按照博主博客:
https://blog.csdn.net/neptune4751/article/details/108936754
安裝SLAM的運行環境包括Ceres,ROS Kinetic和Ubuntu 16.04等,
需要創建catkin_ws作業空間,可在任意目錄下創建檔案夾catkin_ws:
mkdir -p home/zoe/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash在運行EuRoC MAV Dataset時,以Monocular camera+IMU為例:
需要打開多個終端:每個終端運行的指令分別為:
source ~/catkin_ws/devel/setup.bash
roslaunch vins vins_rviz.launch
source ~/catkin_ws/devel/setup.bash
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_mono_imu_config.yaml source ~/catkin_ws/devel/setup.bash
rosbag play dataset/MH_01_easy.bag另外可選項:(如果不運行的話,rviz中左下角的loop_match_image將為空)
source ~/catkin_ws/devel/setup.bash
rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_mono_imu_config.yaml 其中dataset檔案夾為MH_01_easy.bag所在目錄,(另外:rosdistro目錄存盤的為ros安裝包需要下載的檔案,備注一下以免以后忘記)
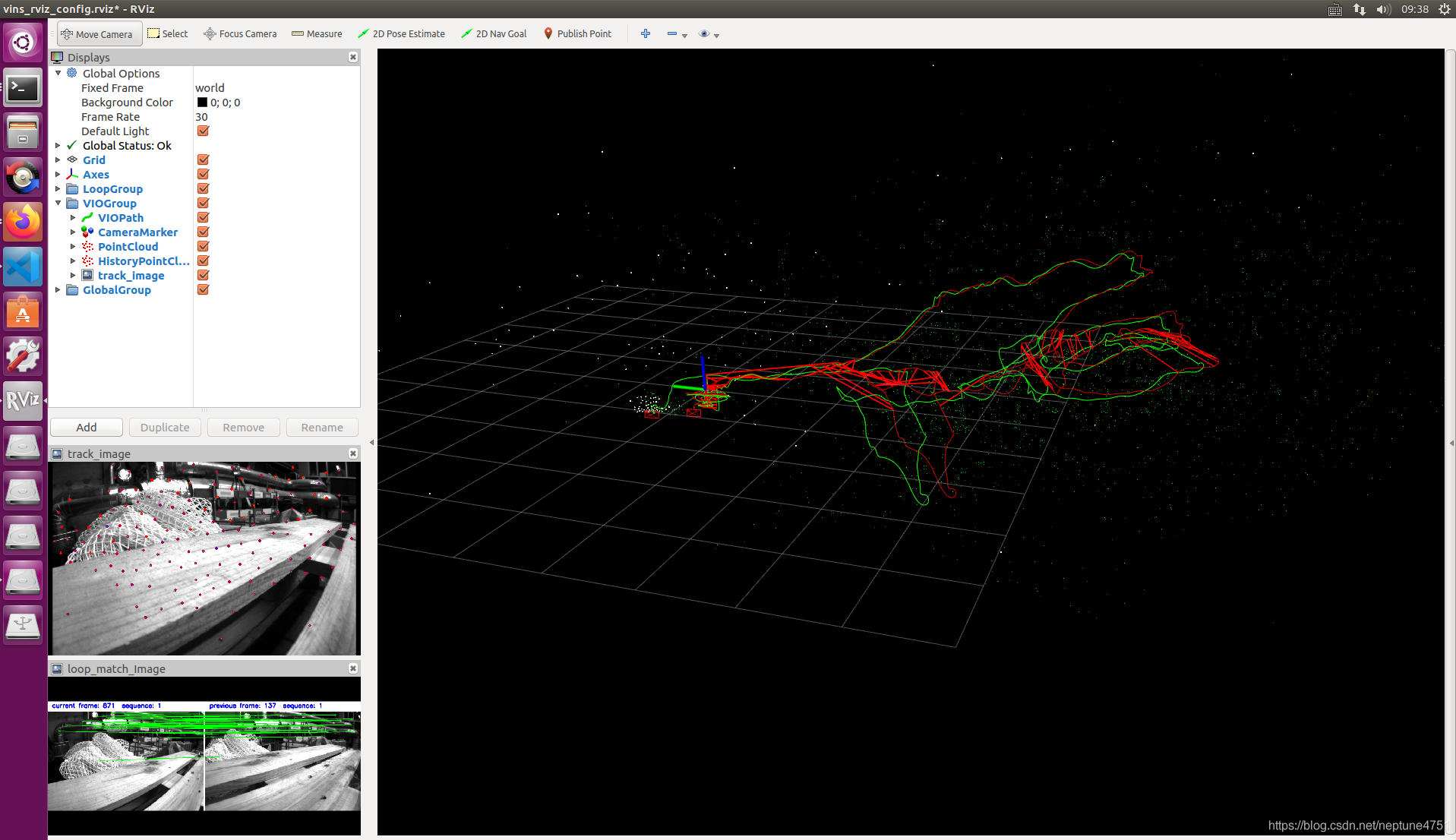
在rviz中運行的截圖為:
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/189875.html
標籤:其他