同學們國慶假期快樂呀!瀟灑7天(帶娃7天),難得坐下來更新博客,
下載完整原始碼,點擊進入: https://github.com/ethan-li-coding/AD-Census
歡迎同學們在Github專案里討論!
接上篇十字交叉域代價聚合,本篇的內容是AD-Census的掃描線優化步驟,實際上,該步的思路和SGM的代碼聚合是基本一樣的,只不過在P1/P2引數設定上做了一些修改,確實,SGM的P1、P2設定策略過于簡單,優點是魯棒性高,對大部分資料都能得到一個還不錯的視差結果,但明顯的弊端就是很難找到一組特別好的引陣列合,使特定應用場景的資料達到比較完美的狀態,P1/P2的設定對整體視差效果尤其是邊緣處的視差很關鍵,所以AD-Census的改進方向是有實際意義的,
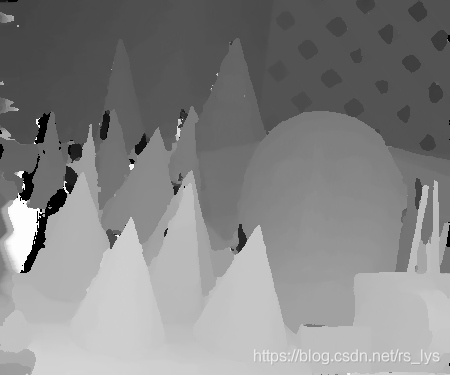
我們不妨直接先看下AD-Census掃描線優化的成果:

|

|

|
|
顯然,掃描線優化后的視差圖比代價聚合后的視差圖更加完整,錯誤值更少,當然這并不能說明AD-Census的引數改進就是有效的,只能說明掃描線優化步驟是有效的,
我們來看編碼介紹吧!
文章目錄
- 演算法
- 代碼實作
- 類設計
- 成員函式
- 成員變數
- 類實作
- 實驗
演算法
同樣的,演算法原理請看博文:
經典AD-Census: (3)掃描線優化(Scanline Optimization)
這里我就不再展開講優化的原理了,和SGM(SemiGlobalMatching)的代價聚合策略確實是一模一樣,看博主往期博客就行了,AD-Census采用4方向的掃描線優化,即上下左右4個方向,
AD-Census所做的修改在于 P 1 P_1 P1?和 P 2 P_2 P2?值的設定方式,在SGM中, P 1 P_1 P1?、 P 2 ′ P_2' P2′?是預設的固定值,實際使用的 P 2 P_2 P2?是根據左視圖相鄰兩個像素的亮度差值而實時調整的,調整公式為 P 2 = P 2 ′ / ( I p ? I q ) P_2=P_2'/(I_p-I_q) P2?=P2′?/(Ip??Iq?),
而在Ad-Census中, P 1 P_1 P1?、 P 2 P_2 P2?不只是和左視圖的相鄰像素顏色差 D 1 = D c ( p , p ? r ) D_1=D_c(p,p-r) D1?=Dc?(p,p?r)有關,而且和右視圖對應同名點的相鄰像素顏色差 D 2 = D c ( p d , p d ? r ) D_2=D_c(pd,pd-r) D2?=Dc?(pd,pd?r)有關,
(注1:AD-Census演算法默認輸入彩色圖,所以是算顏色差,如果是輸入灰度圖,則是亮度差,顏色差的定義是
D
c
(
p
l
,
p
)
=
m
a
x
i
=
R
,
G
,
B
∣
I
i
(
p
l
)
?
I
i
(
p
)
∣
D_c(p_l,p)=max_{i=R,G,B}|I_i(p_l)-I_i(p)|
Dc?(pl?,p)=maxi=R,G,B?∣Ii?(pl?)?Ii?(p)∣,即三個顏色分量差值的最大值)
(注2:
p
d
pd
pd 實際就是像素
p
p
p 通過視差
d
d
d 找到的右視圖上的同名點
q
=
p
?
d
q=p-d
q=p?d)
(注3:
p
?
r
p-r
p?r代表聚合方向上的上一個像素,比如從左到右聚合,則
p
?
r
p-r
p?r就是
p
?
