開發板購買鏈接
https://item.taobao.com/item.htm?spm=a2oq0.12575281.0.0.50111deb2Ij1As&ft=t&id=626366733674
開發板簡介
開發環境搭建 windows
原始碼示例:
0_Hello Bug (ESP_LOGX與printf) 工程模板/列印除錯輸出
1_LED LED亮滅控制
2_LED_Task 使用任務方式控制LED
3_LEDC_PWM 使用LEDC來控制LED實作呼吸燈效果
4_ADC_LightR 使用ADC讀取光敏電阻實作光照傳感
5_KEY_Short_Long 按鈕長按短按實作
6_TouchPad_Interrupt 電容觸摸中斷實作
7_WS2812_RMT RGB_LED彩虹變色示例
8_DHT11_RMT 使用RMT實作讀取DHT11溫濕度傳感器
9_SPI_SDCard 使用SPI總線實作TF卡檔案系統示例
10_IIC_ADXL345 使用IIC總線實作讀取ADXL345角度加速度傳感器
11_IIC_AT24C02 使用IIC總線實作小容量資料儲存測驗
12_IR_Rev_RMT 使用RMT實作紅外遙控接收掃碼(NEC)
13_IR_Send_RMT 使用RMT實作紅外資料發送(NEC)
14_WIFI_Scan 附近WIFI信號掃描示例
15_WIFI_AP 創建軟AP示例
16_WIFI_AP_TCP_Server 在軟AP模式下實作TCP服務端
17_WIFI_AP_TCP_Client 在軟AP模式下實作TCP客戶端
18_WIFI_AP_UDP 在軟AP模式下實作UDP通訊
19_WIFI_STA 創建STA站模
20_WIFI_STA_TCP_Server 在站模式STA下實作TCP服務端
21_WIFI_STA_TCP_Client 在站模式STA下實作TCP客戶端
22_WIFI_STA_UDP 在站模式STA下實作UDP通訊
23_LVGL_Test LVGL圖形庫簡單示例
IIC 簡介
