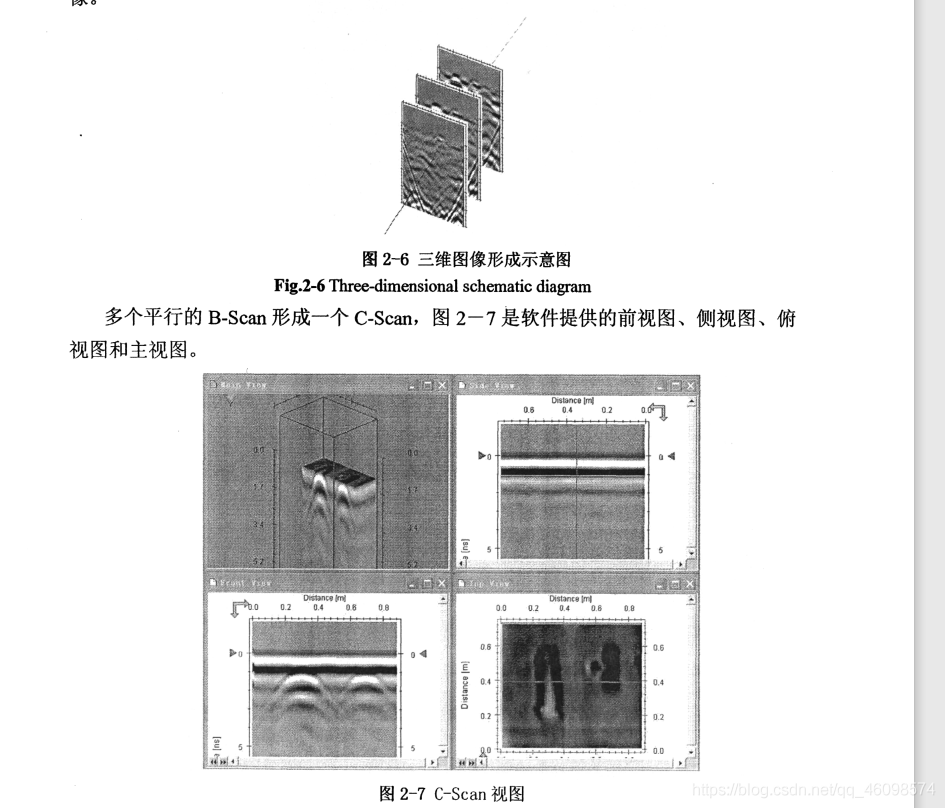
 通過收集多個甲行的曠Scan,或者在xy平面的柵格點上移動天線就得到一個三維的數掘集稱之為C—Scan(如圖2—6所示),通常情況下,Scan被描述成二維的影像,比如:在一個時刻畫出記錄資料的幅度就得到一個二維影像,影像是在一具體深度平行于記錄平面的水平切面
通過收集多個甲行的曠Scan,或者在xy平面的柵格點上移動天線就得到一個三維的數掘集稱之為C—Scan(如圖2—6所示),通常情況下,Scan被描述成二維的影像,比如:在一個時刻畫出記錄資料的幅度就得到一個二維影像,影像是在一具體深度平行于記錄平面的水平切面
探地雷達影像預處理
探地雷達雜波定義為:與目標散射特性無關,但與目標子波出現在同一采樣時間窗內且與目標子波有相似的譜特性的信號,因此探地雷達雜波可看作是除了目標回波以外的各種回波,通常包括天線直達波、地表回波、地下介質非均勻產生的回波、偽目標所產生的回波等等,探地雷達雜波嚴重影響了探地雷達的探測性能,使得對地下目標的探測變得非常困難,對于非金屬目標等淺地層埋地目標尤其如此,對于非金屬目標這類淺地層埋地目標,由于其體積小,金屬成分少,使得目標回波與地表回波相比是較弱的成分,因此抑制探地雷達雜波是探地雷達信號處理的首要任務
