說在前面:
在下的目標是對相機和機械臂進行手眼標定,由于機械臂并不是市面上的常用機械臂,所以沒有前人的方法借鑒。本人采用的方法是利用最小二乘的思想間接求解出其旋轉(R)和平移矩陣(T)
參考:https://blog.csdn.net/u012836279/article/details/80203170
遇到的問題:
利用采集到的相機和機械臂的點集合,求解出來的旋轉和平移的矩陣差距較大。
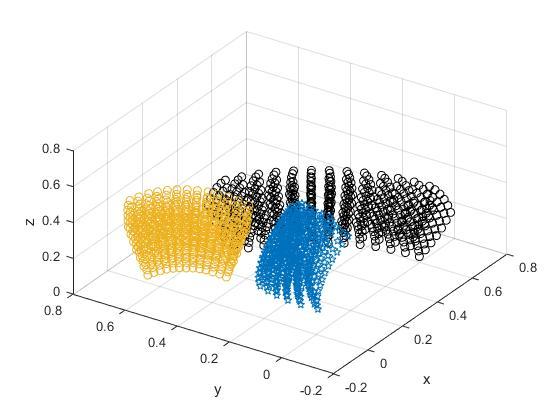
上圖藍色是檢測點在相機下的坐標,黑色是檢測點在機械臂基座標下的坐標,黃色是根據求解出來的R,T和相機下坐標反向求出的坐標。
以上若有什么地方說不清,請告知。歡迎各位大佬不吝賜教!救救菜狗子吧~
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/193065.html
標籤:驅動開發/核心開發