IIC(Inter-Integrated Circuit)總線是一種由 PHILIPS 公司開發的兩線式串行總線,用于連接
微控制器及其外圍設備,它是由資料線 SDA 和時鐘 SCL 構成的串行總線,可發送和接收資料,
在 CPU 與被控 IC 之間、 IC 與 IC 之間進行雙向傳送, 高速 IIC 總線一般可達 400kbps 以上,
I2C 總線在傳送資料程序中共有三種型別信號, 它們分別是:開始信號、結束信號和應答
信號,
開始信號: SCL 為高電平時, SDA 由高電平向低電平跳變,開始傳送資料,
結束信號: SCL 為高電平時, SDA 由低電平向高電平跳變,結束傳送資料,
應答信號:接收資料的 IC 在接收到 8bit 資料后,向發送資料的 IC 發出特定的低電平脈沖,
表示已收到資料, CPU 向受控單元發出一個信號后,等待受控單元發出一個應答信號, CPU 接
收到應答信號后,根據實際情況作出是否繼續傳遞信號的判斷,若未收到應答信號,由判斷為
受控單元出現故障,
這些信號中,起始信號是必需的,結束信號和應答信號,都可以不要, IIC 總線時序圖如
圖所示: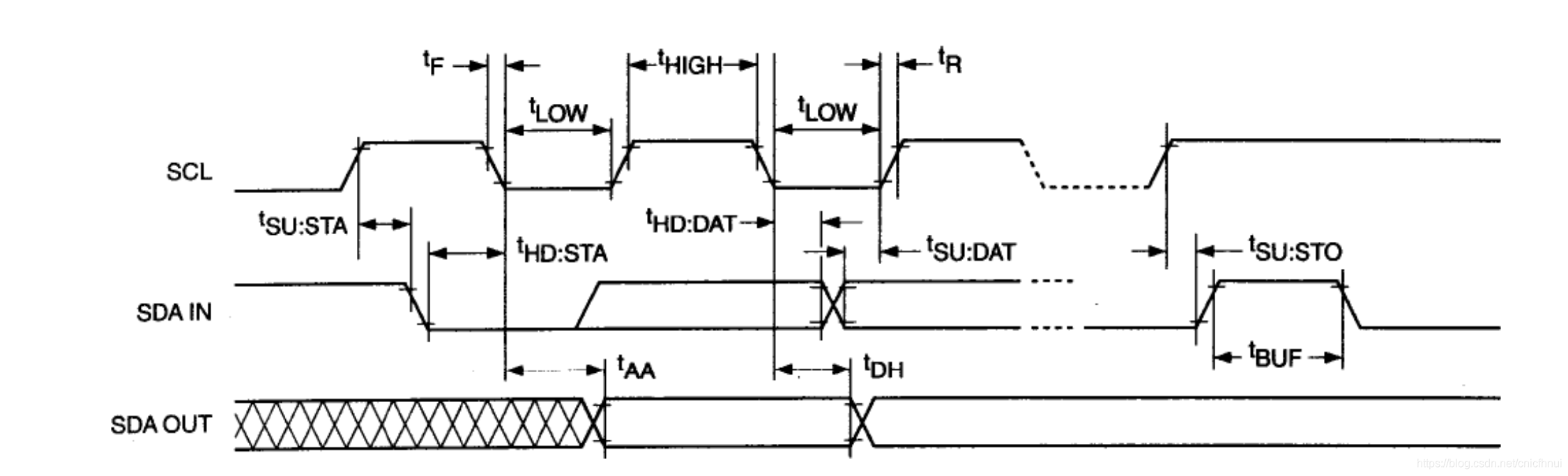
ADXL345 簡介
ADXL345 是 ADI 公司的一款 3 軸、數字輸出的加速度傳感器, ADXL345 是 ADI 公司推
出的基于 iMEMS 技術的 3 軸、數字輸出加速度傳感器,該加速度傳感器的特點有:
? 解析度高,最高 13 位解析度,
? 量程可變,具有+/-2g, +/-4g, +/-8g, +/-16g 可變的測量范圍,
? 靈敏度高,最高達 3.9mg/LSB,能測量不到 1.0°的傾斜角度變化,
? 功耗低, 40~145uA 的超低功耗,待機模式只有 0.1uA,
? 尺寸小,整個 IC 尺寸只有 3mm*5mm*1mm, LGA 封裝,
ADXL 支持標準的 I2C 或 SPI 數字介面,自帶 32 級 FIFO 存盤,并且內部有多種運動狀態
檢測和靈活的中斷方式等特性, ADXL345 傳感器的檢測軸如圖所示