抑制探地雷達雜波就是要去除探地雷達資料中的非目標回波,使目標回波得到增強,從而有利于對埋地目標的探測,通常探地雷達雜波抑制重點針對地表回波及地下介質非均勻產生的回波等雜波成分,而對天線直達波、偽目標所產生的回波等雜波成分不作重點研究,這是因為對于一部實際使用的探地雷達,一般情況下天線直達波在各個A.scaIl資料上出現的時間與幅度均相等,是一個確定信號,可通過天線設計、加屏蔽及探地雷達資料減去一個定信號等方法加以去除,因此在探地雷達信號處理中不作重點研究,對于偽目標所產生的回波,需用目標識別的方法解決,不在通常的探地雷達雜波抑制研究之列,本章的雜波抑制研究也是如此,主要針對地表回波及地下介質非均勻產生的回波等雜波成分,此外本章所研究的方法都是針對B.scaIl資料,由于B—scaIl資料由多個A.scan資料組成,而多個B.scan資料又組成了C.scall資料,因此研究針對B.scall資料的方法最具代表性,
傳統上最常用且最簡單的均值法去背景是探地雷達雜波抑制方法中的一種,該方法對一些有規則的雜波有效,如平整光滑地表所產生的回波,由于在各個A.scan資料上所處的位置及幅度幾乎相同,這時用均值法很有效,
對于抑制探地雷達雜波,本章提出了一種基于影像處理技術抑制探地雷達雜波的方法,由于所依據的探地雷達影像特點具有不變性,使得該方法對各種探地雷達及各種介質情況都適用,因此通用性強,通過對實測資料進行處理,結果表明所提的方法取得了很好的效果,
影像傾斜矯正