1
p-1
p?1;從右到左聚合,則
p
?
r
p-r
p?r就是
p
+
1
p+1
p+1)
具體設定規則如下:
- P 1 = Π 1 , P 2 = Π 2 , i f D 1 < τ S O , D 2 < τ S O P_1=Π_1,P_2=Π_2, if D_1<τ_{SO},D_2<τ_{SO} P1?=Π1?,P2?=Π2?,ifD1?<τSO?,D2?<τSO?
- P 1 = Π 1 / 4 , P 2 = Π 2 / 4 , i f D 1 < τ S O , D 2 > τ S O P_1=Π_1/4,P_2=Π_2/4, if D_1<τ_{SO},D_2>τ_{SO} P1?=Π1?/4,P2?=Π2?/4,ifD1?<τSO?,D2?>τSO?
- P 1 = Π 1 / 4 , P 2 = Π 2 / 4 , i f D 1 > τ S O , D 2 < τ S O P_1=Π_1/4,P_2=Π_2/4, if D_1>τ_{SO},D_2<τ_{SO} P1?=Π1?/4,P2?=Π2?/4,ifD1?>τSO?,D2?<τSO?
- P 1 = Π 1 / 10 , P 2 = Π 2 / 10 , i f D 1 > τ S O , D 2 > τ S O P_1=Π_1/10,P_2=Π_2/10, if D_1>τ_{SO},D_2>τ_{SO} P1?=Π1?/10,P2?=Π2?/10,ifD1?>τSO?,D2?>τSO?
Π 1 , Π 2 Π_1,Π_2 Π1?,Π2?是設定的固定閾值, τ S O τ_{SO} τSO?是設定的顏色差閾值,
代碼實作
類設計
成員函式
同樣,我們用一個掃描線優化器類ScanlineOptimizer來實作該功能,放在檔案scanline_optimizer.h/scanline_optimizer.cpp中,
/**
* \brief 掃描線優化器
*/
class ScanlineOptimizer {
public:
ScanlineOptimizer();
~ScanlineOptimizer();
}
在公有成員函式的設計上,第一類介面是必不可少的 設定資料SetData 以及 設定引數SetParam ,完成演算法的輸入,第二類就是優化功能介面 Optimize ,
而具體的優化子步驟,我們放在私有成員函式串列里,包括水平方向聚合 CostAggregateLeftRight 以及豎直方向聚合 CostAggregateUpDown,
同時,演算法需要的一個小功能顏色距離計算函式 ColorDist,也放在私有函式中,
所有成員函式的宣告代碼如下:
public:
ScanlineOptimizer();
~ScanlineOptimizer();
/**
* \brief 設定資料
* \param img_left // 左影像資料,三通道
* \param img_right // 右影像資料,三通道
* \param cost_init // 初始代價陣列
* \param cost_aggr // 聚合代價陣列
*/
void SetData(const uint8* img_left, const uint8* img_right, float32* cost_init, float32* cost_aggr);
/**
* \brief
* \param width // 影像寬
* \param height // 影像高
* \param min_disparity // 最小視差
* \param max_disparity // 最大視差
* \param p1 // p1
* \param p2 // p2
* \param tso // tso
*/
void SetParam(const sint32& width,const sint32& height, const sint32& min_disparity, const sint32& max_disparity, const float32& p1, const float32& p2, const sint32& tso);
/**
* \brief 優化 */
void Optimize();
private:
/**
* \brief 左右路徑聚合 → ←
* \param cost_so_src 輸入,SO前代價資料
* \param cost_so_dst 輸出,SO后代價資料
* \param is_forward 輸入,是否為正方向(正方向為從左到右,反方向為從右到左)
*/
void CostAggregateLeftRight(const float32* cost_so_src, float32* cost_so_dst, bool is_forward = true);
/**
* \brief 上下路徑聚合 ↓ ↑
* \param cost_so_src 輸入,SO前代價資料
* \param cost_so_dst 輸出,SO后代價資料
* \param is_forward 輸入,是否為正方向(正方向為從上到下,反方向為從下到上)
*/
void CostAggregateUpDown(const float32* cost_so_src, float32* cost_so_dst, bool is_forward = true);