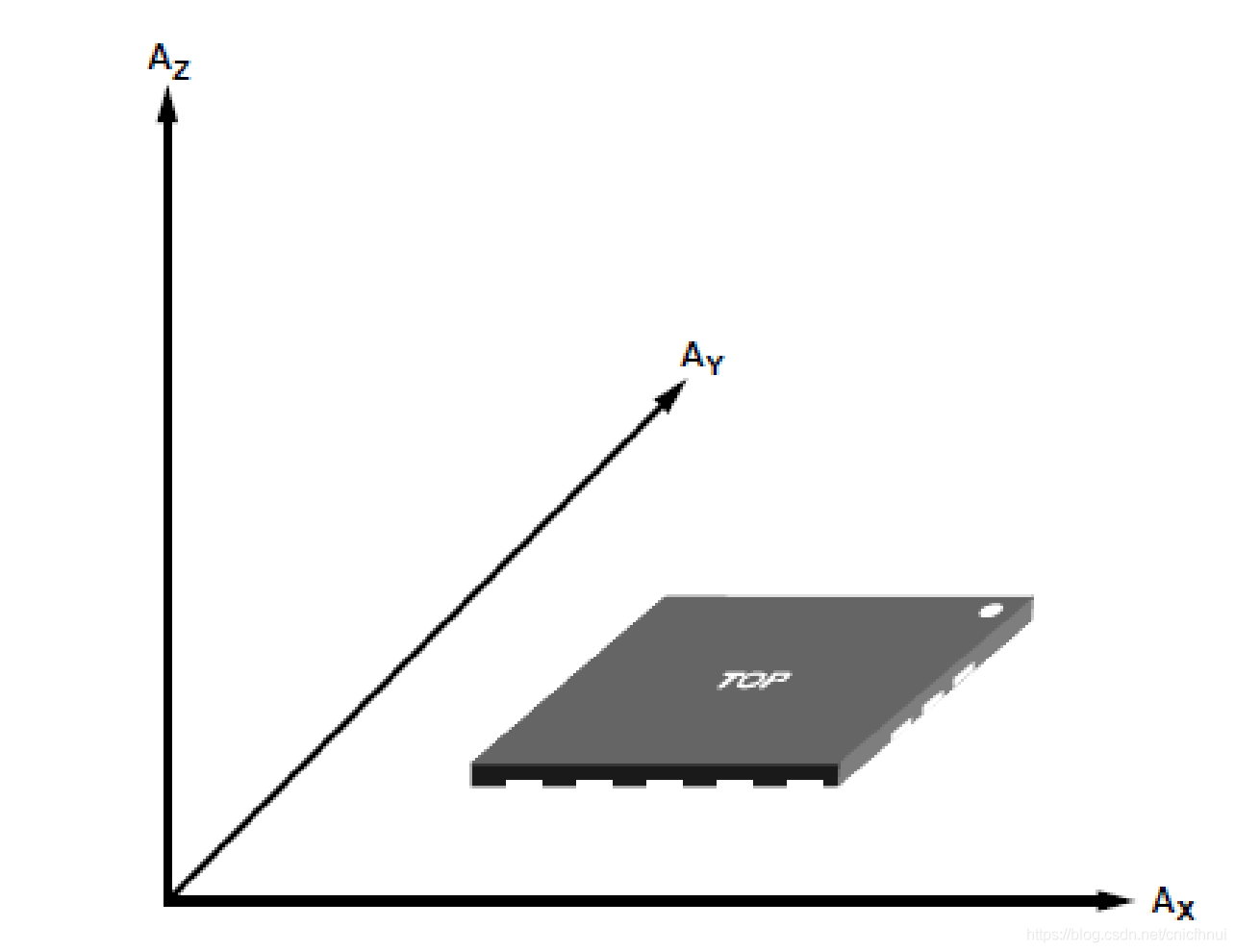
當 ADXL345 沿檢測軸正向加速時,它對正加速度進行檢測,在檢測重力時用戶需要注意,
當檢測軸的方向與重力的方向相反時檢測到的是正加速度,圖所示為輸出對重力的回應
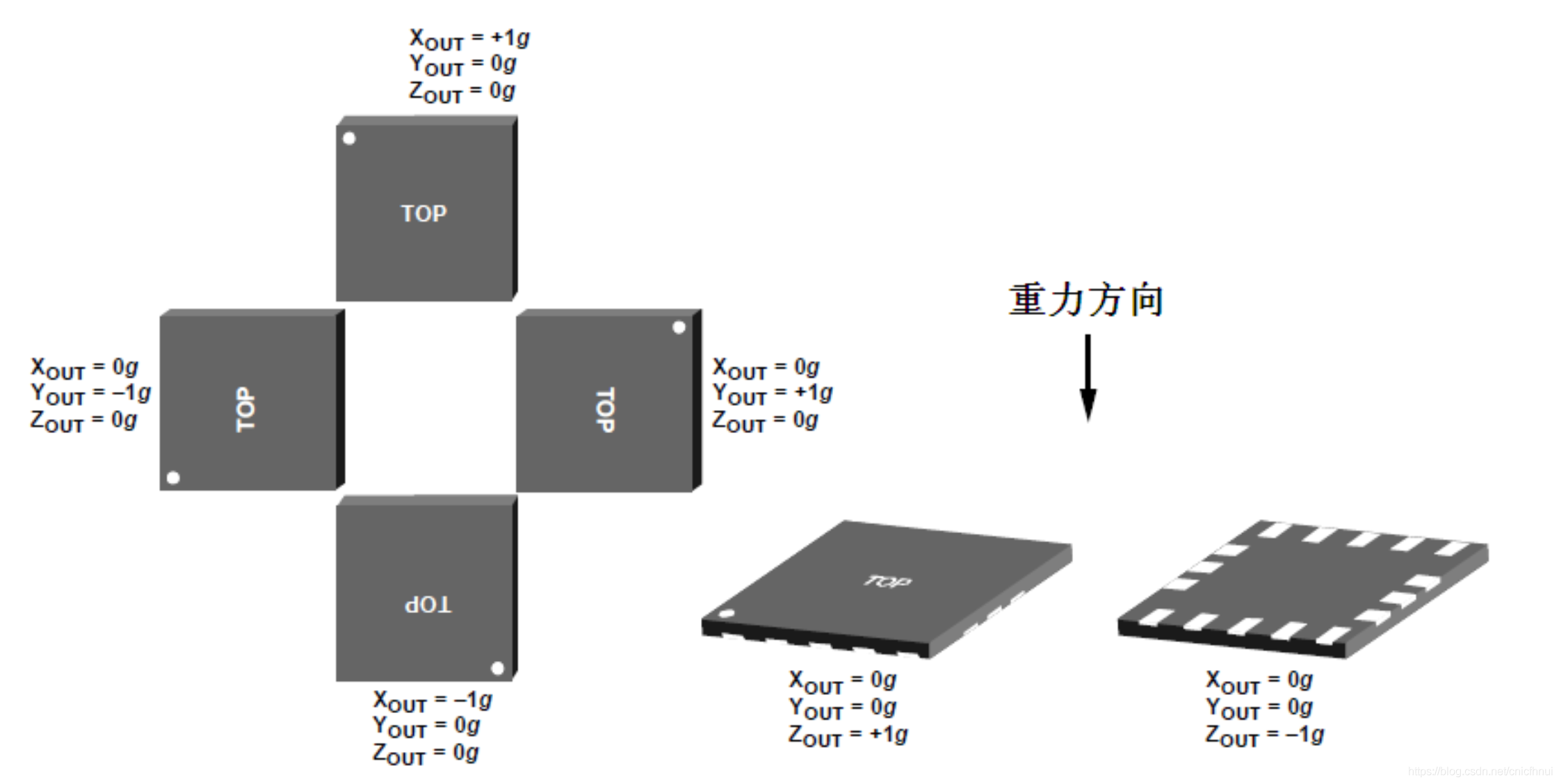
上圖列出了 ADXL345 在不同擺放方式時的輸出,以便后續分析,接下來我們看看
ADXL345 的引腳圖,如圖
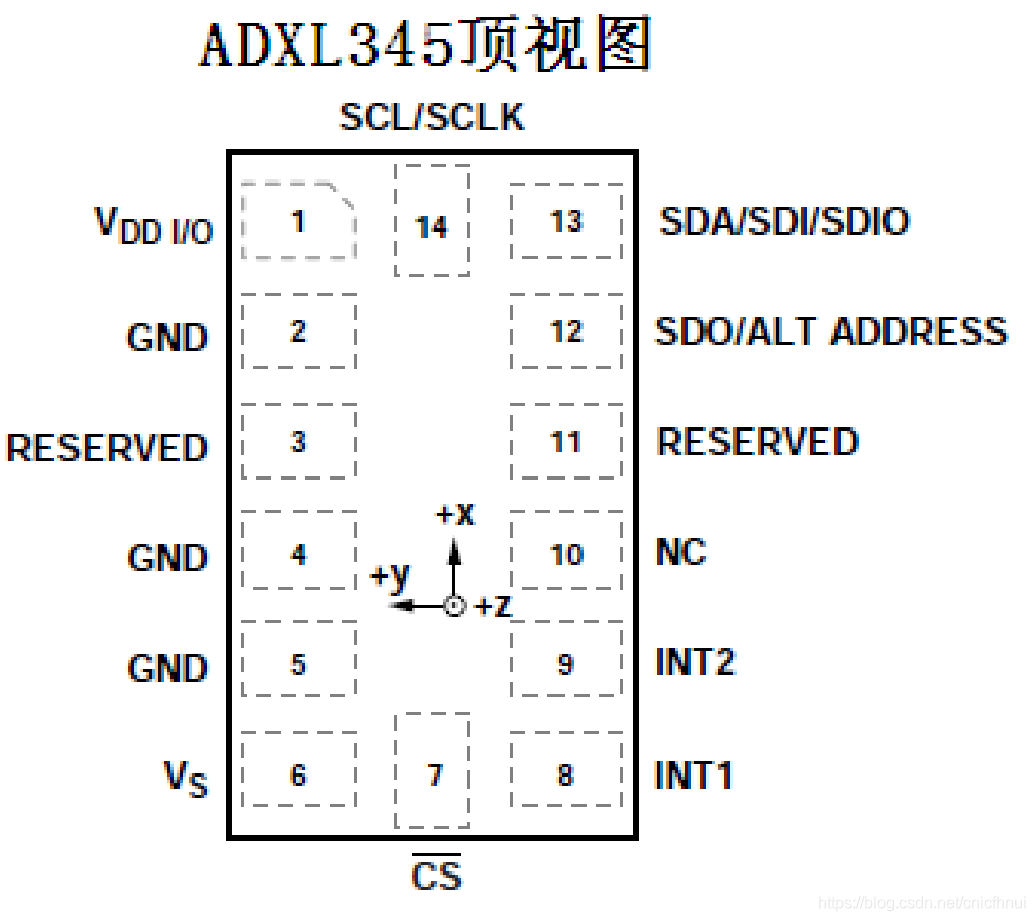
ADXL345 支持 SPI 和 IIC 兩種通信方式,為了節省 IO 口,開發板采用的是 IIC方式連接,官方推薦的 IIC 連接電路如圖所示: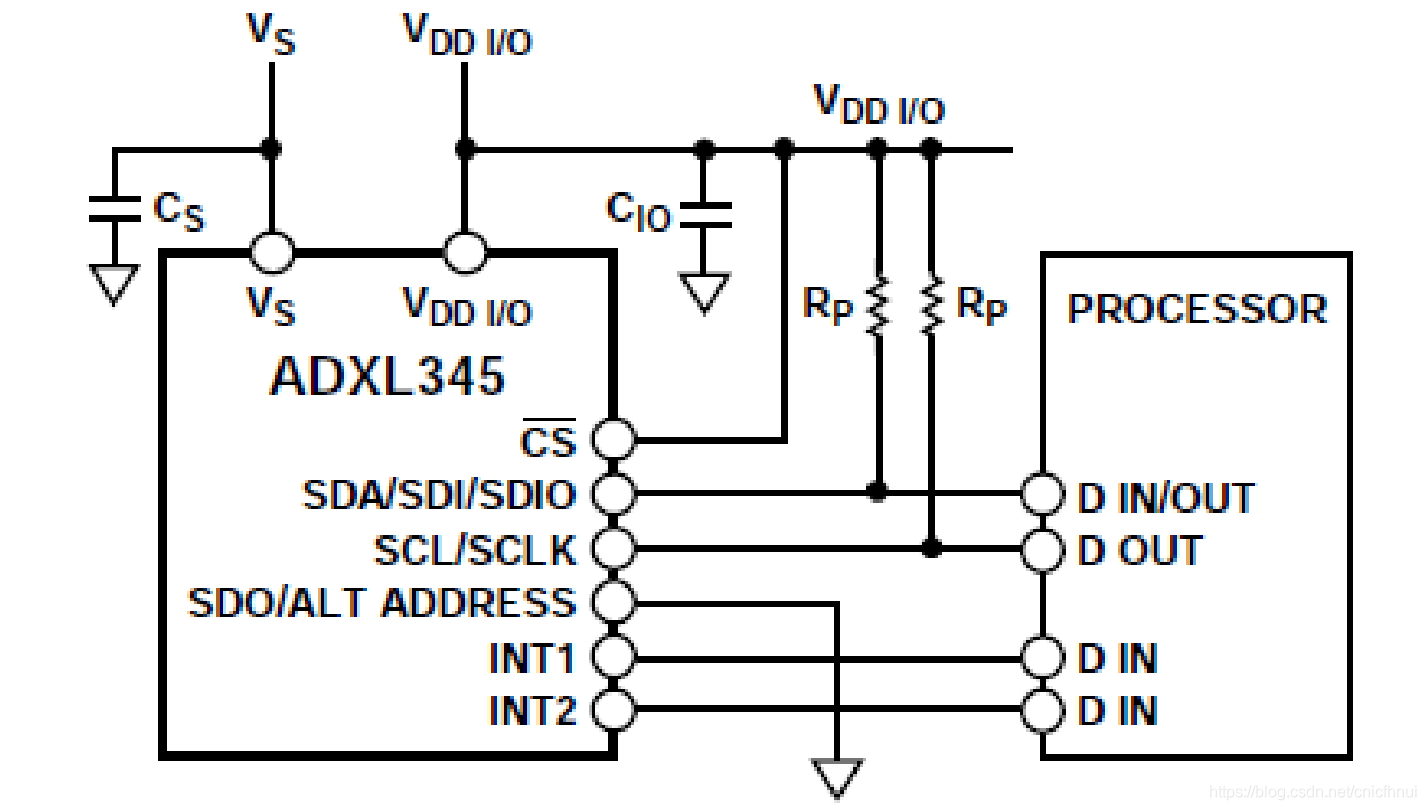
從上圖可看出, ADXL345 的連接十分簡單,外圍需要的器件也極少(就 2 個電容),如上
連接(SDO/ALT ADDRESS 接地),則 ADXL345 的地址為 0X53(不含最低位),如果 SDO/ALT
ADDRESS 接高,那么 ADXL345 的地址將變為 0X1D(不含最低位),
一、硬體設計/原理
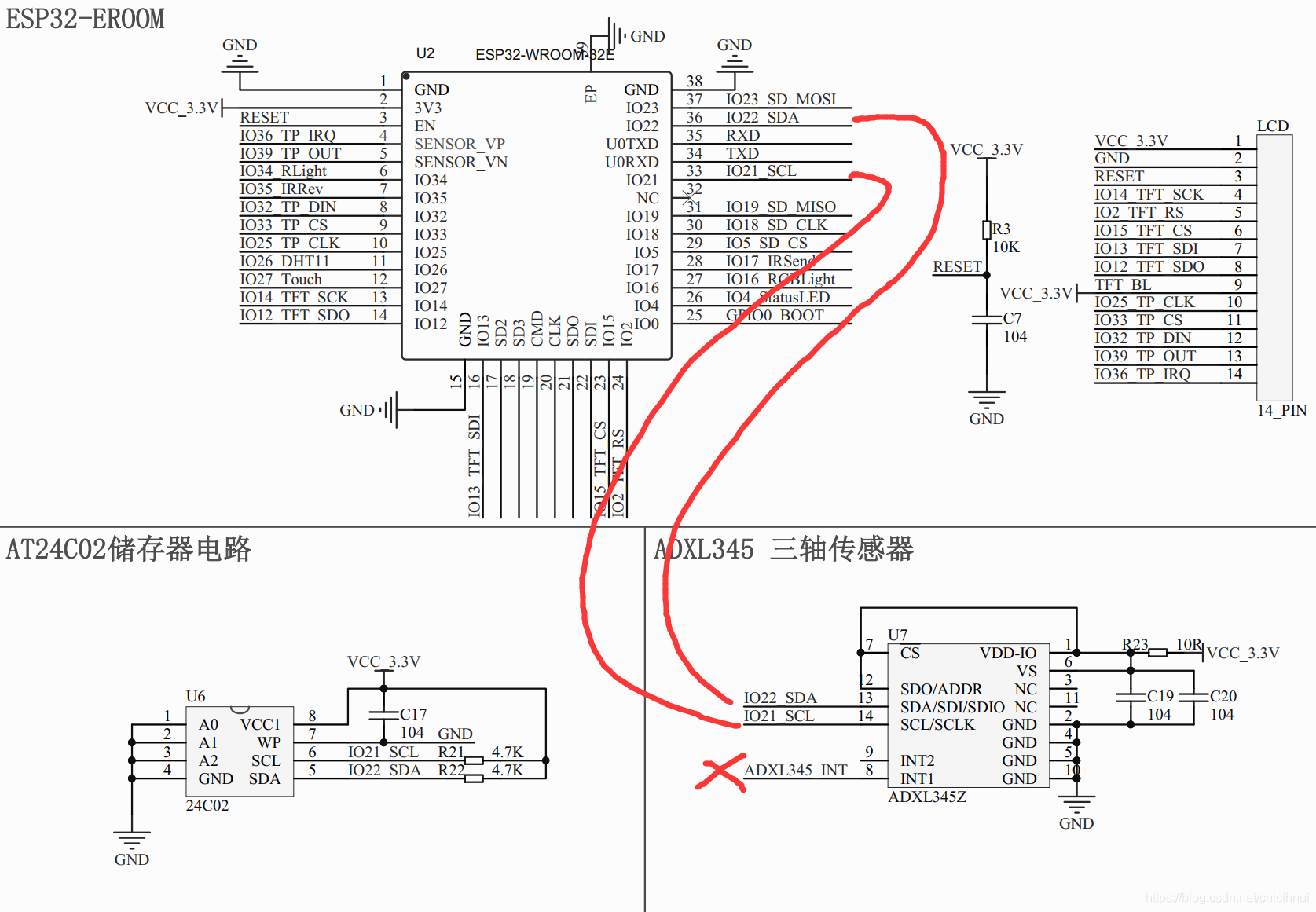
查看開發板原理圖,IIC的SDA接到了ESP32模塊的GPIO22,IIC的SCL接到了ESP32模塊的GPIO21引腳,INT引腳因為GPIO數量緊張所有未接主控,
二、程式設計
先參考必要頭檔案
// ADXL345 Example
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_system.h"
#include "esp_log.h"
#include "nvs_flash.h"
#include "driver/gpio.h"
#include "adxl345.h"定義資料線GPIO
// IIC信號線定義
#define SCL_PIN GPIO_NUM_21