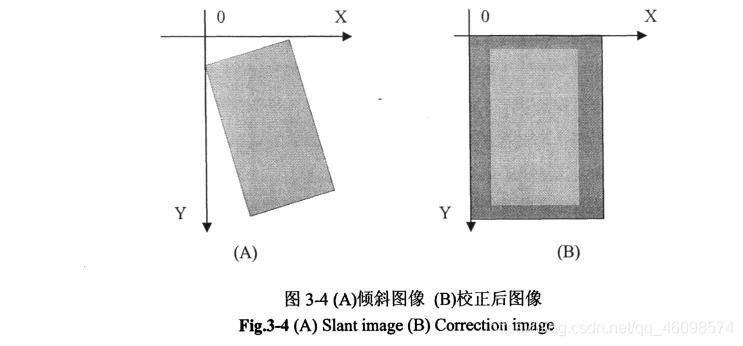
影像在處理之前可能會有傾斜,因此要對影像進行傾斜矯正,旋轉示意圖:
均值法去背景原理與實作
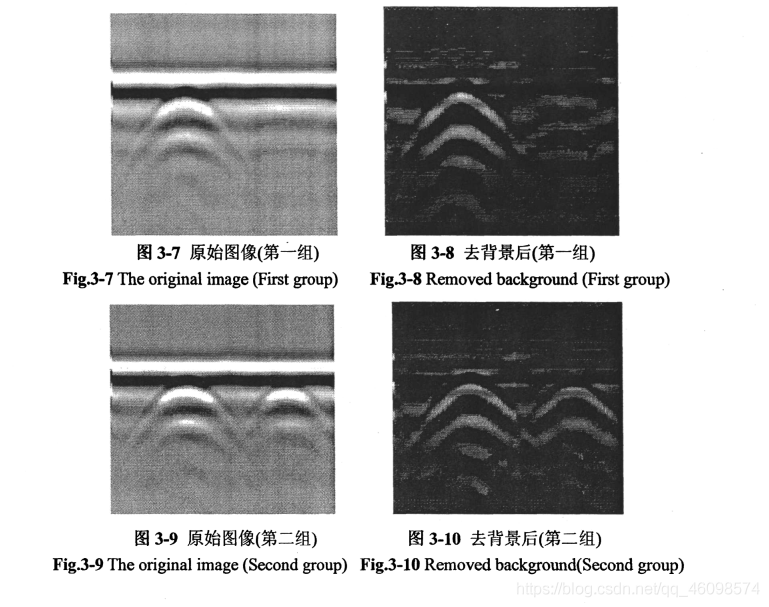
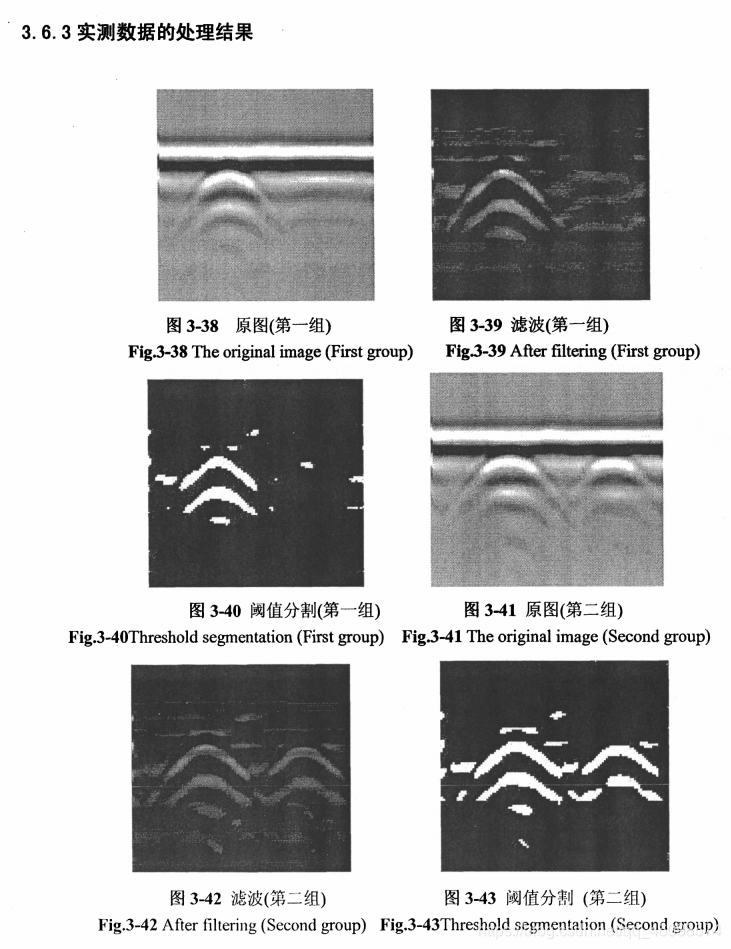
圖3.7至圖3.10為均值法處理資料的結果,從圖中可看出,均值法能去除絕大部分地表雜波,其原因分析如F:由于在B—scan中每個A—scan的地表回波等雜波時延大致相同,使得它們在矩陣中同行不同列上的值非常接近,而目標匣I波由于在不同的列上其時延不同,使它們在矩陣中所處行不同,每一行都減去該行均值后,就使得整個矩陣的元素值差別不足很大,同時保留了有無目標的相對資訊,從而去除了絕大部分地表雜波,
影像分割技術
影像分割就是將影像表示為物理上有意義的連通區域的集合,人們一般通過對影像的不同特征如邊緣、紋理、顏色、亮度等的分析達到影像分割的目的,影像分割通常是為了進一步對影像進行分析、識別、跟蹤、理解、壓縮編碼等,分割的準確性直接影響后續任務的有效性,因此具有卜分重要的意義,
影像分割方法可以大致分為四個方面:
1)利用影像灰度統計資訊的方法,典型的有一維直方圖閾值化方法和二維直方圖閾值化方法,
2)利用影像空問區域資訊和光譜資訊的影像分割方法,這類分割方法典型的包括區域分裂一合并、生長法、紋理分割和多光譜影像分割等,
