LIS3DH是一個三軸加速度傳感器,可用于檢測X、Y、Z軸上的加速度,以及設定閾值,在加速度超出閾值時觸發中斷,
支持SPI和IIC讀寫,
下面主要是IIC方式讀寫:
一、暫存器讀寫流程
首先硬體連接會決定該模塊的IIC地址
如果SAO腳接地,IIC地址為0X30(不包含最低位).
如果接V3.3,則IIC地址為0X32(不包含最低位).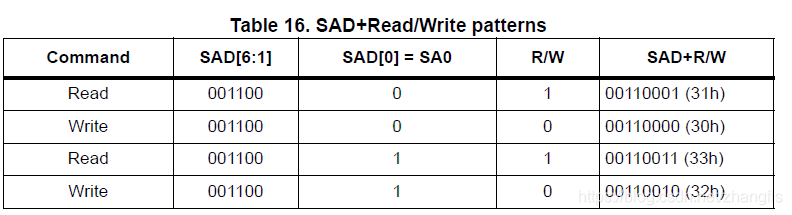
這個器件地址很重要,因為讀寫暫存器都是要先寫一下對應的器件地址,然后再寫命令的
注意先發送的器件地址只是前7位,最后一位決定的是讀寫位,0是寫暫存器,1為讀暫存器,所以寫暫存器時是寫“LIS_ADDR|0x00”,讀的時候則是“LIS_ADDR|0x01”
a、主機向從機寫一個位元組,下表是通過IIC向LIS3DH暫存器寫一個位元組的流程,簡單來說就是先寫1個位元組的寫命令+IIC地址,再寫一個位元組的你要寫的暫存器地址,最后寫一個位元組你要寫入暫存器的內容
示例:
//IIC寫一個位元組
//reg:暫存器地址
//data:資料
//回傳值:0,正常
//其他,錯誤代碼
uint8_t LIS_Write_Byte(uint8_t reg,uint8_t data)
{
IIC_Start();
IIC_Send_Byte(LIS_ADDR|0x00);//發送器件地址+寫命令
if(IIC_Wait_Ack()) //等待應答
{
IIC_Stop();
return 1;
}
IIC_Send_Byte(reg|0x00); //寫暫存器地址 D7位為低用于單位元組傳輸
IIC_Wait_Ack(); //等待應答
IIC_Send_Byte(data); //發送資料
if(IIC_Wait_Ack()) //等待ACK
{
IIC_Stop();
return 1;
}
IIC_Stop();
AP_interface->ol_Sleep(5000);
return 0;
}
b、LIS3DH讀暫存器一個位元組
流程:先寫1個位元組的寫命令+IIC地址,再寫你要讀的暫存器,然后寫1個位元組的讀命令+IIC地址,最后讀一個位元組的資料

示例:
//IIC讀一個位元組
//reg:暫存器地址
//回傳值:讀到的資料
uint8_t LIS_Read_Byte(uint8_t reg)
{
uint8_t res=0x00;
IIC_Start();
IIC_Send_Byte(LIS_ADDR|0x00);//發送器件地址+寫命令
if(IIC_Wait_Ack()) //等待ACK
{
IIC_Stop();
return 1;
}
IIC_Send_Byte(reg); //寫暫存器地址
IIC_Wait_Ack(); //等待應答
IIC_Start();
IIC_Send_Byte(LIS_ADDR|0x01); //發送器件地址+讀命令
IIC_Wait_Ack(); //等待應答
res = IIC_Read_Byte(0); //讀取資料,發送nACK
IIC_Stop(); //產生一個停止條件
return res;
}c、IIC連續寫暫存器:

示例:
//IIC連續寫
//addr:器件地址
//reg:暫存器地址
//len:寫入長度
//buf:資料區
//回傳值:0,正常
// 其他,錯誤代碼
uint8_t LIS_Write_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf)
{
uint8_t i;
IIC_Start();
IIC_Send_Byte(LIS_ADDR|0x00);//發送器件地址+寫命令
if(IIC_Wait_Ack()) //等待應答