#define SDA_PIN GPIO_NUM_22主函式開啟一個任務不停讀取傳感器資料
void app_main() {
ESP_LOGI(TAG, "APP Start......");
ESP_ERROR_CHECK(nvs_flash_init());
xTaskCreate(&ADXL345_Task, //pvTaskCode
"ADXL345_Task",//pcName
4096,//usStackDepth
NULL,//pvParameters
4,//uxPriority
NULL//pxCreatedTask
);
}任務函式中負責芯片初始化和死回圈讀取ADXL345姿態資料
static void ADXL345_Task(void *pvParameters) {
uint8_t ret = 0;
ret = Init_ADXL355(SDA_PIN,SCL_PIN);
ESP_LOGI(TAG,"Init_ADXL355: %d",ret);
ESP_LOGI(TAG,"Devices ID = 0x%02X ",GetAnalogDevicesID()); // Always 0xE5
while (1) {
Get_ADXL345_Average();
vTaskDelay(1000 / portTICK_RATE_MS);
}
}ADXL345初始化函式中,初始化IIC總線,檢查芯片ID,設定必要的暫存器
uint8_t Init_ADXL355(uint8_t sdaPin, uint8_t sclPin)
{
i2c_config_t conf; //I2C 配置結構體
conf.mode = I2C_MODE_MASTER; //I2C 模式
conf.sda_io_num = sdaPin; //SDA IO映射
conf.sda_pullup_en = GPIO_PULLUP_ENABLE; //SDA IO模式
conf.scl_io_num = sclPin; //SCL IO映射
conf.scl_pullup_en = GPIO_PULLUP_ENABLE; //SCL IO模式