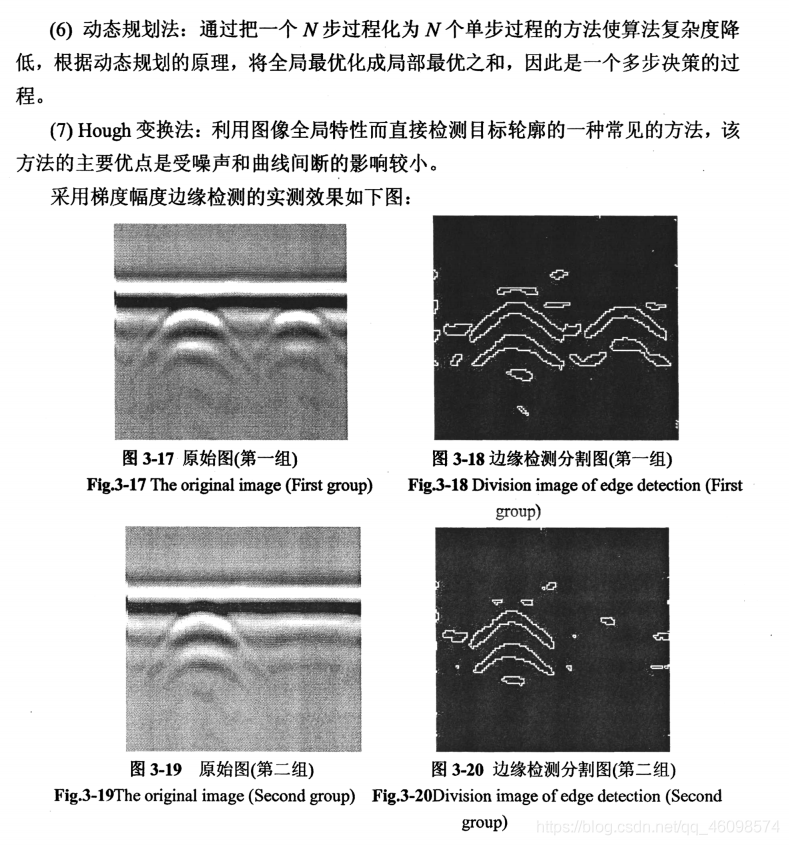
3)利用影像種灰度變化最強烈的區域資訊方法一邊緣檢測方法,這一類方法是Marr理論中主要倡導的方法,它在影像分割研究領域中占的比例最大,其典型的有
CaJllly演算法、Ca小Hildreth演算法和基于多尺度的邊緣檢測方法,
4)利用影像分類技術進行影像分割的象素分類方法,典型的有統計分類方法,模糊分類方法與神經網路分類方法等,
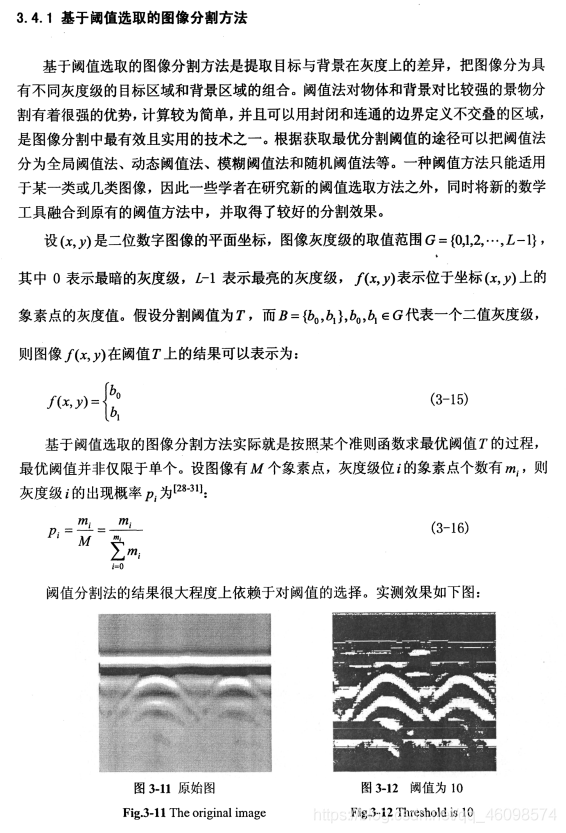
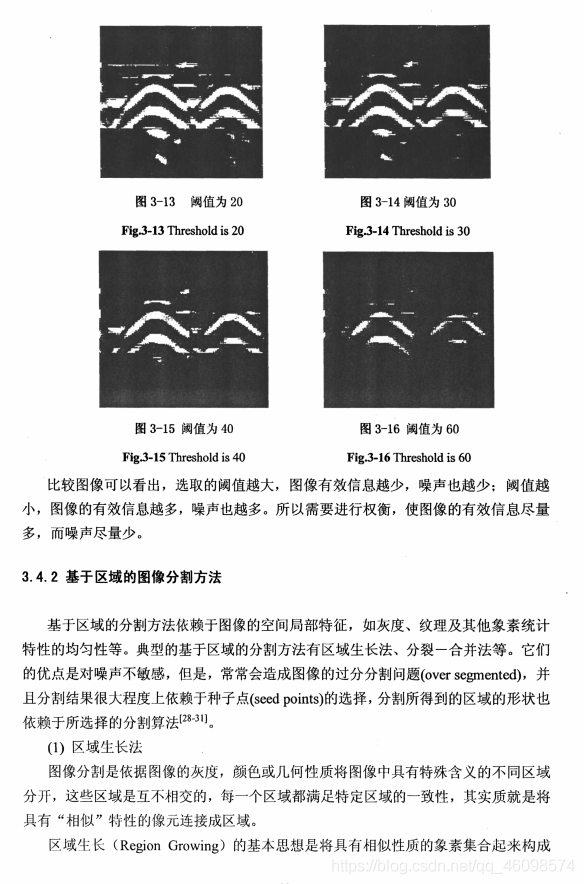
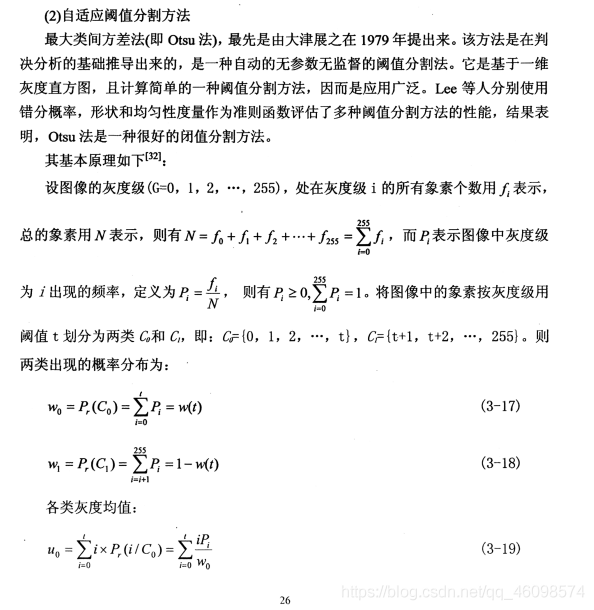
閾值分割技術的實作
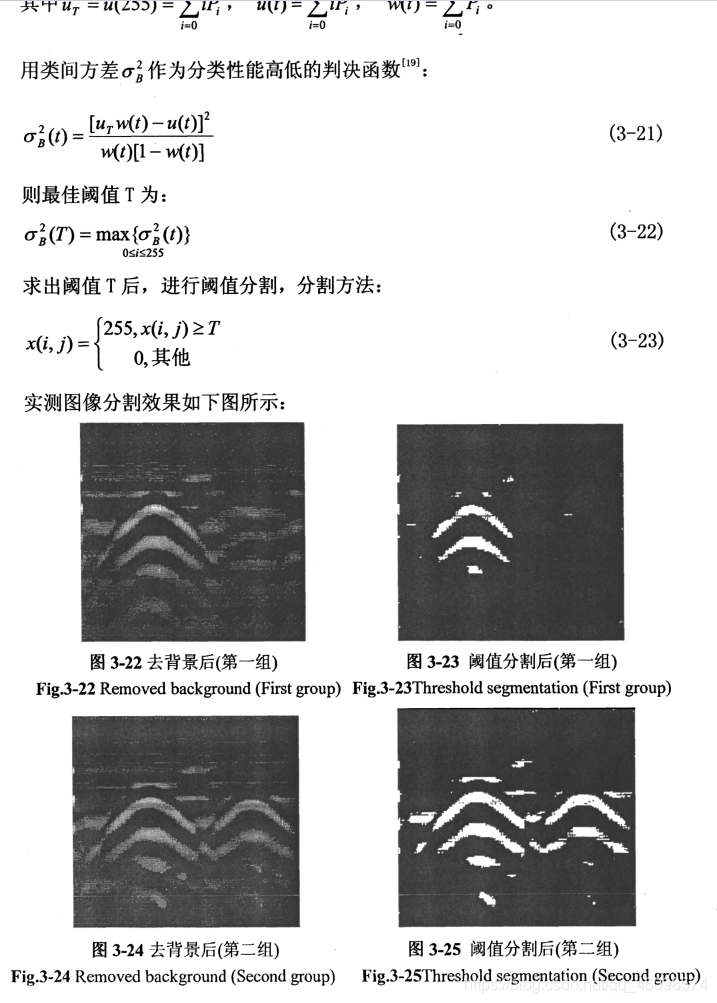
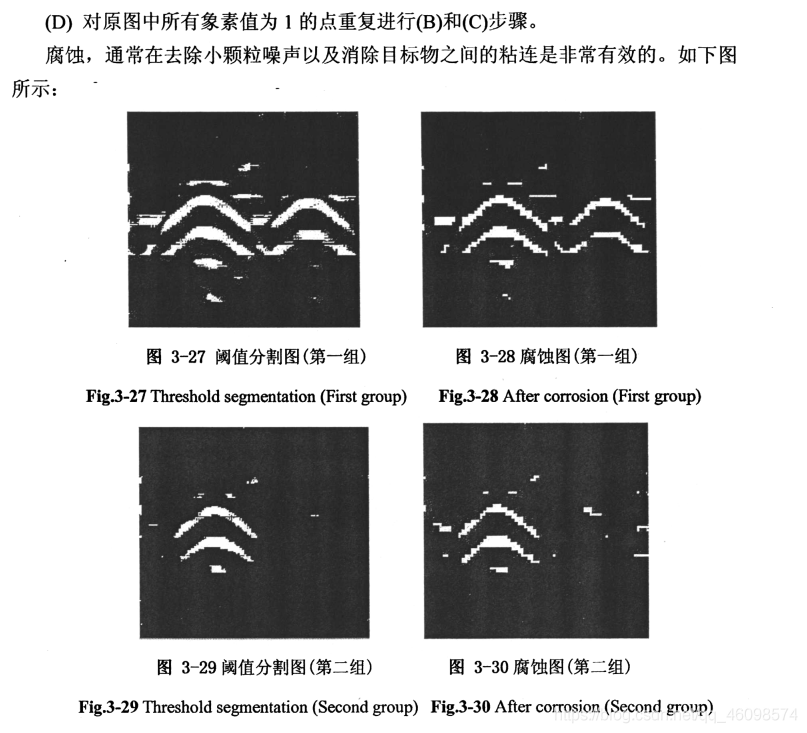
腐蝕與膨脹技術
探地雷達雜波抑制研究與實作
(1)地表回波在淺地層探地雷達影像中的特點
與各種普通影像一樣,探地雷達影像邊緣是由灰度級跳變構成的,在探測可疑物尤其是非金屬這類目標時,地表回波通常是最強的成分,因此探地雷達影像中的地表回波部分的灰度級跳變大,反映在梯度幅度影像中即這部分的梯度幅度值大,此外對于地表回波成分來說,它們在B.sc鋤資料所形成的矩陣中都分布在鄰近的一些行上,即地表回波分布范圍內的每行,在梯度幅度影像中的梯度幅度值都相對較大,