{
IIC_Stop();
return 1;
}
IIC_Send_Byte(reg|0x80); //寫暫存器地址 D7位為高用于多位元組傳輸
IIC_Wait_Ack(); //等待應答
for(i=0;i<len;i++)
{
IIC_Send_Byte(buf[i]); //發送資料
if(IIC_Wait_Ack()) //等待ACK
{
IIC_Stop();
return 1;
}
}
IIC_Stop();
return 0;
}d、IIC方式連續讀暫存器,注意MAK和NMAK,

示例:
//IIC連續讀
//addr:器件地址
//reg:要讀取的暫存器地址
//len:要讀取的長度
//buf:讀取到的資料存盤區
//回傳值:0,正常
// 其他,錯誤代碼
uint8_t LIS_Read_Len(uint8_t addr,uint8_t reg,uint8_t len,uint8_t *buf)
{
IIC_Start();
IIC_Send_Byte(LIS_ADDR|0x00);//發送器件地址+寫命令
if(IIC_Wait_Ack()) //等待應答
{
IIC_Stop();
return 1;
}
IIC_Send_Byte(reg|0x80); //寫暫存器地址 D7位為高用于多位元組傳輸
IIC_Wait_Ack(); //等待應答
IIC_Start();
IIC_Send_Byte(LIS_ADDR|0x01);//發送器件地址+讀命令
IIC_Wait_Ack(); //等待應答
while(len)
{
if(len==1)*buf=IIC_Read_Byte(0);//讀資料,發送nACK
else *buf=IIC_Read_Byte(1); //讀資料,發送ACK
len--;
buf++;
}
IIC_Stop(); //產生一個停止條件
return 0;
}二、設定閾值震動觸發中斷應用
首先,通過讀取一個叫WHO_AM_I的暫存器,可以用來確定芯片可用,因為這個暫存器讀取的值是恒定的0x33,
設定閾值觸發中斷示例:
該實體設定了中斷鎖存,即直到重新讀取INT1_SRC暫存器前,中斷都不會被清除,引腳會被一直強拉到重新讀取INT1_SRC為止,
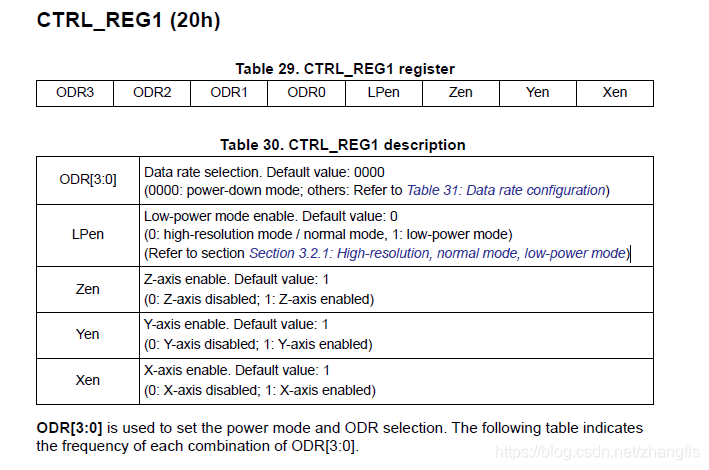
LIS_Write_Byte(CTRL_REG1,0x3F); //設定低功耗模式 xyz軸使能 采樣頻率25HZ
LIS_Write_Byte(CTRL_REG2,0x09); //高通濾波正常模式,資料從內部濾波器到輸出暫存器 高通濾波器使能到中斷1
LIS_Write_Byte(CTRL_REG3,0x40); //使能AOI中斷1
LIS_Write_Byte(CTRL_REG4,0x80); //解析度為+-2g 則單位為 4000/(2^8)=16mg 僅在LSB和MSB被讀時才更新資料
LIS_Write_Byte(CTRL_REG5,0x08); //暫存器鎖存中斷,只有讀INT1_SRC可以恢復
LIS_Write_Byte(INT1_THS,0x10); //設定閾值 16*16=256 mg
LIS_Write_Byte(INT1_DURATION,0x00); //中斷持續時間設定,此處設為0,因為不讀INT1_SRC中斷就一直鎖存
LIS_Read_Byte(REFERENCE); //讀虛暫存器,強制將高通濾波器值加載到當前加速度值,開始比較
//INT1_CFG使能中斷 中斷模式為 “OR”組合 只使能xyz軸高事件
//LIS_Write_Byte(INT1_CFG,0x2A);
//INT1_CFG使能中斷 中斷模式6-direction position 使能xyz軸高低事件