conf.master.clk_speed = 200000; //I2C CLK頻率
i2c_param_config(I2C_NUM_1, &conf); //設定I2C1
//注冊I2C1服務即使能
i2c_driver_install(I2C_NUM_1, conf.mode,I2C_MASTER_RX_BUF_DISABLE,I2C_MASTER_TX_BUF_DISABLE,0);
if(GetAnalogDevicesID()==0XE5){ //讀取器件ID
ADXL345_WR_Reg(INT_ENABLE,0x00); // 先關閉中斷
ADXL345_WR_Reg(DATA_FORMAT,0X0B); // 禁用自測力 4線spi模式 高電平中斷有效,13位全解析度,輸出資料右對齊,16g量程 1B
ADXL345_WR_Reg(BW_RATE,0x1A); // 低功耗模式,最低速度 資料輸出速度為100Hz 12.5
ADXL345_WR_Reg(POWER_CTL,0x08); // 自動休眠模式 休眠時以8HZ頻率采樣 INT_ENABLE 38 08
ADXL345_WR_Reg(INT_MAP,0xA0); // THRESH_TAP/ACTIVITY映射到INT1引腳
ADXL345_WR_Reg(THRESH_ACT,125); // 檢測活動(ACTIVITY)的閾值,62.5mg/LSB ,其中0x10代表16, 16*62.5=1000mg, 也就是1g, 0x04表示4*62.5 = 250mg
ADXL345_WR_Reg(THRESH_INACT,0x40); // 設定靜止檢測閾值inactivity 62.5mg/LSB
ADXL345_WR_Reg(TIME_INACT,0x01); // 當小于inactivity值時間超過0X02 2s后進入睡眠模式
ADXL345_WR_Reg(ACT_INACT_CTL,0x77); // 直流觸發配置,XYZ使能觸發配置,所有軸都參與 CC