/** \brief 計算顏色距離 */
inline sint32 ColorDist(const ADColor& c1, const ADColor& c2) {
return std::max(abs(c1.r - c2.r), std::max(abs(c1.g - c2.g), abs(c1.b - c2.b)));
}
為每個函式都寫了清晰的注釋,便于快速理解,此外計算顏色距離的函式為行內函式,宣告的同時也定義實作了它,
成員變數
成員變數全部都被設計為私有,僅在演算法內部使用,他們是影像尺寸、影像資料、代價資料(初始/聚合)、演算法引數等,
private:
/** \brief 影像尺寸 */
sint32 width_;
sint32 height_;
/** \brief 影像資料 */
const uint8* img_left_;
const uint8* img_right_;
/** \brief 初始代價陣列 */
float32* cost_init_;
/** \brief 聚合代價陣列 */
float32* cost_aggr_;
/** \brief 最小視差值 */
sint32 min_disparity_;
/** \brief 最大視差值 */
sint32 max_disparity_;
/** \brief 初始的p1值 */
float32 so_p1_;
/** \brief 初始的p2值 */
float32 so_p2_;
/** \brief tso閾值 */
sint32 so_tso_;
類實作
由于SetData和SetParam比較簡單,代碼量也很少,所以就不做介紹了,大家看代碼就懂了,這里就介紹下掃描線優化的兩個子步驟 CostAggregateLeftRight和 CostAggregateUpDown,
實際上,我是直接把SGM的代價聚合代碼搬過來,修改 P 1 P_1 P1?和 P 2 P_2 P2?值的計算方式就行了,如下:
void ScanlineOptimizer::CostAggregateLeftRight(const float32* cost_so_src, float32* cost_so_dst, bool is_forward)
{
const auto width = width_;
const auto height = height_;
const auto min_disparity = min_disparity_;
const auto max_disparity = max_disparity_;
const auto p1 = so_p1_;
const auto p2 = so_p2_;
const auto tso = so_tso_;
assert(width > 0 && height > 0 && max_disparity > min_disparity);
// 視差范圍
const sint32 disp_range = max_disparity - min_disparity;
// 正向(左->右) :is_forward = true ; direction = 1
// 反向(右->左) :is_forward = false; direction = -1;
const sint32 direction = is_forward ? 1 : -1;
// 聚合
for (sint32 y = 0u; y < height; y++) {
// 路徑頭為每一行的首(尾,dir=-1)列像素
auto cost_init_row = (is_forward) ? (cost_so_src + y * width * disp_range) : (cost_so_src + y * width * disp_range + (width - 1) * disp_range);
auto cost_aggr_row = (is_forward) ? (cost_so_dst + y * width * disp_range) : (cost_so_dst + y * width * disp_range + (width - 1) * disp_range);
auto img_row = (is_forward) ? (img_left_ + y * width * 3) : (img_left_ + y * width * 3 + 3 * (width - 1));
const auto img_row_r = img_right_ + y * width * 3;
sint32 x = (is_forward) ? 0 : width - 1;
// 路徑上當前顏色值和上一個顏色值
ADColor color(img_row[0], img_row[1], img_row[2]);
ADColor color_last = color;
// 路徑上上個像素的代價陣列,多兩個元素是為了避免邊界溢位(首尾各多一個)
std::vector<float32> cost_last_path(disp_range + 2, Large_Float);
