【論文閱讀】22-GMS: Grid-based Motion Statistics for Fast, Ultra-robust Feature Correspondence
- 0、basic info
- 1、演算法核心
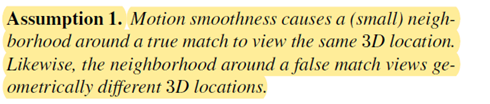
- 1.1、核心假設--motion smoothness
- 1.2、演算法特點
- 2、演算法細節
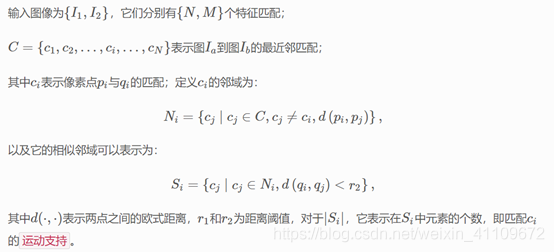
- 2.1、matching supporting
- 2.2、matches statistical measures
- 2.2.1、Si分布
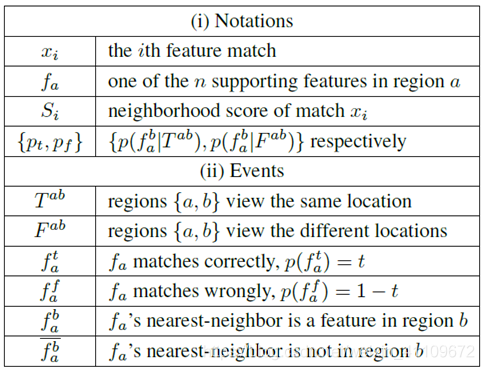
- 2.2.2、相關符號
- 2.3、Multi-neighborhood
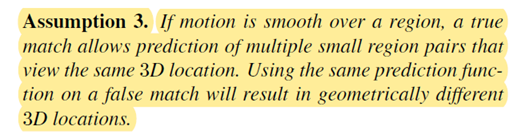
- 2.3.1、原理/假設
- 2.3.2、相關公式
- 2.3.、關于P(true && false 的區分度)的分析
- 2.4、grid-based
- 2.4.1、確定cell-pair
- 2.4.2、改進matching supporting 計算
- 2.5、Extension--引入 scale && rotation
- 2.5.1、Scale:
- 2.5.2、Rotation
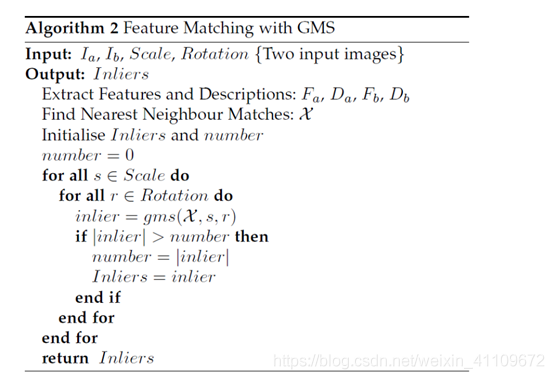
- 3、演算法流程
- 4. 演算法細節--重要
- 5、結果
Fast, Ultra-robust Feature Correspondence)
0、basic info
Bian J , Lin W Y , Matsushita Y , et al. GMS: Grid-Based Motion Statistics for Fast, Ultra-Robust Feature Correspondence[C]// IEEE Conference on Computer Vision & Pattern Recognition. IEEE, 2017.
- 開源代碼
CODE - 參考資料
- 參考博客1
- 參考博客2






- 參考ppt

(未細看)
Graph matching --- slow && robust


1、演算法核心
1.1、核心假設–motion smoothness
1.2、演算法特點
將motion smoothness constraint 轉換為 matching supporting
matches statistical measures in neighborhoods
采用基于matching supporting的閾值,get the result: true or false


2、演算法細節
2.1、matching supporting


2.2、matches statistical measures
2.2.1、Si分布

(the matching of each feature is independent, Si follows the binomial distribution)
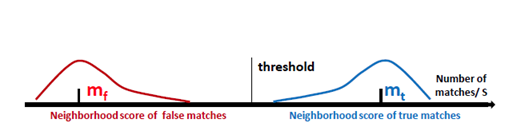
(making S score a useful indicator for differentiating true and false matches)
2.2.2、相關符號
- n:the number of the features in the region a (I_a)
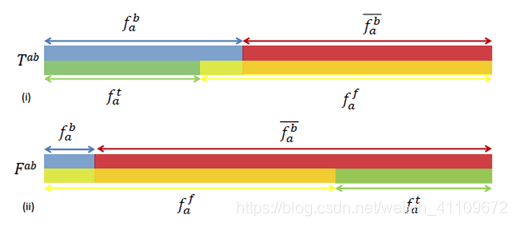
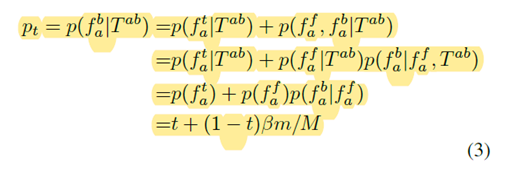
等式右邊第二項表示的是上圖(i)中的事件(用下圖顏色表示)