ADXL345_WR_Reg(THRESH_FF,0x08); // 自由跌落閾值,0x05-0x09 300mg-600mg 所有軸都參與判斷加速度 62.5mg/LSB
ADXL345_WR_Reg(TIME_FF,0x14); // 自由跌落時間 0x14-0x46 100ms-350ms 5ms/LBS
ADXL345_WR_Reg(INT_ENABLE,0x14); // 中斷使能 使能Activity中斷,使能Free_Fall中斷 14
return 0;
}
return 1;
}使用IIC讀取/寫入暫存器
//寫ADXL345暫存器
//addr:暫存器地址
//val:要寫入的值
//回傳值:無
void ADXL345_WR_Reg(uint8_t addr,uint8_t val)
{
esp_err_t ret = 0;
uint8_t data = 0;
i2c_cmd_handle_t cmd = i2c_cmd_link_create();
i2c_master_start(cmd);
i2c_master_write_byte(cmd, SensorAdd << 1 | I2C_MASTER_WRITE, ACK_CHECK_EN);
i2c_master_write_byte(cmd, addr, ACK_CHECK_EN);
i2c_master_write_byte(cmd, val, ACK_CHECK_EN);
i2c_master_stop(cmd);
ret = i2c_master_cmd_begin(I2C_NUM_1, cmd, 1000 / portTICK_RATE_MS);
i2c_cmd_link_delete(cmd);
return data;
}
//讀ADXL345暫存器
//addr:暫存器地址
//回傳值:讀到的值
uint8_t ADXL345_RD_Reg(uint8_t addr)
{
esp_err_t ret = 0;
uint8_t data = 0;