// 初始化:第一個像素的聚合代價值等于初始代價值
memcpy(cost_aggr_row, cost_init_row, disp_range * sizeof(float32));
memcpy(&cost_last_path[1], cost_aggr_row, disp_range * sizeof(float32));
cost_init_row += direction * disp_range;
cost_aggr_row += direction * disp_range;
img_row += direction * 3;
x += direction;
// 路徑上上個像素的最小代價值
float32 mincost_last_path = Large_Float;
for (auto cost : cost_last_path) {
mincost_last_path = std::min(mincost_last_path, cost);
}
// 自方向上第2個像素開始按順序聚合
for (sint32 j = 0; j < width - 1; j++) {
color = ADColor(img_row[0], img_row[1], img_row[2]);
const uint8 d1 = ColorDist(color, color_last);
uint8 d2 = d1;
float32 min_cost = Large_Float;
for (sint32 d = 0; d < disp_range; d++) {
const sint32 xr = x - d;
if (xr > 0 && xr < width - 1) {
const ADColor color_r = ADColor(img_row_r[3 * xr], img_row_r[3 * xr + 1], img_row_r[3 * xr + 2]);
const ADColor color_last_r = ADColor(img_row_r[3 * (xr - direction)],
img_row_r[3 * (xr - direction) + 1],
img_row_r[3 * (xr - direction) + 2]);
d2 = ColorDist(color_r, color_last_r);
}
// 計算P1和P2
float32 P1(0.0f), P2(0.0f);
if (d1 < tso && d2 < tso) {
P1 = p1; P2 = p2;
}
else if (d1 < tso && d2 >= tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 < tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 >= tso) {
P1 = p1 / 10; P2 = p2 / 10;
}
// Lr(p,d) = C(p,d) + min( Lr(p-r,d), Lr(p-r,d-1) + P1, Lr(p-r,d+1) + P1, min(Lr(p-r))+P2 ) - min(Lr(p-r))
const float32 cost = cost_init_row[d];
const float32 l1 = cost_last_path[d + 1];
const float32 l2 = cost_last_path[d] + P1;
const float32 l3 = cost_last_path[d + 2] + P1;
const float32 l4 = mincost_last_path + P2;
float32 cost_s = cost + static_cast<float32>(std::min(std::min(l1, l2), std::min(l3, l4)));
cost_s /= 2;
cost_aggr_row[d] = cost_s;
min_cost = std::min(min_cost, cost_s);
}
// 重置上個像素的最小代價值和代價陣列
mincost_last_path = min_cost;
memcpy(&cost_last_path[1], cost_aggr_row, disp_range * sizeof(float32));
// 下一個像素
cost_init_row += direction * disp_range;
cost_aggr_row += direction * disp_range;
img_row += direction * 3;
x += direction;
// 像素值重新賦值
color_last = color;
}
}
}
如果不了解聚合代碼,可以看我此前博客:
編碼實作經典SGM:(3)代價聚合
本篇我們重點看下P1和P2的計算方式:
我們首先在輪到每個像素時,計算了左視圖上它與上一個像素的顏色距離(顏色差) d 1 d_1 d1?:
const uint8 d1 = ColorDist(color, color_last);
然后在遍歷像素每個視差時,計算右視圖對應像素與其上一個像素的顏色距離 d 2 d_2 d2?,