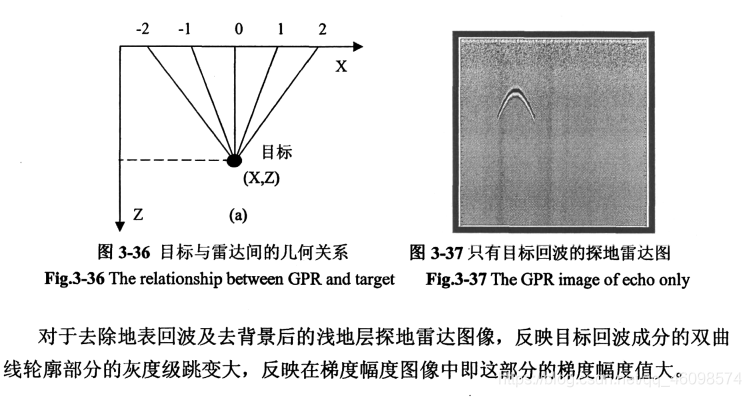
(2)目標回波在淺地層探地雷達影像中的特點
淺地層埋地目標在探地雷達B—scaIl資料所形成的影像中將呈雙曲線狀,這部分給一個幾何的解釋,雷達在地面沿同一個水平方向移動就得到一個二維的雷達影像,垂直軸和水平軸分別指示目標的水平位置和目標深度,圖3.36為目標和雷達之間的簡單幾何關系示意圖
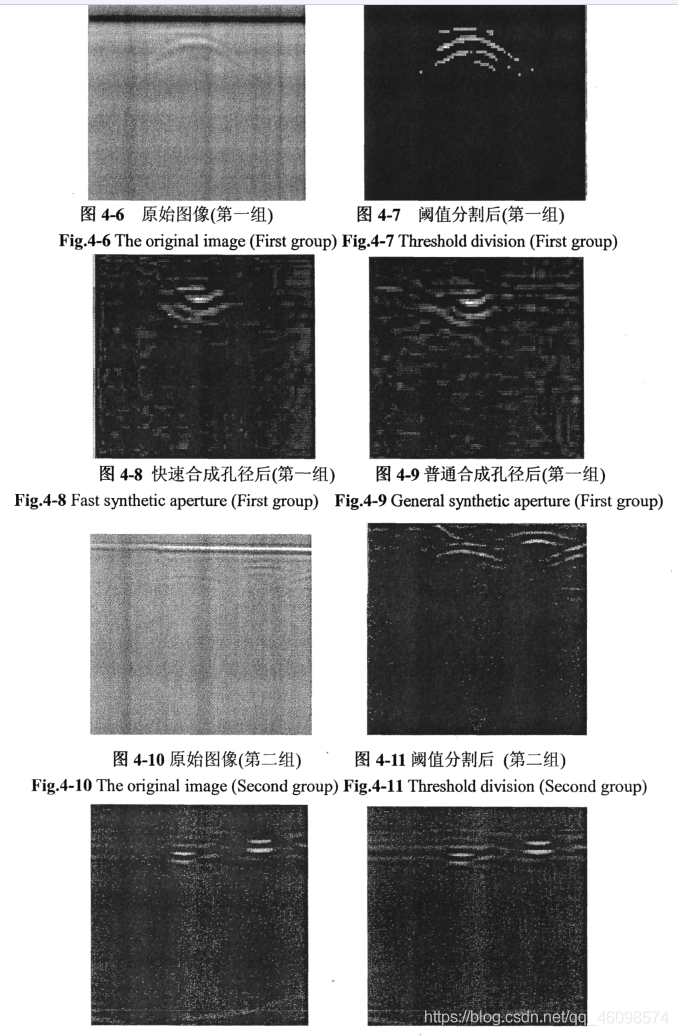
探地雷達合成孔徑成像
合成孔徑成像是探地雷達信號處理中一個非常重要的方面,其目的是要提高探地雷達影像的分辨力,在經合成孔徑成像處理后的淺地層探地雷達影像中,反映目標的雙曲線得到了聚焦,其更接近于目標的真實尺寸及目標的實際埋地位置,探地雷達合成孔徑成像是近年探地雷達研究領域的一個熱點之一,提到合成孔徑成像,肯定會想到各種普通雷達中所使用的合成孔徑成像方法(如機載sAR,星載SAR中的RaJlge.Doppler演算法,clli】p.scaling演算法等),但是這些方法對于淺地層探地雷達來說并不適用,普通雷達合成孔徑成像與淺地層探地雷達合成孔
徑成像之間有很多不同之處,下面簡要的介紹一些方面:
(1)淺地層探地雷達中的目標常常處于近場,而普通合成孔徑雷達中的目標常常處于遠場,