i2c_cmd_handle_t cmd = i2c_cmd_link_create();
i2c_master_start(cmd);
i2c_master_write_byte(cmd, SensorAdd << 1 | I2C_MASTER_WRITE, ACK_CHECK_EN);
i2c_master_write_byte(cmd, addr, ACK_CHECK_EN);
i2c_master_start(cmd);
i2c_master_write_byte(cmd, SensorAdd << 1 | I2C_MASTER_READ, ACK_CHECK_EN);
i2c_master_read_byte(cmd, &data, NACK_VAL);
i2c_master_stop(cmd);
ret = i2c_master_cmd_begin(I2C_NUM_1, cmd, 1000 / portTICK_RATE_MS);
i2c_cmd_link_delete(cmd);
return data;
} 讀取角度資訊
// ADXL345 角度采集
uint16_t Get_ADXL345_Average(void)
{
short x,y,z;
short angx,angy,angz;
uint8_t xbuf[15], ybuf[15], zbuf[15];
//得到X,Y,Z軸的加速度值(原始值)
ADXL345_Read_Average(&x, &y,&z,10); //讀取X,Y,Z三個方向的加速度值
//printf("ADXL345-> X:%d Y:%d Z:%d \r\n",x,y,z); //顯示加速度原始值
//得到角度值,并顯示
angx=ADXL345_Get_Angle(x,y,z,1);
angy=ADXL345_Get_Angle(x,y,z,2);
angz=ADXL345_Get_Angle(x,y,z,0);
memset(xbuf,0,15);
memset(ybuf,0,15);
memset(zbuf,0,15);
if(angx<0){