const sint32 xr = x - d;
if (xr > 0 && xr < width - 1) {
const ADColor color_r = ADColor(img_row_r[3 * xr], img_row_r[3 * xr + 1], img_row_r[3 * xr + 2]);
const ADColor color_last_r = ADColor(img_row_r[3 * (xr - direction)],
img_row_r[3 * (xr - direction) + 1],
img_row_r[3 * (xr - direction) + 2]);
d2 = ColorDist(color_r, color_last_r);
}
接下來根據 d 1 d_1 d1?和 d 2 d_2 d2?與閾值的比較情況,判定為四種情況中的某一種,計算P1和P2的值,
// 計算P1和P2
float32 P1(0.0f), P2(0.0f);
if (d1 < tso && d2 < tso) {
P1 = p1; P2 = p2;
}
else if (d1 < tso && d2 >= tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 < tso) {
P1 = p1 / 4; P2 = p2 / 4;
}
else if (d1 >= tso && d2 >= tso) {
P1 = p1 / 10; P2 = p2 / 10;
}
其中,小寫的p1、p2,以及tso都是輸入的演算法引數,
const auto p1 = so_p1_;
const auto p2 = so_p2_;
const auto tso = so_tso_;
豎直方向的代碼我就不貼了,除了方向不同,和水平方向并無其他區別,照葫蘆畫瓢,
在公有的優化介面 Optimize 內,只需要依次呼叫四個方向的優化函式就行了,
void ScanlineOptimizer::Optimize()
{
if (width_ <= 0 || height_ <= 0 ||
img_left_ == nullptr || img_right_ == nullptr ||
cost_init_ == nullptr || cost_aggr_ == nullptr) {
return;
}
// 4方向掃描線優化
// 模塊的首次輸入是上一步代價聚合后的資料,也就是cost_aggr_
// 我們把四個方向的優化按次序進行,并利用cost_init_及cost_aggr_間次保存臨時資料,這樣不用開辟額外的記憶體來存盤中間結果
// 模塊的最終輸出也是cost_aggr_
// left to right
CostAggregateLeftRight(cost_aggr_, cost_init_, true);
// right to left
CostAggregateLeftRight(cost_init_, cost_aggr_, false);
// up to down
CostAggregateUpDown(cost_aggr_, cost_init_, true);
// down to up
CostAggregateUpDown(cost_init_, cost_aggr_, false);
}
這里用了一個小技巧,即交替使用cost_aggr和cost_init,不用額外開辟四個方向的代價陣列,只用兩個代價資料即完成整個優化操作,
實驗
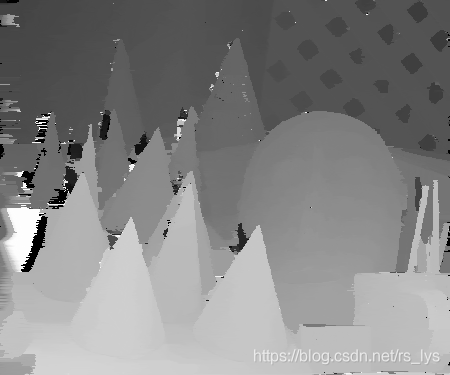
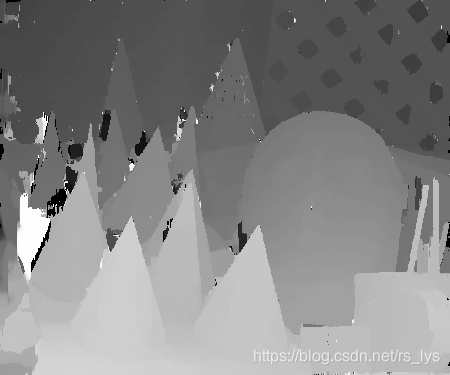
我們做了三組實驗,一組是只做左右水平方向的掃描線優化,一組是只做上下豎直方向的掃描線優化,剩下一組是做四個方向的優化,我們來看看效果,
|
|
|
|
|
看上去,只做水平或者豎直優化,視差圖已有明顯的改進,但單方向的優化會存在方向條紋效應,而4方向的優化結果則能夠消除這一現象,達到更佳的狀態,
最后,我們再貼一下文章開頭的實驗圖:
|
|
|
|
|
好了,本篇到此結束,下一篇將為大家帶來的是后處理部分,感謝觀看!
下載AD-Census完整原始碼,點擊進入: https://github.com/ethan-li-coding/AD-Census
歡迎同學們在Github專案里討論,如果覺得博主代碼質量不錯,右上角給顆星!感謝!
博主簡介:
Ethan Li 李迎松(知乎:李迎松)
武漢大學 攝影測量與遙感專業博士
主方向立體匹配、三維重建
2019年獲測繪科技進步一等獎(省部級)
愛三維,愛分享,愛開源
GitHub: https://github.com/ethan-li-coding (歡迎follow和star)
個人微信:
歡迎交流!
關注博主不迷路,感謝!
博客主頁:https://ethanli.blog.csdn.net

 CSDN認證博客專家
立體視覺
工學博士
博客專家
CSDN認證博客專家
立體視覺
工學博士
博客專家
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/167999.html
標籤:其他