LIS_Write_Byte(INT1_CFG,0xFF);
LIS_Read_Byte(INT1_SRC);//清除中斷位另外,還可以設定中斷觸發指定時間,隨后引腳會還原,主要通過設定INT1_DURATION (33h)暫存器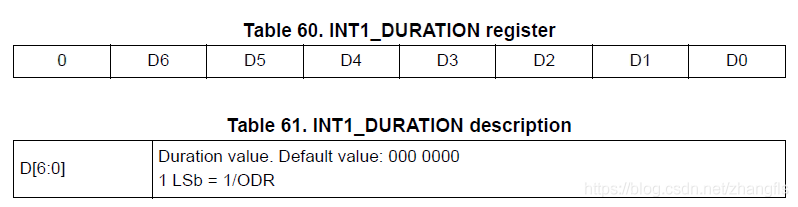
這個ODR可以通過GTRL_REG1設定,
最后中斷持續時間就是INT1_DURATION/ODR
三、FIFO模式讀取X、Y、Z軸方向加速度值
出于高速讀寫的需求,可能需要使用FIFO方式來進行加速度的讀取
LIS3DH的FIFO模式有4種:
1、Bypass mode
中間模式,只有切換模式的時候用得到
2、FIFO mode
資料填充滿緩沖區后,停止繼續填充
3、Stream mode
資料持續輸出,填充滿緩沖區后會覆寫舊的資料,資料依次向前推一位元組
4、Stream-to-FIFO mode
FIFObuffer開始處于stream模式,等到中斷腳選擇觸發時,切換到FIFO模式,FIFO_CTRL_REG (2Eh)的TR位可以決定是INT1腳還是INT2腳來進行控制,芯片手冊上貌似寫這是一種用于除錯的模式,實際應用前兩種應該就夠了
示例:讀取XYZ軸方向的加速度,用Stream mode,
watermark是指配置FSS [4:0]來檢查讀取的時候資料總量是否超出指定的范圍,因為FIFO的緩沖區最多為32級,比如可以設定為20,則讀取的時候,如果當時資料超出20個,則FIFO_SRC_REG (2Fh) (WTM)位會被置1,否則為0,
同時FIFO_SRC_REG (2Fh) 的 OVRN_FIFO會被置1,如果32級緩沖區全部滿了,
//測驗FIFO
IIC_WriteByte(LIS3DH_CTRL_REG1,0x80|0x0F); //0010 0111 低功耗模式
IIC_WriteByte(LIS3DH_CTRL_REG2,0x00); //高通濾波關閉
IIC_WriteByte(LIS3DH_CTRL_REG3,0x06); //使能FIFO中斷 0000 0110
IIC_WriteByte(LIS3DH_CTRL_REG4,0x00); //解析度+-16g 0011 0000
IIC_WriteByte(LIS3DH_CTRL_REG5,0x48); //FIFO使能 0100 1000
IIC_WriteByte(LIS3DH_FIFO_CTRL,0x80|0x1D); //0100 1111 配置FIFO模式和水印
IIC_ReadByte(LIS3DH_INT1_SRC); //清除中斷位
collect_LIS_Data();
void collect_LIS_Data(void)
{
uint16_t LIS_temp_data[3] = {0,0,0};
uint8_t data_len,i;
FIFO_data_len = IIC_ReadByte(LIS3DH_FIFO_SRC);
FIFO_data_len &= 0x1F;
for(i=0;i<FIFO_data_len;i++)
{
LIS3DH_ReadData(LIS_temp_data); //讀取3個方向的資料
}
}資料會不斷重繪,所以要定時讀取,讀取間隔可以通過ODR來控制調整,
如果要使用stm32的硬體IIC實作LIS3DH的各種功能配置,可以參考這篇:
https://blog.csdn.net/zhangfls/article/details/109078500
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/172161.html
標籤:其他