angx = -angx;
sprintf((char *)xbuf,"-%d.%d",(uint16_t)angx/10,(uint16_t)angx%10);
}else{
sprintf((char *)xbuf,"%d.%d",(uint16_t)angx/10,(uint16_t)angx%10);
}
if(angy<0){
angy = -angy;
sprintf((char *)ybuf,"-%d.%d",(uint16_t)angy/10,(uint16_t)angy%10);
}else{
sprintf((char *)ybuf,"%d.%d",(uint16_t)angy/10,(uint16_t)angy%10);
}
if(angz<0){
angz = -angz;
sprintf((char *)zbuf,"-%d.%d",(uint16_t)angz/10,(uint16_t)angz%10);
}else{
sprintf((char *)zbuf,"%d.%d",(uint16_t)angz/10,(uint16_t)angz%10);
}
printf("ADXL345->ANG X:%s Y:%s Z:%s \r\n",xbuf,ybuf,zbuf); //顯示加速度原始值
return (uint16_t)angz/10;
}三、下載測驗
打開ESP-IDF Command Prompt
cd命令進入此工程目錄
cd F:\ESP32_DevBoard_File\10_IIC_ADXL345查看電腦設備管理器中開發板的串口號
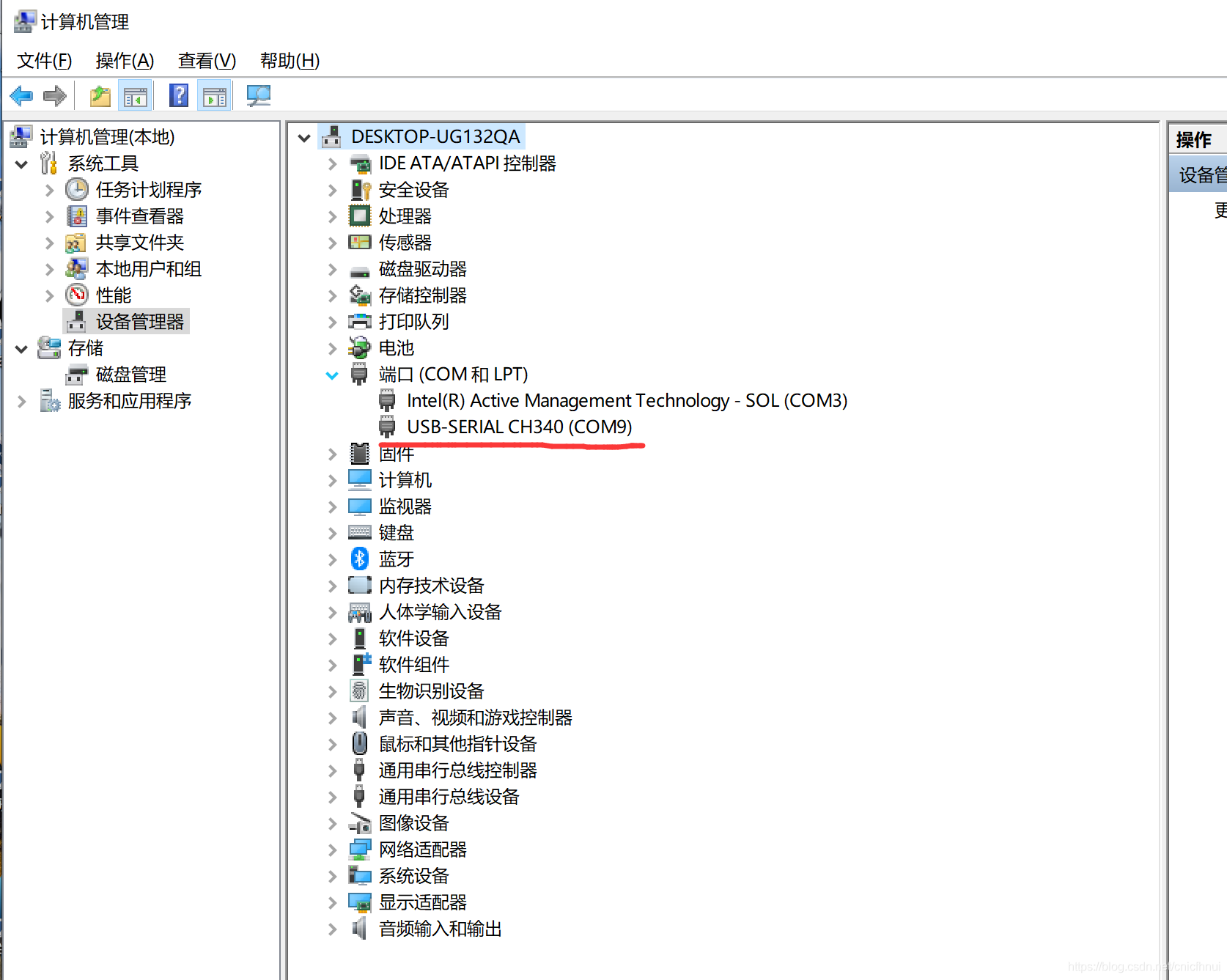
執行idf.py -p COM9 flash monitor從串口9下載并運行打開口顯示設備除錯資訊 Ctrl+c退出運行
把開發板轉換不同角度,查看串口資訊開發板角度姿態資料
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/19253.html
標籤:其他