(2)普通合成孔徑雷達中的一些假設對淺地層探地雷達并不成立,如雷達位置的變化遠小于雷達到目標的距離這個假設對淺地層探地雷達就不成立,因為淺地層探地雷達與目標的距離一般只有幾厘米到幾十厘米,而雷達相鄰兩個位置間的距離通常都在厘米量級,
(3)機載雷達、星載雷達總是在一定的運動速度中采集資料,+合成孔徑成像時總會有雷達運動速度這個引數;而淺地層探地雷達合成孔徑成像時沒有雷達運動速度這個引數,但有兩個采樣點之間的間隔距離這個引數,
(4)普通合成孔徑雷達中由于電磁波通常只在空氣中傳播,所以電磁波波速通常取一恒定值(即光速):探地雷達由于電磁波要在地下介質中傳播,因此電磁波波速這個引數是隨介質的變化而變化的,
(5)在普通合成孔徑雷達中,距離徙動校正是成像的一個關鍵問題,通過徙動校正去除信號空間的藕合,可將二維處理分離成兩個一維處理的級聯,從而大大地減少成像處理的運算量;但這一步對淺地層探地雷達合成孔徑成像來說是不需的,探地雷達有其自身的特點,在探地雷達中常用的合成孔徑成像方法有
本章在研究基于微波全息成像的合成孔徑成像方法時,改進了一種快速實作方法,
即:基于雜波抑制和視窗劃分的基礎上提出的快速合成孔徑成像實作方法,
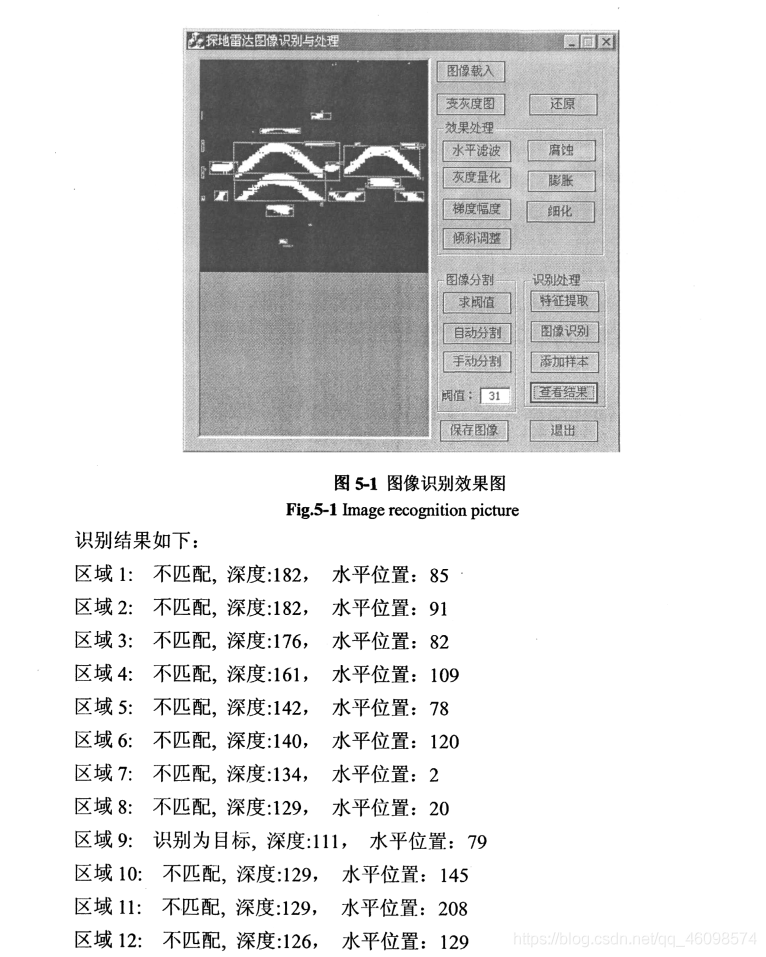
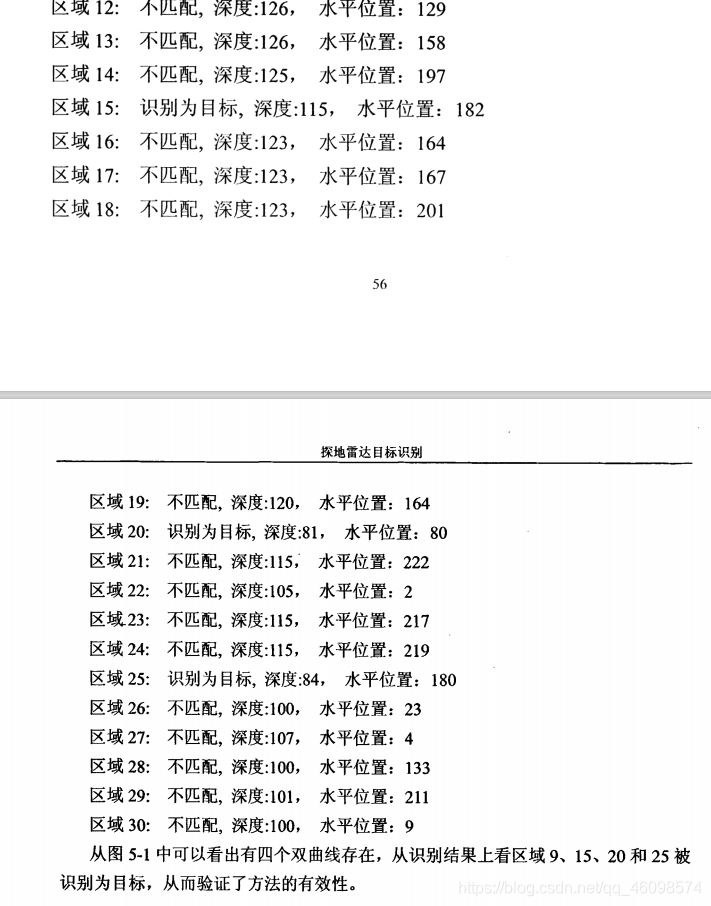