4.
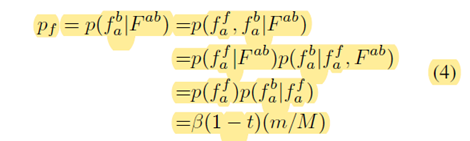
第二個等式右邊表示的是上圖(ii)中的事件(用下圖顏色表示)
5. 
M:the number of the features in image2
- 原理:


2.3、Multi-neighborhood
2.3.1、原理/假設
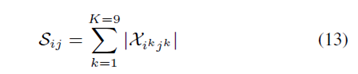
2.3.2、相關公式


(n: the average number of features in the subregion)


2.3.、關于P(true && false 的區分度)的分析

- 與n正相關

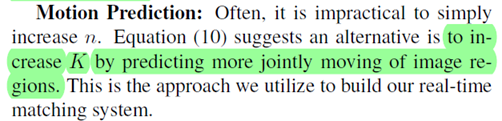
- 增大K
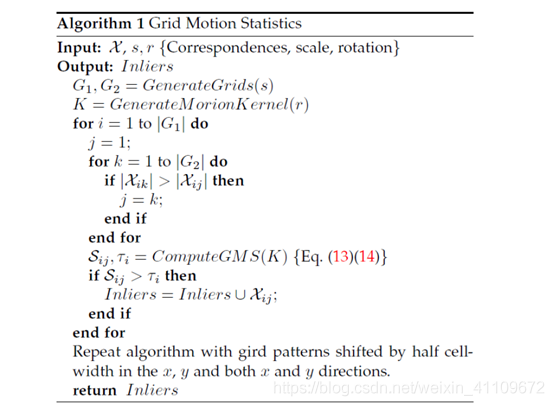
2.4、grid-based
- grid-based 作用
快速確定鄰域—grid
避免重復計算cell-pair(同一個grid的features共享同一組cell pair)
PS: 針對features 位于grid 邊緣的情況,shift the grid,得到grid',再重復相關步驟
2.4.1、確定cell-pair
grid-selection : 與第一個影像 網格grid_a 匹配數量最多的一個grid_b,組成cell-pair
2.4.2、改進matching supporting 計算
疑惑:???

結論:gms --low rotation效果更好
2.5、Extension–引入 scale && rotation
基于不同的scale、rotation,運行GMS,選擇
inlier matches數目最多的,作為最終結果
2.5.1、Scale:
Image2 網格劃分多尺度
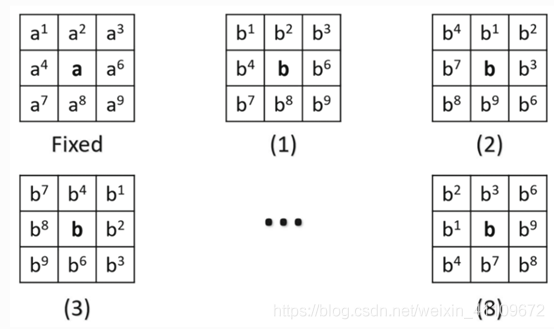
2.5.2、Rotation
Cell-pair-- gird_b :
only K鄰域旋轉 得到不同的match neighborhoods groups
3、演算法流程
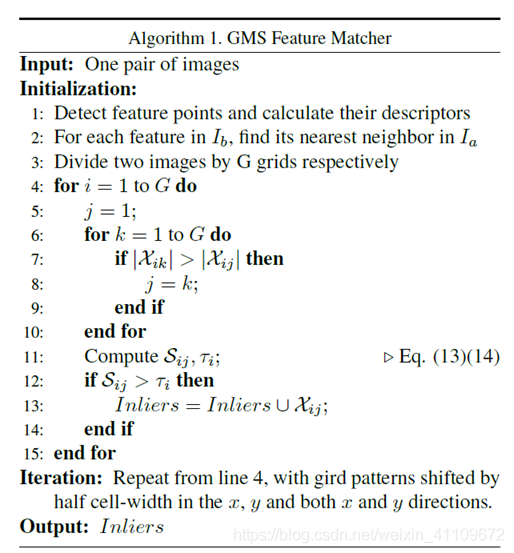
上文演算法框圖是針對特定的scale、rotation,具體可看ppt中演算法流程框圖
4. 演算法細節–重要

Large, well-textured:more ---解決:resize—480*480
Small, less-texture: less ----解決:FAST thresholds =0
FAST:
E. Rosten and T. Drummond. Machine learning for highspeed corner
detection. In European conference on computer vision, pages 430–443.
Springer, 2006.
- Matching support閾值:


n: the average number of features in the subregion
- ORB features
- BF hamming distance
5、結果
-
資料集
-
指標:Recall && precision && F-measure

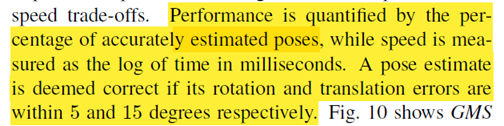
-
Performance:
轉載請註明出處,本文鏈接:https://www.uj5u.com/qita/194358.html
標籤:其他
上一篇:STM32 I2C總線從機發送接收原始碼下載,有圖有真相!
下一篇:stm32學習