探地雷達目標識別
總結
本文主要研究了淺地層探地雷達中的雜波抑制,合成孔徑成像,自動目標識別與定位等方面,本文的主要作業可以歸納如下:
(1)概述了探地雷達的研究背景與意義,及國內外探地雷達的研究概況,
(2)介紹了電磁波在土壤中的傳播,探地雷達的基本原理與體制,以及探地雷達系統方面的知識,
(3)討論了各種探地雷達雜波抑制方法,數字影像的基本理論和影像傾斜矯正方法,重點介紹了均值法去背景這種最常用的雜波抑制方法,分析了影像的分割技術、濾波技術以及腐蝕與膨脹技術,從淺地層探地雷達影像的特點出發,提出了一種基于
影像處理技術抑制探地雷達雜波的方法,
(4)分析了淺地層探地雷達合成孔徑成像與普通雷達合成孔徑成像的不同,研究了探地雷達合成孔徑成像時的一個重要引數一波速的估計問題,使用了一種基于Hou幽變換的波速估計方法,在各種探地雷達合成孔徑成像方法中,改進了一種快速微波全息合成孔徑成像方法,
(5)介紹了針對B.scan的探地雷達目標識別與定位方法,在前述所提雜波抑制的基礎上運用并實作了了一種有效的特征提取和自動識別方法,并實作了一種基于視窗劃分的目標定位方法;
我個人任務,這篇2008年的文章,條理十分清晰,是當時絕對的大佬,對影像處理比較熟悉,能夠合適的運用于探測雷達與信號識別上,是當時十分前沿的科技;
如果是當今,我們可以基于此文做許多優化:
探地雷達是一個非常復雜的系統,對其的研究遠不及對探空雷達的研究成熟,尤其對淺地層探地雷達來說,由于目標所處環境復雜,雷達通常為超寬帶,使其對各方面的要求都非常高,因此除了作者本文研究的一些領域外,還有很多方面值得進一步研究,如以下列舉的幾個方面,
(1)尋找好的特征資料用于目標識別,本文所用特征資料只是部分滿足以下四個條件:時移不變性、時問尺度不變性、對多次反射不敏感、對噪聲不敏感,如果能找到完全滿足上述四個條件,同時又不增加資料量的特征資料,將會對提高識別率有很大的幫助.
(2)資料融合研究,在探測地雷所用的工具中,除了探地雷達外,還有金屬探測器,紅外傳感器等,將各種傳感器的資料融合在一起進行研究,將會有助于提高目標檢測及目標識別能力,
(3)對地下目標360度可視的三維成像及其分析與解釋,也是下一步值得研究的方向,
除此之外,文章中,在資料預處理中,其實可以將他文章中說到的膨脹腐蝕與濾波演算法以及閾值分割演算法加到其最終的演算法中,做預處理部分;
最后,當前可以使用深度學習目標檢測演算法做處理,當然,也依舊可以使用剛剛介紹的資料預處理方法,提高目標檢測的mAP;
本次論文分享結束,需要原論文的同學,請關注公眾號:DeepAI 視界,公眾號回復:探地雷達影像處理

轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/152559.html
標籤:其他
上一篇:MSP430單片機